一种自动对接装置及飞行器
本技术涉及对接,具体而言,涉及一种自动对接装置及飞行器。
背景技术:
1、随着科技的发展,自动化机械代替人类作业已然成为一种趋势。尤其是在危险系数高且人类难以操作的技术领域中,自动化机械代替人类作业是必然走势,如航空航天领域中,自然条件和空间的限制,人类难以操作完成作业,尤其是针对舱段中航插头和插芯的对接,亟需一种能够代替人力的自动对接装置。
技术实现思路
1、本技术提供一种自动对接装置及飞行器,以提供一种能够代替人力完成插头和插芯对接的自动对接装置。
2、第一方面,本技术实施例提供一种自动对接装置,所述自动对接装置包括:
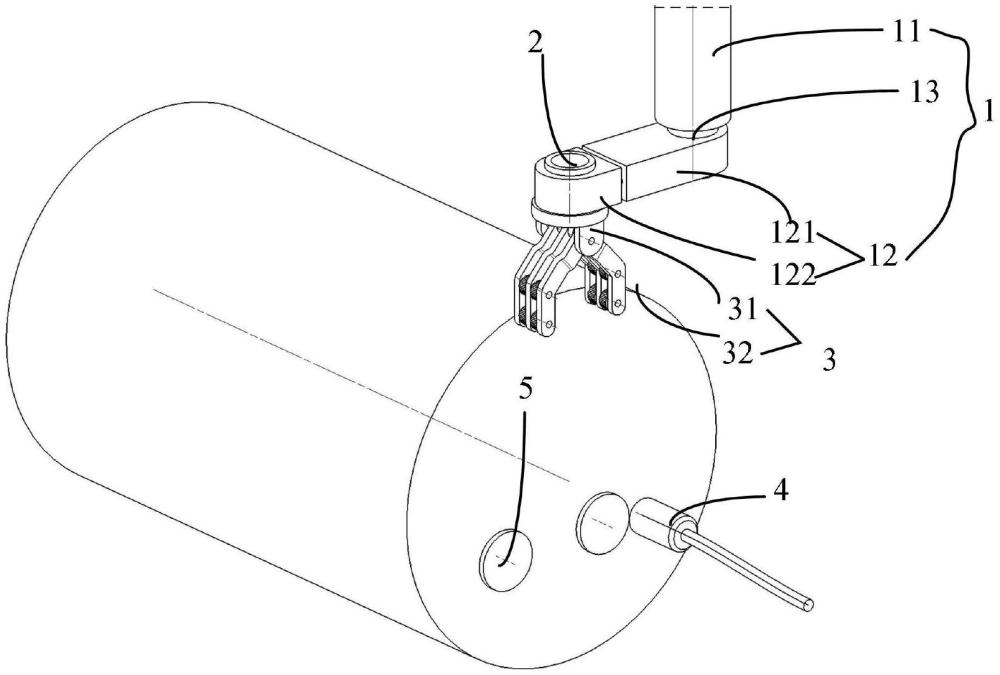
3、机械臂,输入端用于连接外部的用于带动所述机械臂旋转和进给的转进机构;
4、旋转臂,输入端转动连接于所述机械臂的输出端,可相对所述机械臂独立旋转;
5、夹持器,用于夹持并锁紧插头,安装于所述旋转臂的输出端,可在所述旋转臂的旋转带动下实现自转,以及在所述机械臂的带动下通过所述旋转臂实现旋转或/和进给运行。
6、在本技术的一个实施例中,所述机械臂包括:主臂、副臂和连接轴;
7、所述主臂的输入端用于连接于所述转进机构,可在所述转进机构的带动下实现旋转以及沿着第一方向的进给运动、第二方向的进给运动和第三方向的进给运动;所述主臂的输出端通过所述连接轴连接于所述副臂的输入端,所述副臂的输出端转动连接于所述旋转臂;其中,所述第一方向为主臂的长度方向,第二方向为副臂的长度方向,第三方向为均垂直所述第一方向和所述第二方向的方向。
8、在本技术的一个实施例中,所述副臂包括支撑臂和输出端设有轴套的转动臂;
9、所述支撑臂的输入端通过所述连接轴连接于所述主臂的输出端,所述支撑臂的输出端连接于所述转动臂的输入端;
10、所述转动臂的输出端通过轴套以相对所述旋转臂独立转动的方式转动套设于所述旋转臂。
11、在本技术的一个实施例中,所述旋转臂还设有第一挡位和第二挡位,在所述旋转臂处于第一挡位时,所述夹持器在所述旋转臂的旋转运动下可实现自转,以调整用于与插芯对齐的位姿;在所述旋转臂处于第二挡位时,在所述旋转臂带动所述夹持器正转的过程中,所述夹持器逐渐夹紧插头直至锁紧插头,在所述旋转臂带动所述夹持器反转的过程中,所述夹持器逐渐释放插头直至松开插头。
12、在本技术的一个实施例中,所述夹持器包括安装座和用于夹持并锁紧插头的两组旋转轮系,所述两组旋转轮系以正交交叉的方式转动连接于所述安装座,所述安装座连接于所述旋转臂的输出端。
13、在本技术的一个实施例中,所述插头为航空插头,所述航空插头包括用于带动插针转动的内圈和锁紧插针自由度的外圈,每一组旋转轮系至少包括两组轮面设有摩擦纹的滑轮,其中,两组旋转轮系中相对且远离所述安装座的一组滑轮用于带动所述内圈转动以使所述插针与插芯对齐;两组旋转轮系中相对且靠近所述安装座的一组滑轮用于带动所述外圈转动以在所述插针与插芯对接的情况下转动所述外圈锁紧航空插头。
14、在本技术的一个实施例中,所述旋转轮系包括至少两条弯钩条形板、至少1组轮面设有摩擦纹的滑轮和至少1个联动轴,其中;
15、所述弯钩条形板为侧面构成设定角度的条形板;
16、所述滑轮通过所述联动轴贯穿连接于相邻两条弯曲条形板间,其中,一条联动轴贯穿至少一个滑轮,一个滑轮贯穿于相邻两条弯曲条形板间,且仅能沿着用于锁紧插头的设定方向转动;
17、两组所述旋转轮系以滑轮正对的方式正交转动安装于所述安装座中,两组所述旋转轮系中远离所述安装座的条形板平行。
18、在本技术的一个实施例中,所述旋转轮系包括至少两条弯钩条形板、至少两组轮面设有摩擦纹的滑轮和至少两个联动轴,一组滑轮至少包括一个滑轮,所述联动轴用于与外面的控制系统电连接,在所述控制系统的控制下,可带动所述滑轮转动;
19、所述弯钩条形板为侧面构成设定角度的条形板;
20、一组所述滑轮通过所述联动轴贯穿连接于相邻两条弯曲条形板间,其中,一条联动轴贯穿至少一组滑轮,一组滑轮贯穿于相邻两条弯曲条形板间;
21、两组所述旋转轮系以每组滑轮正对的方式正交转动安装于所述安装座中,两组所述旋转轮系中远离所述安装座的条形板平行,在需要所述插针与插芯对齐的情况下,与所述安装座远离的滑轮在控制系统的控制下转动,以使插针与插芯对齐;在需要所述插针与插芯锁紧的情况下,与所述安装座靠近的滑轮在控制系统的控制下转动,以锁紧所述航空插头。
22、在本技术的一个实施例中,所述安装座包括设有通孔的双耳板、底板和安装轴,所述双耳板以垂直且正对方式间隔安装于所述底板,所述底板中与安装所述双耳板的板面相背的板面安装有旋转臂的输出端;所述安装轴贯穿所述两组旋转轮系的交叉部位和所述通孔连接于所述双耳板间;或/和
23、所述安装座包括设有通孔的双耳板、底板和安装轴,所述双耳板以垂直且正对方式间隔安装于所述底板,所述底板中与安装所述双耳板的板面相背的板面安装有旋转臂的输出端;所述安装轴贯穿所述两组旋转轮系的交叉部位和所述通孔连接于所述双耳板间,所述旋转臂的输出端设有捏合组件和卡接件,底板为设有用于贯穿弯钩条形板中未设滑轮的开合端部,底板中与安装所述双耳板相背的板面设有卡接槽,当所述旋转臂处于所述第一挡位时,所述旋转臂的卡接件插入所述卡接槽,所述夹持器在旋转臂的旋转运动下可实现自转,以调整用于与插芯对齐的位姿;在所述旋转臂处于第二挡位时,所述旋转臂在正转的过程中,所述捏合组件分离所述弯钩条形板的开合端部逐渐远离,使得设有滑轮端的弯钩条形板逐渐夹紧插头直至锁紧插头,在所述旋转臂反转的过程中,所述捏合组件捏合弯钩条形板的开合端部逐渐靠近,使得设有滑轮端的弯钩条形板逐渐释放插头直至松开插头。
24、第二方面,本技术实施例又提供了一种飞行器,包括飞行器主体、上述任一项实施例所述的自动对接装置、转进机构、设置于所述飞行器主体的航插座和插头;
25、所述转进机构的输入端安装于所述飞行器主体,所述转进机构的输出端连接于所述自动对接装置,所述飞行器主体与自动对接装置电连接,并在所述飞行器主体中控制系统的控制下,夹持所述插头并锁紧,调整所述自动对接装置,使得所述插头与所述航插座对齐并插接于所述航插座的插芯后锁紧。
26、由此可见,本技术实施例提供了一种自动对接装置及飞行器,在该自动对接装置中,机械臂的输入端用于连接外部的用于带动所述机械臂旋转和进给的转进机构;旋转臂的输入端转动连接于所述机械臂的输出端,可相对所述机械臂独立旋转;用于夹持并锁紧插头的夹持器安装于旋转臂的输出端,可在旋转臂的旋转带动下实现自转,以及在机械臂的带动下通过所述旋转臂实现旋转或/和进给运行。可见,本实施例中的自动对接装置在机械臂和旋转臂配合作用下,夹持器能够夹持和锁紧插头并与设定的插座中的插芯自动插接;应用本实施例提供的自动对接装置无需人参与对接,完全满足自动插接需求,同时也避免了人参与其中的危险。
- 还没有人留言评论。精彩留言会获得点赞!