一种晶圆移载路径控制系统以及采用该系统的搬运装置的制作方法
本发明涉及一种控制系统和搬运装置,特别是一种晶圆移载路径控制系统以及采用该系统的搬运装置。
背景技术:
1、晶圆移载装置是一种搬运装置,这种搬运装置需要和控制系统配套使用,由控制系统控制搬运装置的动作过程,一般是以编写程序的方式设计控制系统,每次编写好一部分程序,程序编译后转换为与之对应的机器语言操控搬运装置,这种控制系统的缺点在于只能满足固定动作功能,不能进行功能扩展,开发速度非常缓慢,且这种控制系统目前主要由国外厂家提供,采用英文操作,不符合国内的应用场景,操作繁琐,就导致了这种控制系统实际上并不好用。
技术实现思路
1、为了克服现有技术的不足,本发明的一个目的在于提供一种操作简单、实用的晶圆移载路径控制系统。
2、本发明解决其技术问题所采用的技术方案是:
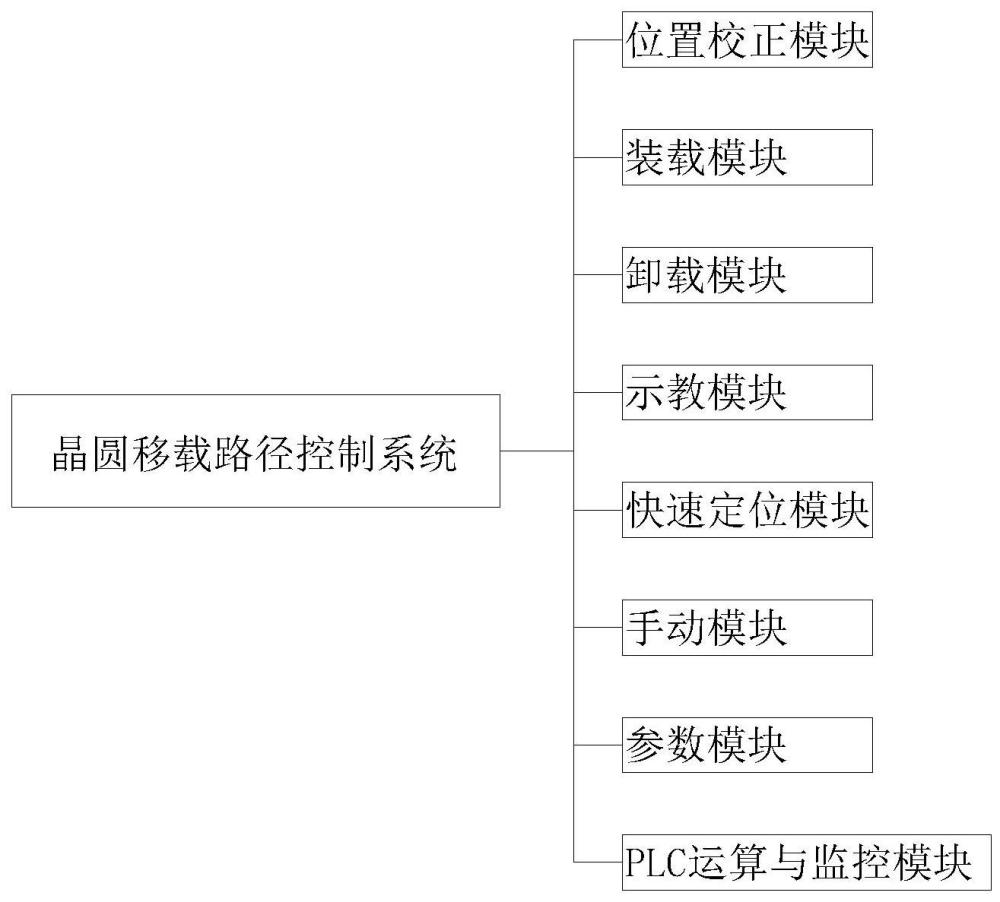
3、一种晶圆移载路径控制系统,该系统用于控制机械臂,所述机械臂包括从上而下依次连接在一起的平衡臂、旋转臂和升降臂,所述升降臂的下方设置有可与其接触的触发式开关,所述升降臂接触触发式开关时所述升降臂的位置作为基准坐标系的零点位置,所述升降臂在第一升降动力机构的驱动下升降,所述升降臂上的第二动力机构驱动所述旋转臂在所述升降臂的上方左右摆动,所述旋转臂上的第三动力机构驱动所述平衡臂在所述旋转臂的顶端左右摆动,该系统包括位置校正模块、装载模块、卸载模块、示教模块、快速定位模块、手动模块、参数模块和plc运算与监控模块;所述位置校正模块自动分别寻找平衡臂、旋转臂、升降臂、第一升降动力机构、第二动力机构、第三动力机构,并根据所述触发式开关是否被触发以判断所述触发式开关是否处于零点位置,建立基准坐标系;所述装载模块控制机械臂将晶圆盒从移载平台搬运到设备端平台的过程,同时完成搬运过程中的各种安全保护、位置检测、整理、数量计算,所述卸载模块控制机械臂将晶圆盒从设备端平台搬运到移载平台的过程,同时完成搬运过程中的各种安全保护、位置检测、整理、数量计算,是所述装载模块的逆过程;所述示教模块通过手动模块调整机械臂各运动部件到特定位置,并记录这些特定关键位置坐标以方便控制程序自动读取这些坐标,并依据这些坐标生成移动轨迹;所述快速定位模块针对复杂的多臂关联运动,在基准坐标系中,通过简单设置多个轴的终点坐标,使机械臂各部件实现点到点的联动;所述手动模块单独移动机械臂各运动部件,完成位置调整;所述参数模块设置、指示和调节关键位置、控制数据,设定系统的工作状态、工作模式、工作标志,所述plc运算与监控模块通过逻辑运算,使各个功能模块按照既定的规则进行响应、运算、监控、报警;先收集平衡臂的长度、旋转臂的长度和升降臂的长度作为参数模块的参数之一,以随着时间变化平衡臂、旋转臂和升降臂的运动轨迹设定平衡臂、旋转臂和升降臂依次需要到达的几个位置,并对这些位置进行依次编号,在基准坐标系中,所述快速定位模块根据设定的位置自动按照编号顺序将平衡臂、旋转臂和升降臂移动到对应的坐标,通过可视化界面,所述示教模块在基准坐标系中根据所述快速定位模块的坐标显示平衡臂的位置、旋转臂的位置和升降臂的位置并记录坐标数据,然后将根据这些坐标作为参数模块的参数自动计算参数变化过程以推算出随着时间变化第一升降动力机构的工作流程、第二动力机构的工作流程和第三动力机构的工作流程,然后所述plc运算与监控模块根据平衡臂的长度、旋转臂的长度和升降臂的长度、参数模块的参数、参数变化过程以及第一升降动力机构的工作流程、第二动力机构的工作流程和第三动力机构的工作流程自动推算并编写对应的控制程序,最后触发所述装载模块和卸载模块根据控制程序控制机械臂的具体运动轨迹。
4、该系统设置有调试工作模式、自动工作模式、手动工作模式;所述调试工作模式在系统未进入正常工作状态的情况下,由专业技术人员对系统进行校正,由于调试模式下某些安全保护功能不一定开启,需要由指定技术人员进行操作;经过调试正常以后的设备,在控制系统的控制下,所述自动工作模式按规定的操作指令自动完成设置的功能;所述手动工作模式由人工完成所有动作指令,逐步实现所有动作指令。
5、所述参数模块包括模式设定单元、位置设定单元、数据设定单元、报警设定单元和状态设定单元,所述模式设定单元设置系统的当前工作模式,在程序自动运行时,所述位置设定单元设置机械臂各运动部件需要到达的位置,以方便自动读取,并执行到该位置,所述报警设定单元针对系统的数据和状态异常发出提示,中断动作,以便排除异常与故障,所述数据设定单元针对检测、保护的对比数据,根据数据范围判断工作状态,所述指示设定单元根据当前工作状态,以指示灯的方式显示出来,方便识别获取。
6、所述装载模块控制机械臂将晶圆盒从移载平台搬运到设备端平台的过程如下:先按下复位按键,复位按键按下后对机械臂各活动部件复位至初始位置校正,升降臂回到零点位置,装载模块可进入工作状态,代表装载模块的指示灯则亮起,按下装载模块的启动按键,代表装载模块的指示灯熄灭,在移载平台放置晶圆盒,所述机械臂将晶圆盒从移载平台搬运到设备端平台,所述平衡臂平移到移载平台的晶圆盒位置上方,所述升降臂下降,所述平衡臂随之下降,向下压紧并抓取晶圆盒,所述升降臂升高,所述平衡臂也随之升高,提起晶圆盒,所述平衡臂平移收回晶圆盒,所述旋转臂向设备端平台方向摆动后向设备端平台方向倾斜调整晶圆盒的位置,直到所述平衡臂平移到所述设备端平台的放置位上方,所述升降臂下降,所述平衡臂随之下降,最后平衡臂放下晶圆盒,所述机械臂将晶圆盒从设备端平台搬运到移载平台的过程中,代表装载模块的指示灯一直闪烁,该过程完成后,卸载模块可随时进入工作状态,代表卸载模块的指示灯亮起,按下代表卸载模块的启动按键,然后机械臂进入卸载晶圆盒的过程,卸载晶圆盒后,等待其他控制指令。
7、所述卸载模块控制机械臂将晶圆盒从设备端平台搬运到移载平台的过程如下:先按下复位按键,复位按键按下后对机械臂各活动部件复位至初始位置校正,所述升降臂接触触发式开关,卸载模块可进入工作状态,代表卸载模块的指示灯则亮起,按下卸载模块的启动按键,代表卸载模块的指示灯熄灭,所述平衡臂平移到设备端平台的晶圆盒位置上方,所述升降臂下降,所述平衡臂随之下降,向下压紧并抓取晶圆盒,所述升降臂升高,所述平衡臂也随之升高,提起晶圆盒,所述平衡臂平移收回晶圆盒,所述旋转臂向移载平台方向摆动后向移载平台方向倾斜调整晶圆盒的位置,直到所述平衡臂平移到所述移载平台的放置位上方,所述升降臂下降,所述平衡臂随之下降,最后平衡臂放下晶圆盒,卸载模块工作的过程中,代表卸载模块的指示灯一直闪烁,该过程完成后,装载模块可随时进入工作状态,代表装载模块的指示灯亮起,按下代表装载模块的启动按键,然后机械臂进入移载晶圆盒的过程,移载晶圆盒后,等待其他控制指令。
8、当机械臂各活动部件没有复位至初始位置校正、第一升降动力机构故障、第二动力机构故障、第三动力机构故障、机械臂各活动部件的位置碰到其他物体、机械臂超出行程、超出检测时间未检测到信号、晶圆盒摆放位置偏移,所述报警设定单元则启动报警指示灯示警。
9、本发明的一个目的在于提供一种操作简单、实用的采用所述晶圆移载路径控制系统的搬运装置。
10、一种采用所述晶圆移载路径控制系统的搬运装置,包括位于设备端平台一侧的机械臂和位于移载平台一侧的接料机构,所述设备端平台和移载平台之间设置有升降导轨架,所述机械臂包括从上而下依次连接在一起的平衡臂、旋转臂和升降臂,所述升降导轨架的底部设置有位于升降臂下方并可与升降臂接触的触发式开关,所述升降臂和第一升降动力机构安装在升降架上,所述升降架与升降导轨架滑动连接并沿着升降导轨架高度方向升降,所述升降臂在第一升降动力机构的驱动下升降,所述升降臂上的第二动力机构驱动所述旋转臂在所述升降臂的上方左右摆动,所述旋转臂上的第三动力机构驱动所述平衡臂在所述旋转臂的顶端左右摆动,所述接料机构包括与所述升降导轨架滑动连接并沿着升降导轨架高度方向的升降箱体、驱动升降箱体升降的第二升降动力机构以及位于升降箱体上的接料平台。
11、所述升降导轨架包括位于左右两侧的柱体,相邻的柱体相互隔开形成供所述旋转臂和升降臂穿过的窗口,所述柱体设置有与柱体隔开并沿着柱体高度方向延伸的滚珠丝杆,侧面开设有沿着其高度方向延伸的导轨槽,所述导轨槽固定安装有沿着柱体高度方向延伸的导轨,所述导轨与上滑块、下滑块滑动连接,所述上滑块位于所述下滑块的上方,所述下滑块的一端与所述导轨滑动连接,另一端通过第一通孔套在所述滚珠丝杆上,靠近窗口的一侧与所述升降架固定连接,所述滚珠丝杆还套设有位于所述下滑块下方的第一升降丝杠螺母和固定于第一升降丝杠螺母顶部的第一轴承,所述第一轴承的外环固定于所述下滑块另一端的第一通孔内侧,内环套在所述滚珠丝杆上;
12、所述上滑块的一端与所述导轨滑动连接,另一端通过第二通孔套在所述滚珠丝杆上,靠近窗口的一侧与所述升降箱体固定连接,所述滚珠丝杆还套设有位于所述滑块下方的第二升降丝杠螺母和位于第二升降丝杠螺母顶部的第二轴承,所述第二轴承的外环固定于所述上滑块另一端的第二通孔内侧,内环套在所述滚珠丝杆上。
13、所述第一升降动力机构包括固定于升降架上的第一动力电机,所述第一动力电机的输出轴通过传动带与所述第一升降丝杠螺母传动连接。
14、所述第二动力机构包括横向设置的第二动力电机,所述第二动力电机的输出轴的一端与所述旋转臂的底端连接,所述第三动力机构设置在所述旋转臂的顶端,所述第三动力机构包括横向设置的第三动力电机,所述第三动力电机的输出轴与所述平衡臂的一端连接;所述第二升降动力机构包括固定在升降箱体上的第三动力电机,所述第三动力电机的输出轴的一端与旋转臂的一端连接,所述旋转臂的另一端与所述物料抓取臂铰接。
15、本发明的有益效果是:本发明根据机械臂的运动路径反向推导动力机构的工作过程,自动生成控制程序,无需使用者编程,可快速开发并调整控制系统,只要设置机械臂各运动部件的几个位置即可实现自动控制机械臂实现所需的运动路径,操作逻辑简单方便、实用、好用,而且采用中文,方便国内的使用者。
- 还没有人留言评论。精彩留言会获得点赞!