一种SMIF仿真转换方法、装置及半导体测量机台控制系统与流程
本发明实施例涉及半导体,尤其涉及一种smif仿真转换方法、装置及半导体测量机台控制系统。
背景技术:
1、半导体晶片从取料到运送到测试机台进行性能检测,都需在密闭无尘的条件下进行。传统以洁净室生产晶片的方式是将生产设备置于洁净室内。然而建设洁净室需要昂贵的建设成本,并且还需要额外的运营及净化服务成本以维护该设施。为了提高生产效率,降低晶片厂的建设和运营费用,标准机械界面(smif,standard mechanical interface)技术得以应用和推广;
2、smif技术的概念是将洁净室直接设置于设备中,通过将晶片封闭在一个洁净的环境中,同时放宽对这个封闭环境以外的洁净度要求来防止产品被污染。smif技术由三部分组成:用来封闭在制造过程中存储和运输盒装半导体晶片的集装箱,即smif晶片盒;用来打开smif晶片盒的输入输出装置,即smif装载端口;以及从晶片取料、运送到测试机台进行性能检测到晶片放料的自动化材料加工系统;
3、smif技术的工作方式通常如下:自动化材料加工系统(amhs,automated,material,handling,system)将smif晶片盒送至smif装载端口;当自动批次跟踪系统鉴别出正确的产品批次正在装卸进正确的设备时,smif装载端口就自动打开smif晶片盒,机械手取出晶片,并将其置于洁净室中的设备,进行相应的性能检测制程;当该性能检测制程步骤完成时,该晶片就被机械手放回smif晶片盒中;即测试台性能检测载入口形态为smif标准机械接口;
4、然而,现有的smif晶片盒中的晶片尺寸较大,smif装载端口为8寸底开封闭式载具,较原来的open载具技术(open载具技术为机械手直接从开放的环境中取较小尺寸的晶片,并将其置于测量台进行相应的性能检测制程;当该制程步骤完成时,该晶片就被机械手放回取料原位;即测试台性能检测载入口形态为open开放载具形态)中的晶片较大,这样若测试台性能检测载入口形态仍采用open载具形态,即若采用open载具技术,会导致机械手行程不够,机械手无法顺利取放晶片,从而使得测试机台无法完成性能检测功能。
技术实现思路
1、本发明提供一种smif仿真转换方法、装置及半导体测量机台控制系统,实现了smif技术下测试机台性能检测功能,也实现测试台性能检测载入口形态从open开放载具形态改造为smif载具形态。
2、为达到以上目的,第一方面,本发明实施例提供了一种smif仿真转换方法,该方法包括:
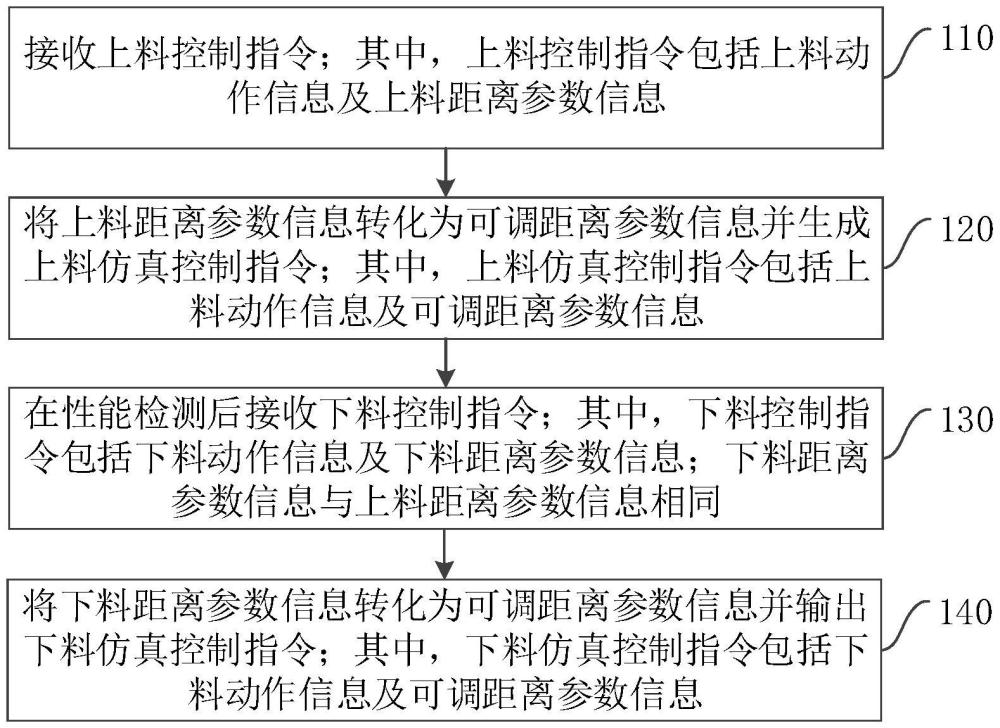
3、接收上料控制指令;其中,所述上料控制指令包括上料动作信息及上料距离参数信息;
4、将所述上料距离参数信息转化为可调距离参数信息并生成上料仿真控制指令;其中,所述上料仿真控制指令包括所述上料动作信息及所述可调距离参数信息;
5、在性能检测后接收下料控制指令;其中,所述下料控制指令包括下料动作信息及所述下料距离参数信息;其中,所述上料距离参数信息与所述下料距离参数信息相同;
6、将所述下料距离参数信息转化为可调距离参数信息并输出下料仿真控制指令;其中,所述下料仿真控制指令包括所述下料动作信息及所述可调距离参数信息。
7、可选的,将所述上料距离参数信息转化为可调距离参数信息并生成上料仿真控制指令之后,还包括:
8、将所述可调距离参数信息再转换为上料反馈距离参数信息,并输出上料反馈控制指令;其中,所述上料反馈控制指令包括上料动作信息及所述上料反馈距离参数信息;所述上料反馈距离参数信息与所述上料距离参数信息相同;
9、将所述下料距离参数信息转化为可调距离参数信息并输出下料仿真控制指令之后,还包括:
10、将所述可调距离参数信息再转换为下料反馈距离参数信息,并输出下料反馈控制指令;其中,所述下料反馈控制指令包括所述下料动作信息及所述下料反馈距离参数信息;所述下料反馈距离参数信息与所述下料距离参数信息相同。
11、第二方面,本发明实施例还提供了一种smif仿真转换模块,该模块包括:
12、第一接收模块,用于接收上料控制指令;其中,所述上料控制指令包括上料动作信息及上料距离参数信息;
13、第一转换模块,用于将所述上料距离参数信息转化为可调距离参数信息并生成上料仿真控制指令;其中,所述上料仿真控制指令包括所述上料动作信息及所述可调距离参数信息;
14、第二接收模块,用于在性能检测后接收下料控制指令;其中,所述下料控制指令包括下料动作信息及所述下料距离参数信息;其中,所述上料距离参数信息与所述下料距离参数信息相同;
15、第二转换模块,用于将所述下料距离参数信息转化为可调距离参数信息并输出下料仿真控制指令;其中,所述下料仿真控制指令包括所述下料动作信息及所述可调距离参数信息。
16、可选的,该模块还包括:
17、第一反馈模块,用于将所述可调距离参数信息再转换为上料反馈距离参数信息,并输出上料反馈控制指令;其中,所述上料反馈控制指令包括上料动作信息及所述上料反馈距离参数信息;所述上料反馈距离参数信息与所述上料距离参数信息相同;
18、第二反馈模块,用于将所述可调距离参数信息再转换为下料反馈距离参数信息,并输出下料反馈控制指令;其中,所述下料反馈控制指令包括所述下料动作信息及所述下料反馈距离参数信息;所述下料反馈距离参数信息与所述下料距离参数信息相同。
19、第三方面,本发明实施例还通过了一种smif半导体测量机台控制系统,该系统包括:smif晶片盒、工控模块、执行上述第二方面所述的smif仿真转换模块、机器人控制模块及机器人;
20、所述工控模块,用于输出上料控制指令至所述smif仿真转换模块;其中,所述上料控制指令包括上料动作信息及上料距离参数信息;
21、所述smif仿真转换模块,用于将所述上料距离参数信息转化为可调距离参数信息并输出上料仿真控制指令至所述机器人控制模块;其中,所述上料仿真控制指令包括所述上料动作信息及所述可调距离参数信息;
22、所述机器人控制模块,用于根据所述上料仿真控制指令控制所述机器人从所述smif晶片盒中进行取料;
23、所述工控模块,用于在性能检测后输出下料控制指令至所述smif仿真转换模块;其中,所述下料控制指令包括下料动作信息及所述下料距离参数信息;其中,所述上料距离参数信息与所述下料距离参数信息相同;
24、所述smif仿真转换模块,用于将所述下料距离参数信息转化为可调距离参数信息并输出下料仿真控制指令至所述机器人控制模块;其中,所述下料仿真控制指令包括所述下料动作信息及所述可调距离参数信息;
25、所述机器人控制模块,用于根据所述下料仿真控制指令控制所述机器人将晶片放至在所述smif晶片盒中。
26、可选的,所述smif仿真转换模块,还用于将所述可调距离参数信息再转换为上料反馈距离参数信息,并输出上料反馈控制指令至所述工控模块;其中,所述上料反馈控制指令包括上料动作信息及所述上料反馈距离参数信息;所述上料反馈距离参数信息与所述上料距离参数信息相同;
27、所述smif仿真转换模块,还用于将所述可调距离参数信息转换为下料反馈距离参数信息并输出下料反馈控制指令至所述工控模块;其中,所述下料反馈控制指令包括所述下料动作信息及所述下料反馈距离参数信息;所述下料反馈距离参数信息与所述下料距离参数信息相同。
28、可选的,该系统还包括:所述smif装载端口;所述smif装载端口,用于装载所述smif晶片盒;
29、所述工控模块,还用于输出开盒指令至所述smif装载端口以使所述smif装载端口将所述smif晶片盒打开;其中,所述开盒指令包括开盒动作信息及开盒距离参数信息;所述开盒距离参数信息与所述可调距离参数信息相同;
30、所述工控模块,还用于输出闭盒指令至所述smif装载端口以使所述smif装载端口将所述smif晶片盒闭合;其中,所述闭盒指令包括闭盒动作信息及闭盒距离参数信息;所述闭盒距离参数信息与所述可调距离参数信息相同。
31、可选的,所述工控模块,还用于输出预对位指令至所述机器人控制模块;
32、所述机器人控制模块,用于根据所述预对位指令控制所述机器人将晶片放至预对位位置处进行预对位;其中,所述预对位指令包括预对位动作信息及预对位距离参数信息;所述预对位距离参数信息、所述上料距离参数信息及所述下料距离参数信息相同。
33、可选的,所述smif仿真转换模块的型号为:ma84g564。
34、可选的,所述工控模块的型号为:flx5000。
35、本发明实施例,通过接收上料控制指令;其中,上料控制指令包括上料动作信息及上料距离参数信息;将上料距离参数信息转化为可调距离参数信息并生成上料仿真控制指令;其中,上料仿真控制指令包括上料动作信息及可调距离参数信息;在性能检测完成后接收下料控制指令;其中,下料控制指令包括下料动作信息及下料距离参数信息;其中,上料距离参数信息与下料距离参数信息相同;将下料距离参数信息转化为可调距离参数信息并输出下料仿真控制指令;其中,下料仿真控制指令包括下料动作信息及可调距离参数信息,如此通过上料仿真控制指令及下料仿真控制指令,实现了smif技术下的上料过程,并在上料完成后测量台自动进行性能检测,同时在性能检测后实现了下料过程,如此满足smif技术下测试机台性能检测功能,实现了测试台性能检测载入口形态从open开放载具形态改造为smif载具形态。
- 还没有人留言评论。精彩留言会获得点赞!