一种钟罩式电池静置的控制方法及系统与流程
本发明涉及电池静置,具体涉及一种钟罩式电池静置的控制方法及系统。
背景技术:
1、随着新能源产业的快速发展,锂电池作为其核心动力源,其生产效率与品质保障显得尤为重要。在锂电池的生产过程中,电池静置是一个必不可少的环节,主要用于稳定电池内部化学反应,提高电池的性能和安全性。钟罩机作为一种专用的设备,在电池静置过程中发挥着关键作用。它采用封闭的钟罩结构,将待静置的电池置于其中,通过精确控制钟罩内的温度、湿度、压力等环境参数,为电池提供一个稳定且适宜的静置环境。
2、尽管现有的钟罩机在电池静置过程中发挥了重要作用,但其控制方法仍存在一定的局限性。其一、钟罩机整体工艺自动化程度低,在电池静置过程中需要大量的人工干预,如手动调节环境参数、监控设备运行状态等,这不仅增加了人力成本,也降低了生产效率和产品质量的稳定性。其二、现有的控制方法在系统稳定性方面存在不足,可能存在设备在锁紧、施加正负压等关键环节中出现不稳定的情况,例如,由于设备锁紧故障使钟罩机的气密性不足,影响电池静置效果,甚至可能导致安全事故。
技术实现思路
1、为了克服上述现有技术的缺陷,本发明提供了一种钟罩式电池静置的控制方法及系统,通过自动化控制以及延时预设时间执行下一个操作的控制,不但实现了钟罩机的精确操作,提高了电池静置的效率,而且还使每个过程中系统的气密性良好,提高了设备的稳定性、安全性。
2、具体技术方案如下所示:
3、一种钟罩式电池静置的控制方法,应用于钟罩机,所述钟罩机包括底座和可移动的罩体,且在所述罩体置于所述底座上时,所述罩体与所述底座共同构成密闭的静置空间;
4、所述控制方法包括:
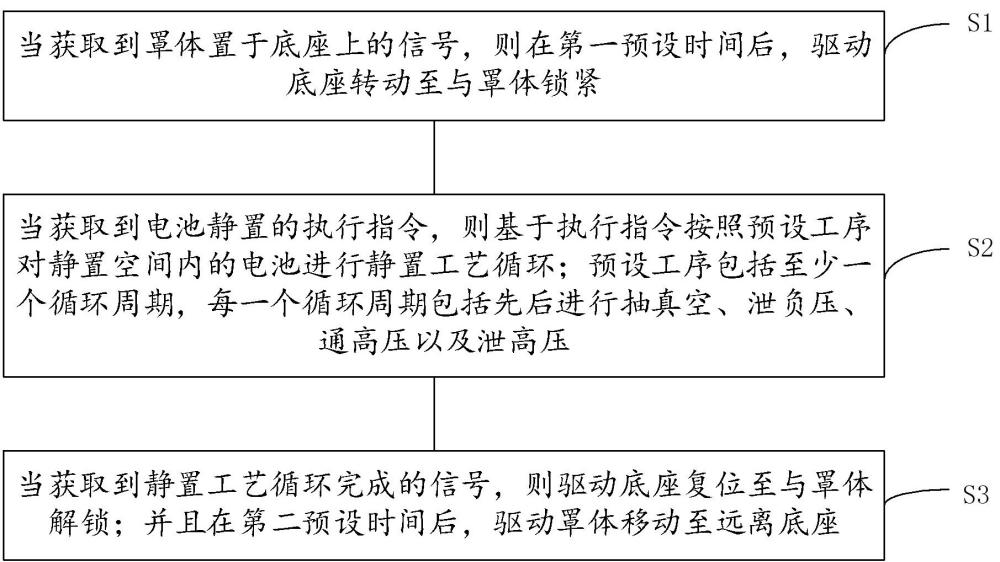
5、当获取到所述罩体置于所述底座上的信号,则在第一预设时间后,驱动所述底座转动至与所述罩体锁紧;
6、当获取到电池静置的执行指令,则基于所述执行指令按照预设工序对所述静置空间内的电池进行静置工艺循环;所述预设工序包括至少一个循环周期,每一个所述循环周期包括先后进行抽真空、泄负压、通高压以及泄高压;
7、当获取到静置工艺循环完成的信号,则驱动所述底座复位至与所述罩体解锁;并且在第二预设时间后,驱动所述罩体移动至远离所述底座。
8、在一个具体实施例中,对所述静置空间内的电池进行通高压包括:
9、获取所述静置空间的目标高压值;
10、对所述静置空间施加第一次的高压,使所述静置空间在第三预设时间达到第一次的高压值;
11、延时第四预设时间后,对所述静置空间施加下一次的高压,使所述静置空间在所述第三预设时间达到下一次的高压值;
12、重复多次在延时所述第四预设时间后对所述静置空间施加高压,以使下一次的高压值大于上一次的高压值,并且在所述静置空间的当前气压值达到所述目标高压值时停止,以使所述静置空间的压力值呈现阶梯式变化。
13、在一个具体实施例中,对所述静置空间内的电池进行抽真空包括:
14、获取所述静置空间的目标负压值;
15、对所述静置空间施加第一次的负压,使所述静置空间在第三预设时间达到第一次的负压值;
16、延时第四预设时间后,对所述静置空间施加下一次的负压,使所述静置空间在所述第三预设时间达到下一次的负压值;
17、重复多次在延时所述第四预设时间后对所述静置空间施加负压,以使下一次的负压值小于上一次的负压值,并且所述静置空间的当前气压值达到目标负压值时停止,以使所述静置空间的压力值呈现下降式的阶梯式变化。
18、在一个具体实施例中,所述在第一预设时间后,驱动所述底座转动至与所述罩体锁紧之前包括:
19、基于所述第一预设时间抽取所述静置空间的内部气体,以使所述静置空间的气压达到锁紧时所对应的预设气压值;
20、所述控制方法还包括:
21、基于所述第一预设时间判断所述静置空间的气压是否达到预设气压值,若所述静置空间的气压未达到预设气压值,则生成第一报警指令,以基于所述第一报警指令进行报警警示。
22、在一个具体实施例中,所述底座上设有气缸,所述底座上具有第一锁定件,所述罩体上具有与所述第一锁定件配合的第二锁定件,所述第一锁定件被配置为由所述气缸驱动转动以锁定于所述第二锁定件,或转动复位以解锁于所述第二锁定件;
23、所述在第一预设时间后,驱动所述底座转动至与所述罩体锁紧包括:
24、在第一预设时间后,基于所述罩体的当前位置与所述罩体的目标位置生成驱动指令,并基于所述驱动指令驱动所述气缸带动所述底座转动,以使所述第一锁定件转动至锁定于所述第二锁定件。
25、在一个具体实施例中,所述在第二预设时间后,驱动所述罩体移动至远离所述底座之前包括:
26、判断所述静置空间与外界之间的气压差是否在预设区间内;
27、若所述气压差超出所述预设区间,则基于所述气压差生成通气指令,以基于所述通气指令对所述静置空间输入外界气体,直至所述气压差位于所述预设区间内。
28、在一个具体实施例中,所述底座的外围设有第一图像获取装置和第二图像获取装置,所述第一图像获取装置的拍摄方向与所述第二图像获取装置的拍摄方向垂直;
29、所述控制方法包括:
30、当检测到用于放置电池的托盘进入所述底座的信号时,则基于所述第一图像获取装置采集托盘的第一实测图像,并基于所述第二图像获取装置采集托盘的第二实测图像;
31、根据所述第一实测图像和第一预设图像进行比对,以及根据所述第二实测图像和第二预设图像进行比对,判断托盘是否完全位于所述底座内,
32、若托盘完全位于所述底座内,则驱动所述罩体下降;
33、否则,则生成第二报警指令,以基于所述第二报警指令进行报警警示。
34、在一个具体实施例中,每一抽真空、泄负压、通高压以及泄高压的工序均各自对应有预设的目标值,
35、所述控制方法还包括:
36、在执行下一个工序之前,判断所述静置空间的当前气压值是否符合当前工序对应的预设目标值;
37、若不符合,则生成第三报警指令,以基于所述第三报警指令进行报警警示。
38、一种钟罩式电池静置的控制系统,应用于钟罩机,所述钟罩机包括底座和可移动的罩体,且在所述罩体置于所述底座上时,所述罩体与所述底座共同构成密闭的静置空间;
39、所述控制系统包括:
40、锁紧模块,用于当获取到所述罩体置于所述底座上的信号,则在第一预设时间后,驱动所述底座转动至与所述罩体锁紧;
41、静置模块,用于当获取到电池静置的执行指令,则基于所述执行指令按照预设工序对所述静置空间内的电池进行静置工艺循环;所述预设工序包括至少一个循环周期,每一个所述循环周期包括先后进行抽真空、泄负压、通高压以及泄高压;
42、复位模块,用于当获取到静置工艺循环完成的信号,则驱动所述底座复位至与所述罩体解锁;并且在第二预设时间后,驱动所述罩体移动至远离所述底座。
43、在一个具体实施例中,所述静置模块包括:
44、高压值获取模块,用于获取所述静置空间的目标高压值;
45、高压模块,用于对所述静置空间施加第一次的高压,使所述静置空间在第三预设时间达到第一次的高压值;延时第四预设时间后,对所述静置空间施加下一次的高压,使所述静置空间在所述第三预设时间达到下一次的高压值;重复多次在延时所述第四预设时间后对所述静置空间施加高压,以使下一次的高压值大于上一次的高压值,并且在所述静置空间的当前气压值达到所述目标高压值时停止,以使所述静置空间的压力值呈现阶梯式变化;
46、所述锁紧模块包括:
47、抽气模块,用于当获取到所述罩体置于所述底座上的信号,则基于所述第一预设时间抽取所述静置空间的内部气体,以使所述静置空间的气压达到锁紧时所对应的预设气压值;
48、第一驱动模块,用于在静置空间的气压达到锁紧时所对应的预设气压值时,驱动所述底座转动至与所述罩体锁紧;
49、所述复位模块包括:
50、第二驱动模块,用于当获取到静置工艺循环完成的信号,则驱动所述底座复位至与所述罩体解锁;
51、通气模块,用于判断所述静置空间与外界之间的气压差是否在预设区间内;若所述气压差超出所述预设区间,则基于所述气压差生成通气指令,以基于所述通气指令对所述静置空间输入外界气体,直至所述气压差位于所述预设区间内;
52、打开模块,用于所述静置空间与外界之间的气压差位于所述预设区间时,驱动所述罩体移动至远离所述底座。
53、本发明至少具有以下有益效果:
54、本发明提供了一种钟罩式电池静置的控制方法,应用于钟罩机,钟罩机包括底座和可移动的罩体,且在罩体置于底座上时,罩体与底座共同构成密闭的静置空间;控制方法包括:当获取到罩体置于底座上的信号,则在第一预设时间后,驱动底座转动至与罩体锁紧;当获取到电池静置的执行指令,则基于执行指令按照预设工序对静置空间内的电池进行静置工艺循环;预设工序包括至少一个循环周期,每一个循环周期包括先后进行抽真空、泄负压、通高压以及泄高压;当获取到静置工艺循环完成的信号,则驱动底座复位至与罩体解锁;并且在第二预设时间后,驱动罩体移动至远离底座。本技术通过在延时第一预设时间再执行锁紧操作,便于在锁紧前对罩体的位置或者是静置空间的气压进行调整,以使罩体和底座之间的连接紧密,提高系统的安全性和稳定性;其次,本技术按照抽真空、泄负压、通高压和泄高压等工序循环进行,不同规模的电池对应不同的循环周期,可以使不同规模的电池内的电解液充分浸润,从而提高电池的性能;最后,通过延时第二预设时间再执行打开罩体的操作,便于在打开罩体前调整静置空间与外界两者的气压差,从而有效避免静置空间与外界两者的气压差给钟罩机带来损坏的问题,进而提高钟罩机的使用寿命。本技术的控制方法通过自动化控制和延时处理的控制,不但实现了钟罩机的精确操作,提高了电池静置的效率,而且还使每个过程中系统的气密性良好,提高了设备的稳定性、安全性。
55、进一步的,对静置空间内的电池进行通高压包括:获取静置空间的目标高压值;对静置空间施加第一次的高压,使静置空间在第三预设时间达到第一次的高压值;延时第四预设时间后,对静置空间施加下一次的高压,使静置空间在第三预设时间达到下一次的高压值;重复多次在延时第四预设时间后对静置空间施加高压,以使下一次的高压值大于上一次的高压值,并且在静置空间的当前气压值达到目标高压值时停止,以使静置空间的压力值呈现阶梯式变化。本技术通过多次对静置空间以及静置空间的电池施加高压直至达到目标高压值,以对电池起到一定的保护作用,避免电池一次性施加高压到目标高压值出现受压过大而出现鼓包现象,从而使电池达到更良好的浸润效果,进而提高电池的性能和质量。
56、进一步的,在第一预设时间后,驱动底座转动至与罩体锁紧之前包括:基于第一预设时间抽取静置空间的内部气体,以使静置空间的气压达到锁紧时所对应的预设气压值;控制方法还包括:基于第一预设时间判断静置空间的气压是否达到预设气压值,若静置空间的气压未达到预设气压值,则生成第一报警指令,以基于第一报警指令进行报警警示。本技术在驱动底座转动至与罩体锁紧之前还需要对静置空间进行抽气处理,以使静置空间的气压达到锁紧时所对应的预设气压值,一方面,锁紧前的抽气处理可以检测罩体和底座之间的气密性,另一方面,通过抽气处理可以使罩体和底座的贴合更加紧密,便于后续锁紧操作,从而提高系统的安全性、稳定性。
57、进一步的,在第二预设时间后,驱动罩体移动至远离底座之前包括:判断静置空间与外界之间的气压差是否在预设区间内;若气压差超出预设区间,则基于气压差生成通气指令,以基于通气指令对静置空间输入外界气体,直至气压差位于预设区间内。本技术通过在驱动罩体移动至远离底座之前,先判断静置空间与外界之间的气压差是否在预设区间内;若气压差超出预设区间,则基于气压差生成通气指令,以基于通气指令对静置空间输入外界气体,直至气压差位于预设区间内,有效避免静置空间与外界两者的气压差给钟罩机带来损坏的问题,进而提高钟罩机的使用寿命,使系统更加安全可靠。
- 还没有人留言评论。精彩留言会获得点赞!