机器人对接机构及对接机器人的制作方法
本发明涉及机器人,特别是涉及一种机器人对接机构及对接机器人。
背景技术:
1、机器人是指一种机器人系统,它通常由两个轮子或轮子组成的轮子组件组成。这种设计使得机器人能够在水平表面上移动,并且可以通过不同轮速的控制来实现转向和转动。双轮机器人通常使用差速驱动系统,通过独立控制每个轮子的速度,可以实现机器人的前进、后退、转弯等各种运动。此外,双轮机器人还可以通过控制轮子的速度差来实现旋转运动,这使得它们非常灵活并且适用于狭窄的空间和复杂的环境。
2、现有的机器人在使用中,没有将两台机器人自动对接传输数据的结构。现有需要连接两台机器人都是通过人工使用数据线进行连接传输,连接较为繁琐,使用不便。因此需要针对现有的机器人连接。
技术实现思路
1、为解决上述问题,本发明具有稳固可靠的对接连接、精准的配合与接触、便捷的操作与维护、高效的安全保障以及适用性广泛等效果,为机器人和自动化设备的对接提供了可靠、安全和高效的解决方案的机器人对接机构及对接机器人。
2、本发明所采用的技术方案是:一种机器人对接机构,包括对接母座以及对接头座,所述对接母座包括插接套筒、第一对接连接器以及插接锁制组件,所述插接套筒设置有插接腔,所述第一对接连接器设置在插接腔内,所述插接锁制组件设置在插接腔的外侧;所述对接头座包括插接头、第二对接连接器、对插锁制组件以及锁制驱动组件,所述插接头设置有配合腔,所述第二对接连接器设置在配合腔内,所述插接头用于插入至插接腔内,以使得第一对接连接器与第二对接连接器接触;所述锁制驱动组件用于驱动对插锁制组件与插接锁制组件配合,以将插接头保持在插接腔内。
3、对上述方案的进一步改进为,所述插接套筒的开口处设置有扩张部,所述扩张部朝向外侧扩张,所述插接套筒靠近扩张部的一侧设置有导入块,所述导入块设置有多个,多个导入块呈环形均布在插接套筒的内周;所述插接头的外周呈环向均布有多个引导块,相邻两个引导块之间形成有引导槽,所述引导槽用于配合导入块。
4、对上述方案的进一步改进为,所述导入块与引导块的相对一侧均设置有引导斜面;所述插接头朝向插接套筒的一端设置有插入斜面。
5、对上述方案的进一步改进为,所述第一对接连接器包括第一基板、第一对接外壳、接触槽以及导电接触盘,所述接触槽的外周设置有密封圈,所述第一对接外壳设置在第一基板上,所述接触槽设置在第一对接外壳上,所述导电接触盘设置在第一基板上,并朝向接触槽。
6、对上述方案的进一步改进为,所述第二对接连接器包括第二基板、第二对接外壳、接触插头以及导电探针,所述第二基板设置在第二对接外壳的一侧,所述接触插头设置在第二对接外壳上,所述导电探针设置在接触插头内;所述接触插头的外周设置有密封压环,所述接触插头用于配合在接触槽上,所述导电探针用于接触导电接触盘;所述密封压环用于配合密封圈,以对接触插头和接触槽进行密封。
7、对上述方案的进一步改进为,所述插接锁制组件包括锁制定位元件以及锁制插槽,所述插接头设置有锁制定位槽,所述锁制定位元件用于配合锁制定位槽,以对插接头定位;所述对插锁制组件设置有锁舌,所述锁制驱动组件用于驱动锁舌朝向锁制插槽插入。
8、对上述方案的进一步改进为,所述锁制定位元件的一端伸入插接腔内,当插接头插入插接腔内时,对锁制定位元件挤压朝外移动对插接头施加预紧力,直至配合到锁制定位槽。
9、对上述方案的进一步改进为,所述锁制驱动组件包括旋转驱动元件、驱动主轴、转盘以及驱动齿盘,所述插接头设置有空腔,所述空腔内设置有轴承,所述驱动主轴可转动设置在轴承上,所述旋转驱动元件用于带动驱动主轴旋转,所述转盘设置在驱动主轴的一端,所述驱动齿盘设置在转盘上,所述驱动齿盘为螺旋式齿盘,所述锁舌的一面设置有螺旋齿槽,所述螺旋齿槽用于配合驱动齿盘;所述插接头的外侧设置有滑槽,所述驱动齿盘用于驱动螺旋齿槽,以带动锁舌在滑槽上滑动,使得锁舌插入至锁制插槽。
10、对上述方案的进一步改进为,所述空腔的外侧设置有定位台阶,所述定位台阶上安装有定位环,所述定位环用于对轴承的端面固定在空腔内,所述驱动主轴的一端设置有固定螺帽,所述固定螺帽用于将主轴的一端锁紧配合在轴承上。
11、对上述方案的进一步改进为,还包括拔出助力组件,所述插接头的一端设置有固定盘,所述拔出助力组件包括连接柱、助力压环以及助力弹簧,所述连接柱的一端设置在固定盘上,所述助力压环可滑动设置在连接柱上,所述助力弹簧设置在连接柱上,并用于助力压环施加压力,所述助力压环设置有托板,所述托板的一端用于抵接插接套筒的端面。
12、对上述方案的进一步改进为,所述固定盘靠近插接头的外周设置有沉槽,所述插接头插入至插接腔后,插接套筒的端面用于将托板压入至沉槽内。
13、对上述方案的进一步改进为,还包括棘轮连接机构,所述棘轮连接机构包括拉力元件、棘轮座、棘爪以及棘齿座,所述插接套筒的壁面设置有棘轮槽,所述棘轮槽贯通至插接腔,所述棘轮座设置在棘轮槽内,所述棘轮座设置有铰接槽,所述铰接槽用于铰接棘爪,所述拉力元件的一端与棘爪连接,以给棘爪提供铰接拉力;所述棘齿座设置在插接头上,所述棘齿座设置有齿槽,以配合棘爪。
14、对上述方案的进一步改进为,所述插接套筒设置有连接台,所述连接台设置有连接元件,所述拉力元件的一端与连接元件连接、另一端与棘爪连接。
15、对上述方案的进一步改进为,所述拉力元件为拉力弹簧,所述铰接槽的壁面设置有铰接定位槽,所述棘爪的两侧设置有铰接轴,所述铰接轴的一端伸入至铰接定位槽内;所述棘爪包括拉力连接端和棘轮连接端,所述铰接轴设置在拉力连接端和棘轮连接端之间,所述拉力连接端用于连接拉力元件,所述棘轮连接端用于配合齿槽。
16、对上述方案的进一步改进为,所述拉力连接端与棘轮连接端之间形成一夹角。
17、对上述方案的进一步改进为,所述插接头设置有棘轮安装槽,所述棘齿座设置在棘轮安装槽内,所述棘齿座位于齿槽的一侧设置有避空位。
18、对上述方案的进一步改进为,还包括方向活动机构,所述方向活动机构设置在对接母座的一面,并用于对接母座提供方向浮动力。
19、对上述方案的进一步改进为,所述方向活动机构包括母座基板、活动基板、活动导轨以及活动拉力组件,所述母座基板的一面与对接母座连接,所述活动基板通过活动导轨与母座基板连接,所述活动拉力组件包括活动拉力弹簧,所述活动拉力弹簧的两端设置有两个拉力轴,两个所述拉力轴分别连接活动基板和母座基板;所述活动拉力组件设置有两组,两组所述活动拉力组件分别设置在活动基板的两侧。
20、对上述方案的进一步改进为,所述方向活动机构设置有两组,两组所述方向活动机构的活动轨道方向呈十字分布。
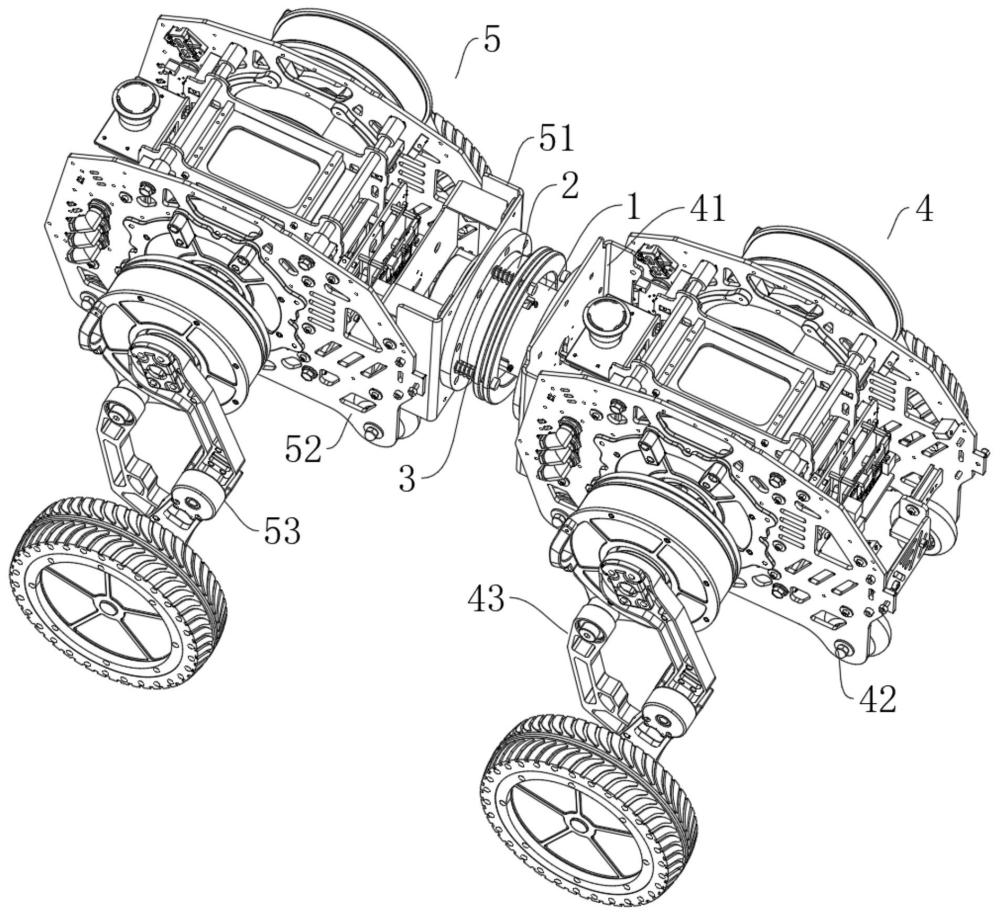
21、一种对接机器人,包括所述的机器人对接机构;所述对接机器人包括第一机器人以及第二机器人;所述第一机器人的一端设置有第一支架,所述对接母座设置在第一支架内,所述第二机器人的一端设置有第二支架,所述对接头座设置在第二支架上;所述第一机器人设置有第一机身,所述第一机身的两侧设置有第一行驶模组,所述第一支架设置在第一机身上;所述第二机器人设置有第二机身,所述第二机身的两侧设置有第二行驶模组,所述第二支架设置在第二机身上。
22、本发明有益效果是:
23、相比现有的机器人连接,本发明用于两台机器人对接传输,可以进行电气连接、通讯连接、电力传输等。对接母座为固定端,对接头座为活动端。通过插接套筒、插接头、对接连接器以及插接锁制组件等设计,该对接机构能够实现稳固可靠的对接连接,确保机器人或设备之间的连接安全性和稳定性,适用于各种工业场景和应用环境。插接头与插接腔内的第一对接连接器、第二对接连接器能够实现精准的配合与接触,使得机器人对接过程更加顺畅和精确,减少因对接不良造成的损坏和故障。设计中考虑了锁制驱动组件用于驱动对插锁制组件与插接锁制组件配合,这样的设计使得对接机构的操作和维护更加便捷,提高了设备的可操作性和维护效率。通过插接锁制组件与对插锁制组件的配合,能够实现对插接头的有效锁定,从而提供了高效的安全保障措施,防止在使用过程中产生意外脱落或松动。对接机构方案适用于各种机器人、自动化设备等的对接需求,可灵活应用于工业生产线、物流装备等领域,具有较强的通用性和适用性。本发明具有稳固可靠的对接连接、精准的配合与接触、便捷的操作与维护、高效的安全保障以及适用性广泛等多项技术效果,为机器人和自动化设备的对接提供了可靠、安全和高效的解决方案。
24、棘轮连接机构,用于对接母座和对接头座连接时起到插接止退作用。当插接头插入至插接腔之时,棘爪与棘轮槽配合,插接头不会后移,直至插入至最内部后,棘爪被拉力元件拉回到原始位置方可进行后退松开。使得棘轮对插过程中稳定性更好,插入过程中不会出现后退现象。解决了现有对接过程中容易出现后移的现象。通过插接头插入至插接套筒的插接腔内,实现了头座接电组件与母座接电组件的可靠导电连接,确保了连接器的稳定性和电气传输的可靠性。采用了棘轮连接机构,通过棘轮座、棘爪和棘齿座的设计,实现了连接器的灵活插拔和固定,使得连接操作更加便捷和可靠。连接器采用了拉力元件与棘爪的连接方式,能够提供稳定的铰接拉力,从而增强了连接器的耐用性和稳定性,延长了使用寿命。连接器结构稳固,插拔过程中不易产生松动或断开,有利于保障连接器的安全使用,降低了意外断开的风险。
25、一种对接机器人,通过将对接母座设置在第一支架内、对接头座设置在第二支架上,结合前述对接机构的稳固可靠性,实现了对接机器人之间的平稳牢固的对接连接,保证了机器人在联合作业时的稳定性和安全性。第一机器人的第一行驶模组与第二机器人的第二行驶模组相互配合,使得两个机器人能够在不同方向上进行运动协同,从而提高了整体的灵活性和工作范围。第一机身的设置和第一行驶模组的布置以及第一支架的安装,以及第二机身和第二行驶模组的布置和第二支架的设置等设计,使得整个对接机器人结构紧凑,有利于在狭窄空间中的操作和应用。两个机器人之间的对接连接紧密可靠,使得它们可以有效地电气、通讯数据等传输,可以协同作业,提高了生产效率和工作质量。本发明具备平稳牢固的对接连接、多维运动协同、整体结构紧凑、高效的协同作业以及易于维护和管理等多项技术效果,为机器人在协同作业和联合运动方面提供了可靠、高效的解决方案。
- 还没有人留言评论。精彩留言会获得点赞!