调平压合设备校准方法、装置、调平压合设备及存储介质与流程
本技术实施例涉及自动化领域,尤其涉及一种调平压合设备校准方法、装置、调平压合设备及存储介质。
背景技术:
1、晶圆键合是一种在半导体制造中广泛应用的封装技术,它通过特定的工艺条件将两片或多片半导体晶片紧密结合并形成一个整体,这种技术不仅能够实现不同材料、不同功能层之间的集成,还能提高器件的性能和可靠性。现有技术中,micro led激光键合设备利用高能量激光束作为热源的键合方式得到了广泛应用。micro led激光键合设备中的调平压合设备结合了调平和压合两种功能,调平功能是指对工件进行多向加工,以消除其表面的不平整或变形,达到所需的平整度;而压合功能则是指利用压力将两个或多个工件紧密结合在一起,形成一个整体。调平压合设备在晶圆的加工过程中起到了至关重要的作用。
2、然而,现有技术中的调平压合设备一般为两轴调平压合设备,两轴调平压合设备在压合过程中,存在压合翘曲,压合受力分布不均等问题,导致晶圆的加工精度差,良品率低。
技术实现思路
1、本发明实施例提供了一种调平压合设备校准方法、装置、调平压合设备及存储介质,解决了现有技术中两轴调平压合设备在压合过程中存在压合翘曲,压合受力分布不均等问题,导致晶圆的加工精度差,良品率低的技术问题。
2、第一方面,本发明实施例提供了一种调平压合设备校准方法,所述方法适用于调平压合设备,所述调平压合设备包括上玻璃基板和下玻璃基板,所述上玻璃基板的下表面和所述下玻璃基板的上表面用于吸附晶圆,所述上玻璃基板的上表面四周均匀间隔开地设置有四个电机,且所述上玻璃基板上存在与每个电机的距离均相同的中心点,所述电机用于驱动上玻璃基板向所述下玻璃基板所在的位置移动以实现压合功能,所述方法包括:
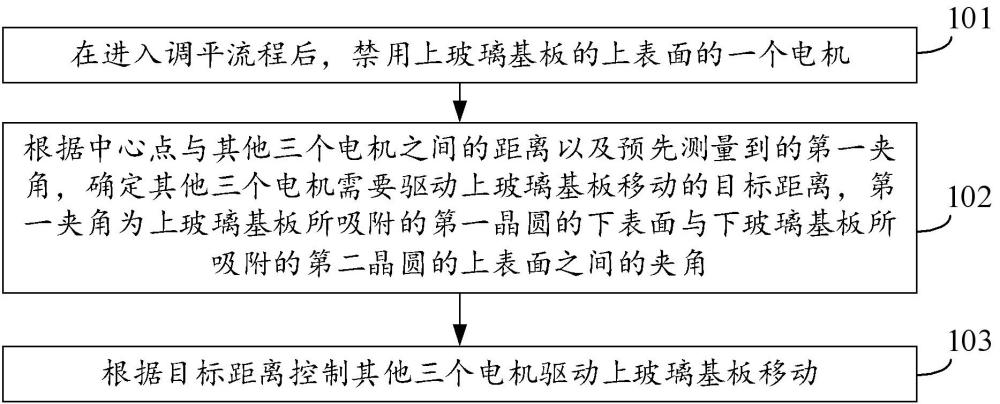
3、在进入调平流程后,禁用所述上玻璃基板的上表面的一个电机;
4、根据所述中心点与其他三个电机之间的距离以及预先测量到的第一夹角,确定所述其他三个电机需要驱动所述上玻璃基板移动的目标距离,所述第一夹角为所述上玻璃基板所吸附的第一晶圆的下表面与所述下玻璃基板所吸附的第二晶圆的上表面之间的夹角;
5、根据所述目标距离控制所述其他三个电机驱动所述上玻璃基板移动。
6、其中,所述调平压合设备还包括z轴驱动单元以及激光测距仪,所述z轴驱动单元用于带动所述激光测距仪移动,所述第一夹角预先通过以下方式测量得到:
7、通过控制所述z轴驱动单元移动所述激光测距仪,使所述激光测距仪的测距焦点聚焦在所述上玻璃基板所吸附的第一晶圆的下表面上;
8、控制所述上玻璃基板在水平方向上进行移动,以通过所述激光测距仪测量所述第一晶圆的下表面上三个不同位置的点的第一高度,根据所述第一高度确定三个点的第一坐标;
9、通过控制所述z轴驱动单元移动所述激光测距仪,使所述激光测距仪的测距焦点聚焦在所述下玻璃基板所吸附的第二晶圆的上表面上;
10、控制所述下玻璃基板在水平方向上进行移动,以通过所述激光测距仪测量所述第二晶圆的上表面上三个不同位置的点的第二高度,根据所述第二高度确定三个点的第二坐标;
11、根据所述第一坐标和所述第二坐标,确定所述第一晶圆的下表面与所述第二晶圆的上表面之间的第一夹角。
12、其中,所述根据所述第一坐标和所述第二坐标,确定所述第一晶圆的下表面与所述第二晶圆的上表面之间的第一夹角,包括:
13、根据所述第一坐标,确定所述第一晶圆的下表面的第一法向量;
14、根据所述第二坐标,确定所述第二晶圆的上表面的第二法向量;
15、根据所述第一法向量和所述第二法向量,确定所述第一晶圆的下表面与所述第二晶圆的上表面之间的第一夹角。
16、其中,所述根据所述中心点与所述其他三个电机之间的距离以及预先测量到的第一夹角,确定所述其他三个电机需要驱动所述上玻璃基板移动的目标距离,包括:
17、根据所述预先测量到的第一夹角,确定所述第一晶圆的下表面的投影与所述第二晶圆的上表面在x轴方向上的夹角和在y轴方向上的夹角;
18、根据所述中心点与所述其他三个电机之间的距离、所述在x轴方向上的夹角和所述在y轴方向上的夹角,确定所述其他三个电机需要驱动所述上玻璃基板移动的目标距离。
19、其中,所述根据所述中心点与所述其他三个电机之间的距离、所述在x轴方向上的夹角和所述在y轴方向上的夹角,确定所述其他三个电机需要驱动所述上玻璃基板移动的目标距离,包括:
20、根据所述中心点与所述其他三个电机之间的距离以及所述在x轴方向上的夹角,确定所述其他三个电机中与位置相对的电机的连线方向在x轴方向上的电机所需要驱动所述上玻璃基板所移动的距离;
21、根据所述中心点与所述其他三个电机之间的距离以及所述在y轴方向上的夹角,确定所述其他三个电机中与位置相对的电机的连线方向在y轴方向上的电机所需要驱动所述上玻璃基板所移动的距离;
22、其中,位于同一方向上的两个电机的移动方向相反。
23、其中,所述方法还包括:
24、在所述上玻璃基板移动后,确定所述第一晶圆的下表面与所述第二晶圆的上表面之间的第二夹角;
25、在所述第二夹角满足预设条件的情况下,确定所述调平压合设备校准完成;
26、在所述第二夹角的角度不满足所述预设条件的情况,根据所述第二夹角更新所述第一夹角并进入新的调平流程,所述新的调平流程中所禁用的电机为在历史的调平流程中尚未被禁用的电机;
27、在禁用完所有电机且所述调平压合设备没有校准完成的情况下,结束校准流程并发出校准失败提示。
28、其中,所述预设条件为所述第二夹角在预设角度范围内。
29、第二方面,本发明实施例提供了一种调平压合设备校准装置,所述装置适用于调平压合设备,所述调平压合设备包括上玻璃基板和下玻璃基板,所述上玻璃基板的下表面和所述下玻璃基板的上表面用于吸附晶圆,所述上玻璃基板的上表面四周均匀间隔开地设置有四个电机,且所述上玻璃基板上存在与每个电机的距离均相同的中心点,所述电机用于驱动上玻璃基板向所述下玻璃基板所在的位置移动以实现压合功能,所述装置包括:
30、电机禁用模块,在进入调平流程后,禁用所述上玻璃基板的上表面的一个电机;
31、目标距离确定模块,用于根据所述中心点与其他三个电机之间的距离以及预先测量到的第一夹角,确定所述其他三个电机需要驱动所述上玻璃基板移动的目标距离,所述第一夹角为所述上玻璃基板所吸附的第一晶圆的下表面与所述下玻璃基板所吸附的第二晶圆的上表面之间的夹角;
32、基板移动模块,用于根据所述目标距离控制所述其他三个电机驱动所述上玻璃基板移动。
33、第三方面,本发明实施例提供了一种调平压合设备,所述调平压合设备包括上玻璃基板和下玻璃基板,所述上玻璃基板的下表面和所述下玻璃基板的上表面用于吸附晶圆,所述上玻璃基板的上表面四周均匀间隔开地设置有四个电机,且所述上玻璃基板上存在与每个电机的距离均相同的中心点,所述电机用于驱动上玻璃基板向所述下玻璃基板所在的位置移动以实现压合功能,所述调平压合设备还包括处理器以及存储器;
34、所述存储器用于存储计算机程序,并将所述计算机程序传输给所述处理器;
35、所述处理器用于根据所述计算机程序中的指令执行如第一方面所述的一种调平压合设备校准方法。
36、第四方面,本发明实施例提供了一种存储计算机可执行指令的存储介质,所述计算机可执行指令在由计算机处理器执行时用于执行如第一方面所述的一种调平压合设备校准方法。
37、上述,本发明实施例提供了一种调平压合设备校准方法、装置、调平压合设备及存储介质,本发明实施例通过在上玻璃基板的上表面四周均匀间隔开地设置有四个电机,且上玻璃基板上存在与每个电机的距离均相同的中心点,在进入调平流程后,则禁用其中一个电机,并根据中心点与尚未禁用的三个电机之间的距离,以及上玻璃基板所吸附的第一晶圆的下表面与下玻璃基板所吸附的第二晶圆的上表面之间的夹角,确定出尚未禁用的三个电机需要驱动上玻璃基板移动的目标距离,并根据目标距离控制电机驱动上玻璃基板移动,以完成上玻璃基板和下玻璃基板的调平。本发明实施例可以自适应进行上玻璃基板和下玻璃基板的调平,且通过采用四点调平机构,在提高了调平精度的同时,也提高调平过程中的稳定性以及适应性,提高了晶圆的加工精度和良品率,解决了现有技术中晶圆的加工精度差和良品率低的技术问题。
- 还没有人留言评论。精彩留言会获得点赞!