用于互联网通信卫星的QV频段馈电天线组件的控制组件、系统及其控制方法
本发明涉及航天器领域,并且更具体地涉及用于互联网通信卫星的qv频段馈电天线组件的控制组件、系统及其控制方法。
背景技术:
1、目前,在航天领域中,qv频段馈电天线作为全球多媒体卫星的重要通信载荷,承担着实现天地信息交互的关键任务。伺服控制系统必须具备高精度指向、快速响应、高可靠性和长寿命的能力。根据卫星轨道和地面信关站的位置,伺服控制系统从载荷管理单元或星务计算机接收对地信关站指向所需的计算位置角度,然后控制天线电机及其组件实时精确地跟踪目标位置。要实现这些功能,对位置检测的准确性和可靠性提出了极高的要求。伺服控制系统根据不同的位置检测技术,采用相应的位置控制策略,以优化控制器的性能。
2、在航天领域,星上qv频段双偏馈馈电天线的位置检测通常采用霍尔传感器或光电开关,并结合步进电机实现转动机构的开环位置控制。虽然这种方法结构简单,但容易出现失步现象,导致天线指向精度出现较大偏差。此外,由于缺乏实时位置反馈,难以及时发现转轴卡死或硬限位等故障。这不仅增加了使用风险,还可能因撞击硬限位产生的振动,对星上其他敏感载荷的正常工作构成潜在威胁。
3、为了解决开环位置控制带来的问题,目前的改进措施是在减速器端增加双通道旋转变压器或高精度光栅编码器。虽然这种方案有效解决了开环控制的缺陷,但双通道旋转变压器解码器或光栅编码器用于航天应用时,存在产品价格高昂和解码电路复杂的缺点。对于日益竞争激烈的商业航天领域而言,这样的成本代价难以承受。
4、因此本领域中需要一种低成本、高可靠性的用于互联网通信卫星的qv频段馈电天线组件的控制组件、系统及其控制方法。
技术实现思路
1、为了提供一种低成本、高可靠性的用于互联网通信卫星的qv频段馈电天线组件的控制组件、系统及其控制方法,提供本发明。
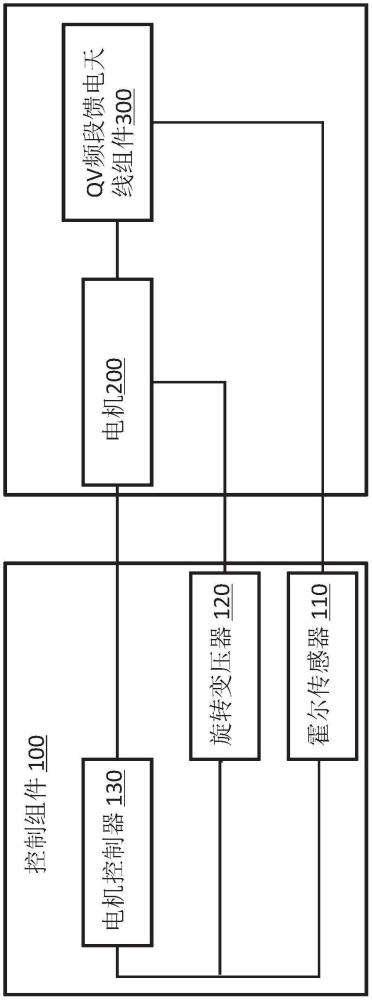
2、根据本发明的一个方面,提供一种用于互联网通信卫星的qv频段馈电天线组件的控制组件,所述卫星包括所述qv频段馈电天线组件和用于驱动所述qv频段馈电天线组件运动的电机,所述qv频段馈电天线组件包括qv天线、天线关节以及连接所述qv天线和所述天线关节的连接部,所述天线关节包括天线转轴,所述控制组件包括:霍尔传感器,设置在所述天线关节与所述连接部的连接处,用于检测所述天线转轴的绝对位置;旋转变压器,设置在所述电机的一端,用于检测所述电机的单圈绝对位置;电机控制器,与所述霍尔传感器和所述旋转变压器通信地耦合,以控制所述电机的运动,所述电机控制器配置成用于:对所述霍尔传感器和所述旋转变压器分别进行故障检测;基于所述故障检测的结果来确定所述天线转轴的绝对零位;以及基于所述故障检测的结果,选择性地执行所述qv频段馈电天线组件的位置控制模式。
3、根据如上所述的控制组件,其中,所述电机控制器配置成用于:响应于所述故障检测的结果指示所述旋转变压器功能正常,执行闭环位置控制模式。
4、根据如上任一项所述的控制组件,其中,所述电机控制器配置成用于:响应于所述故障检测的结果指示所述霍尔传感器功能正常,基于开环位置控制模式下所述霍尔传感器的信号和所述旋转变压器的信号来确定所述绝对零位;或者响应于所述故障检测的结果指示所述霍尔传感器功能异常,在所述开环位置控制模式下,通过与所述天线关节处的硬限位的碰撞的发生、基于所述旋转变压器的信号来确定所述绝对零位。
5、根据如上任一项所述的控制组件,其中,所述电机控制器还配置成用于:在断电前存储当前的所述绝对零位和所述旋转变压器当前检测到的所述电机的单圈绝对位置。
6、根据如上任一项所述的控制组件,其中,所述电机控制器还配置成用于:在下次任务上电后,判断所述旋转变压器检测到的所述电机的单圈绝对位置是否与所存储的所述电机的单圈绝对位置匹配;以及响应于所述判断的结果指示匹配,使用所存储的绝对零位来恢复所述天线转轴的当前位置。
7、根据如上任一项所述的控制组件,其中,所述电机控制器配置成用于:响应于所述故障检测的结果指示所述旋转变压器功能异常,执行开环细分位置控制模式。
8、根据如上任一项所述的控制组件,其中,所述电机控制器配置成用于:响应于所述故障检测的结果指示所述霍尔传感器功能正常,基于所述霍尔传感器的上升沿和下降沿处的脉冲宽度计数来确定所述绝对零位;或者响应于所述故障检测的结果指示所述霍尔传感器功能异常,基于硬限位碰撞控制策略确定所述绝对零位。
9、根据如上任一项所述的控制组件,其中,所述电机控制器包括:旋变信号解码电路和霍尔信号调理电路,分别与所述旋转变压器和所述霍尔传感器通信地耦合。
10、根据如上任一项所述的控制组件,其中,所述旋变信号解码电路配置成用于执行硬件解码和软件解码,其中,所述硬件解码和所述软件解码互为备份。
11、根据本发明的另一方面,提供一种qv频段馈电天线系统,包括:qv频段馈电天线组件;电机,用于驱动所述qv频段馈电天线组件运动;谐波减速器,耦合在所述qv频段馈电天线组件与所述电机之间;以及根据如上任一项所述的控制组件,所述控制组件与所述电机耦合。
12、根据如上所述的系统,其中,所述系统还包括:连接器,分别与所述谐波减速器的输出轴和所述qv频段馈电天线组件的天线转轴连接。
13、根据本发明的另一方面,提供一种用于控制互联网通信卫星的qv频段馈电天线组件的方法,所述卫星包括所述qv频段馈电天线组件、用于驱动所述qv频段馈电天线组件运动的电机、霍尔传感器和旋转变压器,所述qv频段馈电天线组件包括qv天线、天线关节、以及连接所述qv天线和所述天线关节的连接部,所述霍尔传感器设置在所述天线关节与所述连接部的连接处,用于检测所述天线转轴的绝对位置,所述旋转变压器设置在所述电机的一端,用于检测所述电机的单圈绝对位置,所述方法包括:对所述霍尔传感器和所述旋转变压器分别进行故障检测;基于所述故障检测的结果来确定所述天线转轴的绝对零位;以及基于所述故障检测的结果,选择性地执行所述qv频段馈电天线组件的位置控制模式。
14、根据如上所述的方法,其中,基于所述故障检测的结果,选择性地执行所述qv频段馈电天线组件的位置控制模式包括:响应于所述故障检测的结果指示所述旋转变压器功能正常,执行闭环位置控制模式。
15、根据如上任一项所述的方法,其中,基于所述故障检测的结果来确定所述天线转轴的绝对零位包括:响应于所述故障检测的结果指示所述霍尔传感器功能正常,基于开环位置控制模式下所述霍尔传感器的信号和所述旋转变压器的信号来确定所述绝对零位;或者响应于所述故障检测的结果指示所述霍尔传感器功能异常,在所述开环位置控制模式下,通过与所述天线关节处的硬限位的碰撞的发生、基于所述旋转变压器的信号来确定所述绝对零位。
16、根据如上任一项所述的方法,所述方法还包括:在断电前存储当前的所述绝对零位和所述旋转变压器当前检测到的所述电机的单圈绝对位置。
17、根据如上任一项所述的方法,所述方法还包括:在下次任务上电后,判断所述旋转变压器检测到的所述电机的单圈绝对位置是否与所存储的所述电机的单圈绝对位置匹配;以及响应于所述判断的结果指示匹配,使用所存储的绝对零位来恢复所述天线转轴的当前位置。
18、根据如上任一项所述的方法,其中,基于所述故障检测的结果,选择性地执行所述qv频段馈电天线组件的位置控制模式包括:响应于所述故障检测的结果指示所述旋转变压器功能异常,执行开环细分位置控制模式。
19、根据如上任一项所述的方法,其中,基于所述故障检测的结果来确定所述天线转轴的绝对零位包括:响应于所述故障检测的结果指示所述霍尔传感器功能正常,基于在所述霍尔传感器的上升沿和下降沿处累积的脉冲宽度计数来确定所述绝对零位;或者响应于所述故障检测的结果指示所述霍尔传感器功能异常,基于硬限位碰撞控制策略确定所述绝对零位。
20、根据本发明的实施例的用于互联网通信卫星的qv频段馈电天线组件的控制组件、系统及其控制方法消除了传统步进电机及其组件失步风险,提高了天线连续指向跟踪精度,同时降低了生产成本和硬件电路成本,缩短了任务开发周期。
- 还没有人留言评论。精彩留言会获得点赞!