晶圆检测设备的传感器探测位置确定方法、装置及晶圆检测设备与流程
本发明涉及半导体制造,尤其涉及一种晶圆检测设备的传感器探测位置确定方法、装置及晶圆检测设备。
背景技术:
1、随着半导体先进制程的发展,工艺环节不断增加,对工艺控制水平提出了更高的要求。28nm工艺节点的工艺步骤有数百道工序,由于采用多层套刻技术,14nm及以下节点工艺步骤增加至近千道工序。只有保证每一道工序的良品率都超过99.99%,最终良品率方可超过95%。因此,晶圆套刻测量环节贯穿制造全工程,是保证芯片生产良品率的关键环节。
2、套刻误差的定义是两层图形结构中心之间的平面距离。随着集成电路的层数不断增多,多重图形和多重曝光的光刻工艺被广泛应用,不同步骤形成的电路图形之间的套刻精度愈发重要。套刻误差过大形成的错位,会导致整个电路失效报废。套刻误差测量设备,用于确保不同层级电路图形,和同一层电路图形的正确对齐和放置。套刻误差测量通常在每道光刻步骤后进行。
3、图1是晶圆的部分示意图,参考图1,目前实现套刻误差测量的机台,需要传感器与运动台配合获得设置于运动台上的被测物的图像,因此需要确认传感器相对于运动台的位置,即获得传感器的探测位置,而获得传感器的探测位置的方法主要是通过传感器与被测物上的标记100进行对准。但对于高倍物镜,它的视野很小,此时,若传感器在未校准位置,与被测物上的标记100对准的难度很大,需要经验丰富的人员反复微调来寻找标记100,进而反复微调来对准标记100,对人员要求高,且调试难度大、效率低。因此如何实现传感器探测位置的精确检测是一个急需解决的问题。
技术实现思路
1、本发明提供了一种晶圆检测设备的传感器探测位置确定方法、装置及晶圆检测设备,利用晶圆中的目标图形,通过步进拍照的方式即可计算出传感器的位置坐标,不仅成本低、操作简单,而且可以提高标定效率。
2、根据本发明的第一方面,提供了一种晶圆检测设备的传感器探测位置确定方法,检测设备包括工作台、晶圆和传感器,所述传感器包括物镜和相机,所述晶圆上设置有目标图形,所述相机通过接收所述物镜的透射光线对所述目标图形进行拍摄,所述传感器探测位置的确定方法包括:
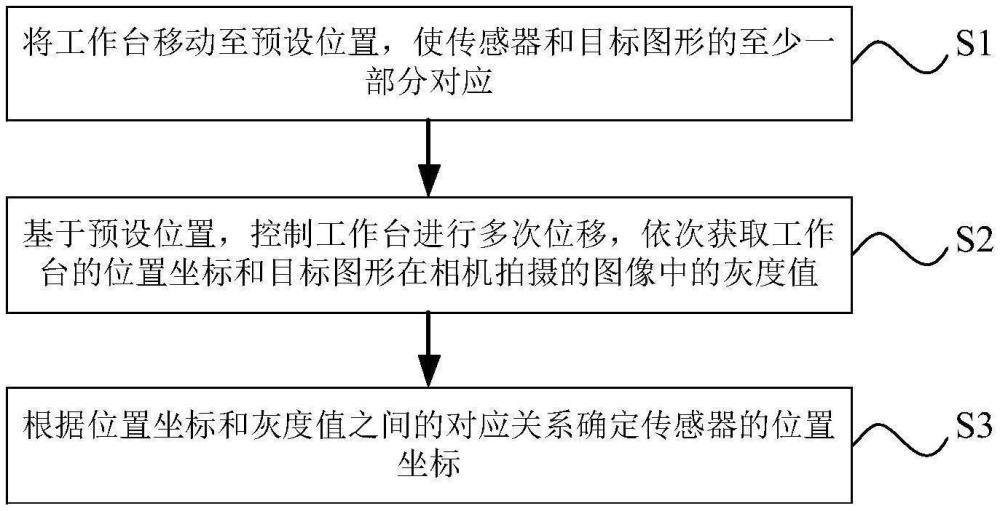
3、将所述工作台移动至预设位置,使所述传感器和所述目标图形的至少一部分对应;
4、基于所述预设位置,控制所述工作台进行多次位移,依次获取所述工作台的位置坐标和所述目标图形在所述相机拍摄的图像中的灰度值;
5、根据所述位置坐标和所述灰度值之间的对应关系确定所述传感器的位置坐标。
6、可选的,在将所述工作台移动至预设位置,使所述传感器和所述目标图形的至少一部分对应之前,包括:
7、确定所述晶圆中的目标图形;
8、根据所述目标图形确定所述工作台的预设位置;其中,所述目标图形的尺寸大于所述传感器的安装误差。
9、可选的,基于所述预设位置,控制所述工作台进行多次位移,依次记录所述工作台的位置坐标和所述目标图形在所述相机拍摄的图像中的灰度值,包括:
10、以起始位置为起点,以第一预设步长控制所述工作台沿第一方向进行x次位移,同时记录所述工作台的x个位置坐标和所述晶圆中目标图形在所述相机拍摄的图像中的x个灰度值,分别记录x个所述灰度值为g11~g1x;
11、以所述起始位置为起点,以第二预设步长控制所述工作台沿第二方向进行y次位移,同时记录所述工作台的y个位置坐标和所述晶圆中目标图形在所述相机拍摄的图像中的y个灰度值,分别记录y个所述灰度值为g21~g2y;
12、其中,所述第一方向与所述第二方向互相垂直;x和y均为大于1的正整数。
13、可选的,所述根据所述位置坐标和所述灰度值之间的对应关系确定所述传感器的位置坐标,包括:
14、基于x个所述位置坐标和x个所述灰度值,建立所述晶圆检测设备的第一工作曲线图;
15、基于所述第一工作曲线图确定所述传感器的第一位置坐标;
16、基于y个所述位置坐标和y个所述灰度值,建立所述晶圆检测设备的第二工作曲线图;
17、基于所述第二工作曲线图确定所述传感器的第二位置坐标。
18、可选的,所述基于所述第一工作曲线图确定所述传感器的第一位置坐标,基于所述第二工作曲线图确定所述传感器的第二位置坐标,包括:
19、基于x个所述灰度值计算所述图像在所述第一方向上的第一灰度中值;
20、根据所述第一灰度中值确定所述传感器的第一位置坐标;
21、基于y个所述灰度值计算所述图像在所述第二方向上的第二灰度中值;根据所述第二灰度中值确定所述传感器的第二位置坐标。
22、可选的,所述第一灰度中值通过公式(一)计算:
23、
24、其中,gax为所述第一灰度中值,gmax1为所述图像中沿所述第一方向上的最大灰度值,gmin1为所述图像中沿所述第一方向上的最小灰度值,其中,gmax1和gmin1分别为g11~g1x中的最大值和最小值;
25、根据x个所述灰度值与所述第一灰度中值确定所述传感器的第一位置坐标dx,
26、dx为│gm-gax│min时gm对应所述第一方向上的坐标,其中,│gm-gax│min为x个所述灰度值分别与所述第一灰度中值进行做差取绝对值的最小值,gm为g11~g1x中的值;
27、所述第二灰度中值通过公式(二)计算:
28、
29、其中,gay为所述第二灰度中值,gmax2为所述图像中沿所述第二方向上的最大灰度值,gmin2为所述图像中沿所述第二方向上的最小灰度值,其中,gmax2和gmin2分别为g21~g2y中的最大值和最小值;
30、根据y个所述灰度值与所述第二灰度中值确定所述传感器的第二位置坐标dy,
31、dy为│gn-gay│min时gn对应所述第二方向上的坐标,其中,│gn-gay│min为y个所述灰度值分别与所述第二灰度中值进行做差取绝对值的最小值gn为g21~g2y中的值。
32、可选的,在根据所述第一灰度中值确定所述传感器的第一位置坐标和根据根据所述第二灰度中值确定所述传感器的第二位置坐标之后,包括:
33、获取所述传感器的第一位置坐标dx和所述传感器的第二位置坐标dy;
34、根据所述传感器的第一位置坐标dx和所述传感器的第二位置坐标dy确定所述传感器的位置坐标为(dx,dy)。
35、可选的,所述目标图形的形状包括矩形、直角三角形、“l”形和“回”字形中任意一种。
36、根据本发明的第二方面,提供了一种晶圆检测设备的传感器探测位置确定装置,所述位置确定装置用于执行本发明第一方面中任一项所述的晶圆检测设备的传感器探测位置确定方法,所述位置确定装置包括:
37、获取模块,用于将所述工作台移动至预设位置,使所述传感器和所述目标图形的至少一部分对应;
38、记录模块,用于基于所述预设位置,控制所述工作台进行多次位移,依次获取所述工作台的位置坐标和所述目标图形在所述相机拍摄的图像中的灰度值;
39、计算模块,用于根据所述位置坐标和所述灰度值之间的对应关系确定所述传感器的位置坐标。
40、根据本发明的第三方面,提供了一种晶圆检测设备,包括本发明第二方面中所述的晶圆检测设备的传感器探测位置确定装置。
41、本发明公开了一种晶圆检测设备的传感器探测位置确定方法、装置及晶圆检测设备,检测设备包括工作台、晶圆和传感器,传感器包括物镜和相机,晶圆上设置有目标图形,相机通过接收物镜的透射光线对目标图形进行拍摄,传感器探测位置的确定方法包括:将工作台移动至预设位置,使传感器和目标图形的至少一部分对应;基于预设位置,控制工作台进行多次位移,依次获取工作台的位置坐标和目标图形在相机拍摄的图像中的灰度值;根据位置坐标和灰度值之间的对应关系确定传感器的位置坐标。本发明提供的一种晶圆检测设备的传感器探测位置确定方法,利用晶圆中的目标图形,通过步进拍照的方式即可计算出传感器探测的位置坐标,不仅成本低、操作简单,而且可以提高标定效率。
42、应当理解,本部分所描述的内容并非旨在标识本发明的实施例的关键或重要特征,也不用于限制本发明的范围。本发明的其它特征将通过以下的说明书而变得容易理解。
- 还没有人留言评论。精彩留言会获得点赞!