本技术涉及光伏,尤其涉及一种激光定位合片机、方法、装置、控制器及介质。
背景技术:
1、在建筑集成光伏(bipv)领域,背板玻璃合片工艺是关键环节之一,直接影响到bipv产品的质量和可靠性。传统的背板玻璃合片定位方法通常依赖于人工目视或简易机械辅助定位,这些方法存在诸多不足。例如,人工目视定位不仅效率低下,而且容易受操作者经验和环境光线的影响,导致定位精度不高。简易机械辅助定位虽然在一定程度上提高了定位速度,但由于其结构简单,难以实现精确的微调,常常出现定位不准确的问题。
2、定位不准确不仅会降低合片效率,还会在后续使用过程中引发电气连接不良、组件性能不稳定等严重问题,严重影响bipv产品的质量和可靠性。随着bipv技术的不断发展和应用场景的日益广泛,市场对于合片定位的精度和速度提出了更高的要求。现有的定位方法已无法满足这一需求,因此,开发一种高效、精准的定位装置成为亟待解决的技术难题。
技术实现思路
1、本技术提供了一种激光定位合片机、方法、装置、控制器及介质,旨在解决传统的背板玻璃合片定位方法通常依赖于人工目视或简易机械辅助定位,这些方法存在诸多不足。例如,人工目视定位不仅效率低下,而且容易受操作者经验和环境光线的影响,导致定位精度不高。简易机械辅助定位虽然在一定程度上提高了定位速度,但由于其结构简单,难以实现精确的微调,常常出现定位不准确的问题。定位不准确不仅会降低合片效率,还会在后续使用过程中引发电气连接不良、组件性能不稳定等严重问题,严重影响bipv产品的质量和可靠性。随着bipv技术的不断发展和应用场景的日益广泛,市场对于合片定位的精度和速度提出了更高的要求。现有的定位方法已无法满足这一需求,因此,开发一种高效、精准的定位装置成为亟待解决的技术难题。
2、第一方面,本技术提供了一种激光定位合片机,包括:
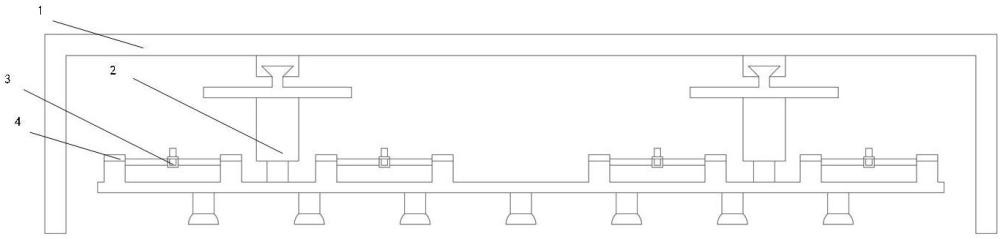
3、多个吸附模块,多个所述吸附模块用于协同将背板玻璃放置在待合片组件上,完成所述背板玻璃与所述待合片组件的合片;
4、多个支撑模块,至少一个所述支撑模块设置于一个所述吸附模块上;
5、激光定位模块,所述激光定位模块可活动设置于所述支撑模块中,用于发射激光定位光线;
6、调节模块,所述调节模块设置于所述支撑模块上并与所述激光定位模块连接,用于调整所述激光定位模块的位置和角度;
7、控制器,所述控制器与所述吸附模块、激光定位模块和调节模块电连接,所述控制器用于在控制所述吸附模块吸附所述背板玻璃时,控制所述激光定位模块发射激光定位光线,并通过控制所述吸附模块移动所述待合片组件和通过所述调节模块移动所述激光定位模块,直至通过所述激光定位光线确定所述待合片组件的汇流条伸出端与背板玻璃的钻孔处重合时,控制所述吸附模块将所述背板玻璃放置在所述待合片组件上,完成所述背板玻璃与所述待合片组件的合片。
8、在一些实施例中,还包括:罩体,所述罩体设置于所述吸附模块、支撑模块、激光定位模块、调节模块和控制器的外侧,以使得所述激光定位合片机在暗室环境下完成所述背板玻璃与所述待合片组件的合片。
9、在一些实施例中,还包括:视觉采集模块,所述视觉采集模块朝向所述背板玻璃和所述待合片组件,用于采集合片图像信息,所述合片图像信息至少包括所述背板玻璃、待合片组件和所述激光定位光线;其中,所述控制器与所述视觉采集模块电连接,用于根据所述合片图像信息确定所述待合片组件的汇流条伸出端与背板玻璃的钻孔处重合。
10、在一些实施例中,所述激光定位合片机还包括支撑架和微调节模块,所述待合片组件经所述微调节模块放置于所述支撑架上;所述控制所述吸附模块将所述背板玻璃放置在所述待合片组件上。
11、第二方面,本技术提供了一种激光定位方法,应用于如本技术任一实施例所提供的激光定位合片机的控制器;所述方法包括:
12、在控制吸附模块吸附背板玻璃时,控制激光定位模块发射激光定位光线;
13、获取视觉采集模块采集的第一图像信息;
14、解析所述第一图像信息,确认所述激光定位光线与待合片组件的汇流条伸出端的第一偏差信息;
15、根据所述第一偏差信息控制所述调节模块移动所述激光定位模块,以使得所述激光定位光线与所述汇流条伸出端对齐并获取所述视觉采集模块采集的第二图像信息;
16、解析所述第二图像信息,确认所述激光定位光线与所述背板玻璃的钻孔处的第二偏差信息;
17、根据所述第二偏差信息控制所述吸附模块移动所述背板玻璃,以使得所述背板玻璃的钻孔处、所述激光定位光线和所述汇流条伸出端重合;
18、控制所述吸附模块将所述背板玻璃放置在所述待合片组件上,完成所述背板玻璃与所述待合片组件的合片。
19、在一些实施例中,所述解析所述第一图像信息,确认所述激光定位光线与待合片组件的汇流条伸出端的第一偏差信息,包括:对所述第一图像信息进行目标检测,获取所述汇流条伸出端对应的伸出端中心点信息和所述激光定位光线对应的斑点中心点信息;计算所述伸出端中心点信息和所述斑点中心点信息对应的第一偏差信息;所述第一偏差信息包括水平偏差、垂直偏差和角度偏差。
20、示例性的,所述对所述第一图像信息进行目标检测,获取所述汇流条伸出端对应的伸出端中心点信息和所述激光定位光线对应的斑点中心点信息,包括:根据预设的边缘检测算法在所述第一图像信息中提取所述汇流条伸出端的边缘信息;根据汇流条伸出端对应的预设轮廓所述对所述第一图像信息进行轮廓识别,获取所述汇流条伸出端对应的轮廓信息;根据所述边缘信息和所述轮廓信息计算所述伸出端中心点信息;在所述第一图像中提取亮度大于预设亮度的高亮度区域,所述高亮度区域为所述激光定位光线对应的斑点区域;根据所述斑点区域计算所述斑点中心点信息。
21、在一些实施例中,所述根据所述第一偏差信息控制所述调节模块移动所述激光定位模块,包括:解析所述第一图像信息,获取所述激光定位光线对应的调节模块中心点位置信息;根据所述调节模块中心点位置信息和所述第一偏差信息生成控制信息,以根据所述控制信息控制所述调节模块移动所述激光定位模块至所述激光定位光线与所述汇流条伸出端对齐。
22、在一些实施例中,所述根据所述第二偏差信息控制所述吸附模块移动所述背板玻璃,包括:解析所述第二偏差信息,获取所述背板玻璃的钻孔处对应的钻孔中心坐标和所述激光定位光线对应的光斑中心坐标;根据所述钻孔中心坐标和光斑中心坐标生成第二控制信息;根据所述第二控制信息控制所述吸附模块移动所述背板玻璃,以使得所述背板玻璃的钻孔处、所述激光定位光线和所述汇流条伸出端重合。
23、示例性的,所述根据所述钻孔中心坐标和光斑中心坐标生成第二控制信息,包括:解析所述第二图像信息,获取所述汇流条伸出端对应的汇流条位置信息;根据所述汇流条位置信息获取汇流条中心坐标;根据所述汇流条中心坐标、钻孔中心坐标和光斑中心坐标生成所述第二控制信息;所述第二控制信息包括水平控制信息、垂直控制信息和角度控制信息;所述水平控制信息、垂直控制信息和角度控制信息的表达式包括
24、;
25、;
26、;
27、其中,为所述水平控制信息,为所述垂直控制信息,为所述角度控制信息,(,)为所述钻孔中心坐标,(,)为所述汇流条中心坐标,(,)为所述光斑中心坐标。
28、在一些实施例中,所述激光定位合片机还包括支撑架和微调节模块,所述待合片组件经所述微调节模块放置于所述支撑架上;所述控制所述吸附模块将所述背板玻璃放置在所述待合片组件上,包括:获取所述视觉采集模块采集的第三图像信息;解析所述第三图像信息,获取所述背板玻璃和所述待合片组件对应的叠差信息;根据所述叠差信息生成微调节信息,以根据所述微调节信息控制所述微调节模块对所述待合片组件的位置进行微调;在微调完成后控制所述吸附模块将所述背板玻璃放置在所述待合片组件上,以消除合片后所述待合片组件和所述背板玻璃的叠差。
29、第三方面,本技术提供了一种激光定位装置,应用于如本技术任一实施例所提供的激光定位合片机的控制器;所述装置包括:
30、光线发射模块,用于在控制吸附模块吸附背板玻璃时,控制激光定位模块发射激光定位光线;
31、第一获取模块,用于获取视觉采集模块采集的第一图像信息;
32、信息解析模块,用于解析所述第一图像信息,确认所述激光定位光线与所述汇流条伸出端的第一偏差信息;
33、第二获取模块,用于根据所述第一偏差信息控制所述调节模块移动所述激光定位模块,以使得所述激光定位光线与待合片组件的汇流条伸出端对齐并获取所述视觉采集模块采集的第二图像信息;
34、偏差解析模块,用于解析所述第二图像信息,确认所述激光定位光线与所述背板玻璃的钻孔处的第二偏差信息;
35、控制移动模块,用于根据所述第二偏差信息控制所述吸附模块移动所述背板玻璃,以使得所述背板玻璃的钻孔处、所述激光定位光线和所述汇流条伸出端重合;
36、合片完成模块,用于控制所述吸附模块将所述背板玻璃放置在所述待合片组件上,完成所述背板玻璃与所述待合片组件的合片。
37、第四方面,本技术提供一种控制器,所述控制器包括存储器和处理器,所述存储器用于存储计算机程序,所述处理器,用于执行所述计算机程序并在执行所述计算机程序时实现如本技术任一实施例所提供的激光定位方法的步骤。
38、第五方面,本技术提供了一种计算机可读存储介质,计算机可读存储介质存储有计算机程序,计算机程序被处理器执行时使处理器实现如应用于如本技术任一实施例所提供的激光定位方法的步骤。
39、本技术实施例提供的一种激光定位合片机、方法、装置、控制器及介质,本技术提出了一种激光定位合片机,旨在提高背板玻璃合片定位的精度和效率,具体技术内容如下:
40、多个吸附模块:用于协同将背板玻璃放置在待合片组件上,确保背板玻璃能够准确对齐。
41、多个支撑模块:至少一个支撑模块设置在一个吸附模块上,用于支撑和固定激光定位模块和调节模块。
42、激光定位模块:可活动设置在支撑模块中,用于发射激光定位光线,帮助精确对齐背板玻璃和待合片组件。
43、调节模块:设置在支撑模块上并与激光定位模块连接,用于调整激光定位模块的位置和角度,确保激光定位光线能够准确照射到目标位置。
44、控制器:与吸附模块、激光定位模块和调节模块电连接,用于整体控制合片过程。控制吸附模块吸附背板玻璃,并控制激光定位模块发射激光定位光线。通过控制吸附模块移动待合片组件和调节模块移动激光定位模块,使激光定位光线确定待合片组件的汇流条伸出端与背板玻璃的钻孔处重合。最终控制吸附模块将背板玻璃放置在待合片组件上,完成合片操作。
45、进而所提供的激光定位合片机至少具有以下有益效果:
46、1.提高定位精度:通过激光定位模块的精确照射,可以显著提高背板玻璃与待合片组件的对齐精度,减少人为误差和环境光线的影响。
47、2.提升合片效率:多个吸附模块协同工作,可以快速将背板玻璃放置在待合片组件上,提高合片速度。自动化控制系统减少了人工操作的时间,进一步提升了生产效率。
48、3.增强可靠性和稳定性:激光定位技术和自动化调节模块的结合,确保了合片过程的稳定性和可靠性,减少了电气连接不良和组件性能不稳定的问题。
49、4.适应性更强:激光定位模块和调节模块的可活动设置,使得该合片机能够适应不同尺寸和形状的背板玻璃和待合片组件,具有更强的通用性和灵活性。
50、5.满足市场高要求:随着bipv技术的发展和应用场景的增多,市场对于合片定位的精度和速度提出了更高的要求。该激光定位合片机能够有效满足这些需求,提高产品质量和市场竞争力。
51、综上所述,该激光定位合片机通过集成多个吸附模块、支撑模块、激光定位模块和调节模块,并结合智能控制器,实现了高效、精准的背板玻璃合片定位,显著提升了bipv产品的质量和生产效率。
52、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本技术。