三电平功率变换器及控制方法与流程
1.本公开涉及一种在多电平功率变换器中实现电容电压平衡的控制方法,尤其实施例涉及一种在三电平功率变换器中实现电容器电压平衡的控制方法。
背景技术:
2.随着技术进一步发展,各种电子设备,例如手机、平板电脑、数码相机、mp3播放器等已经流行起来。每个电子设备都需要基本恒定电压下的直流(direct current,dc)电源,即便电子设备产生的电流可以在较宽的范围内变化,也能在特定范围内对其调节。当输入电压低于特定范围时,可以采用升压dc/dc变换器将输入电压变换为特定范围内的调节电压。另一方面,当输入电压高于特定范围时,可以使用降压dc/dc变换器将输入电源的电压变换为较低的电压,以满足电子电路所指定的工作电压。
3.dc/dc变换拓扑可能多种多样。根据拓扑的差异,dc/dc变换器可以分为三类,即开关dc-dc变换器,线性调节器和开关电容转换器。根据电压电平的差异,dc/dc变换器可以分为两类,即两电平功率变换器和三电平功率变换器。开关电容变换器是三电平功率变换器的其中一类。
4.随着集成电路越来越先进,但同时尺寸却越来越小,紧凑且高效的dc/dc变换拓扑是所期望的。同其他拓扑相比,开关电容变换器等三电平变换器没有那么复杂,因为开关电容变换器由多个开关和一个飞电容组成。此外,开关电容变换器占地面积小,能够通过在充放电阶段切换飞电容来产生高效的功率转换。因此,开关电容变换器可以为集成电路提供紧凑高效的电源。
5.在具有飞电容的三电平变换器中,必须得保持飞电容的电压平衡以使三电平功率变换器按照预期高效安全地工作。飞电容上的电压不平衡可能是由许多因素引起的,例如,工作条件变换(例如,启动,输入或输出电压变化,负载变化或瞬变等),电路不对称,组件变化,公差,不匹配的脉宽调制(pulse width modulation,pwm)信号或栅极驱动、其任意组合等。
6.不平衡的电容器不仅会导致不对称的电路工作,这可能会降低三电平功率变换器的功率效率,还会对电源开关和电容器造成额外的过电压应力,从而导致组件和系统故障。在一些输入电压变化范围很大的应用中,需要实现电容器电压平衡以减少电源开关和电容器上的电压应力。
技术实现要素:
7.这些和其他问题通过本公开的优选实施例得到解决或规避,并且通常实现了技术优势,本公开的优选实施例提供了一种在三电平功率变换器中实现电容电压平衡的控制机制。
8.根据一个实施例,一种方法,包括检测三电平功率变换器的电压信号,所述电压信号指示所述三电平功率变换器中的电容器电压平衡;以及,动态调整操作变量以调整所述
电压信号,直到所述三电平功率变换器中的所述电容器电压平衡满足标准。
9.所述三电平功率变换器包括在输入电压总线和地之间串联连接的第一开关,第二开关,第三开关和第四开关;连接在所述第一开关和所述第二开关的公共节点与所述第三开关和所述第四开关的公共节点之间的飞电容;以及,连接在所述第二开关和所述第三开关的公共节点与地之间的输出滤波器。
10.所述电压信号是跨所述飞电容的电压,以及,所述操作变量是所述第二开关的占空比。
11.所述方法还包括通过主控制回路确定占空比;通过本地控制回路确定占空比变化;以及,所述第一开关用于以所述占空比操作,以及,所述第二开关用于以所述占空比和所述占空比变化之和操作。
12.所述操作变量是所述第一开关的栅极驱动信号和所述第二开关的栅极驱动信号之间的可调延迟,以及,其中,所述可调延迟通过负反馈回路获得。
13.所述三电平功率变换器包括在输入电压总线和地之间串联连接的第一开关,第二开关,第三开关和第四开关;在所述输入电压总线和地之间串联连接的第一输入电容器和第二输入电容,连接到所述第二开关和所述第三开关的公共节点的所述第一输入电容器和所述第二输入电容器的公共节点;以及,连接在所述第一开关和所述第二开关的公共节点与所述第三开关和所述第四开关的公共节点之间的输出滤波器。
14.所述输出滤波器包括在所述第一开关和所述第二开关的所述公共节点与所述第三开关和所述第四开关的所述公共节点之间串联连接的电感器和电容器。
15.所述电压信号是在所述第二开关和所述第三开关的所述公共节点的电压,以及,所述操作变量是所述第四开关的占空比。
16.所述方法还包括通过主控制回路确定占空比;通过本地控制回路确定占空比变化;以及,所述第一开关用于以所述占空比操作,以及,所述第四开关用于以所述占空比和所述占空比变化之和操作。
17.所述操作变量是置于所述第一开关的栅极驱动信号和所述第四开关的栅极驱动信号之间的可调延迟,以及,其中,所述可调延迟通过负反馈回路获得。
18.根据另一个实施例,一种装置包括多电平功率变换器,包括,在输入电压总线和地之间串联连接的多个开关;以及,控制器,所述控制器用于为所述多个开关生成栅极驱动信号,其中,动态调整所述栅极驱动信号以在所述多电平功率变换器中获得电容器电压平衡。
19.所述多电平功率变换器包括在所述输入电压总线和地之间串联连接的第一开关,第二开关,第三开关和第四开关;连接在所述第一开关和所述第二开关的公共节点与所述第三开关和所述第四开关的公共节点之间的飞电容,动态调整所述栅极驱动信号以保持跨所述飞电容的电压等于所述输入电压总线上的电压的一半,以及,连接在所述第二开关和所述第三开关的公共节点与地之间的滤波器。
20.所述多电平变换器包括在所述输入电压总线和地之间串联连接的第一开关,第二开关,第三开关和第四开关;在所述输入电压总线和地之间串联连接的第一输入电容器和第二输入电容,连接到所述第二开关和所述第三开关的公共节点的所述第一输入电容器和所述第二输入电容器的公共节点,动态调整所述栅极驱动信号以保持在所述第一输入电容器和所述第二输入电容器的所述公共节点的电压等于所述输入电压总线上的电压的一半;
以及,连接在所述第一开关和所述第二开关的公共节点与所述第三开关和所述第四开关的公共节点之间的滤波器。
21.根据又一个实施例,一种方法包括通过主控制回路确定三电平功率变换器的第一占空比;以及,基于所述第一占空比,通过本地控制回路,确定所述三电平功率变换器的第二占空比,所述本地控制回路用于,通过调节所述第二占空比,使得所述三电平功率变换器获得电容器电压平衡。
22.所述三电平功率变换器包括在输入电压总线和地之间串联连接的第一开关,第二开关,第三开关和第四开关;连接在所述第一开关和所述第二开关的公共节点与所述第三开关和所述第四开关的公共节点之间的飞电容;以及,连接在所述第二开关和所述第三开关的公共节点与地之间的滤波器。
23.所述方法还包括将所述第一占空比应用于所述第一开关,以及,将所述第二占空比应用于所述第二开关,使用所述本地控制回路,通过调整所述第二占空比,动态调整跨所述飞电容的电压。
24.所述方法还包括通过应用置于所述第一开关的栅极驱动信号和所述第二开关的栅极驱动信号之间的可调延迟,动态调整跨所述飞电容的电压,其中,通过负反馈回路获得所述可调延迟。
25.所述三电平功率变换器包括在输入电压总线和地之间串联连接的第一开关,第二开关,第三开关和第四开关;在所述输入电压总线和地之间串联连接的第一输入电容器和第二输入电容,连接到所述第二开关和所述第三开关的公共节点的所述第一输入电容器和所述第二输入电容器的公共节点;以及,连接在所述第一开关和所述第二开关的公共节点与所述第三开关和所述第四开关的公共节点之间的滤波器。
26.所述方法还包括将所述第一占空比应用于所述第一开关,以及,将所述第二占空比应用于所述第四开关,使用所述本地控制回路,通过调整所述第二占空比,动态调整所述第一输入电容器和所述第二输入电容器的公共节点上的电压。
27.所述方法还包括通过应用置于所述第一开关的栅极驱动信号和所述第四开关的栅极驱动信号之间的可调延迟,动态调整所述第一输入电容器和所述第二电容器的公共节点上的电压,其中,通过负反馈回路获得所述可调延迟。
28.本公开实施例的一个优点是在三电平功率变换器中实现电容器电压平衡,从而提高三电平功率变换器的效率,可靠性和成本。
29.为能够更好地理解下面对本公开的详细描述,前文已经相当广泛地概述了本公开的特征和技术优点。以下将描述本公开的附加特征和优点,其形成了本公开权利要求的主题。本领域技术人员应该理解,所公开的概念和具体实施例可以容易地作为修改或设计用来执行本公开相同目的的其他结构或过程的基础。本领域技术人员还应该认识到,这些等价的结构并不背离所附权利要求中提出的本公开的精神和范围。
附图说明
30.为了更完整地理解本公开及其优势,现参考结合附图进行的如下描述,其中:
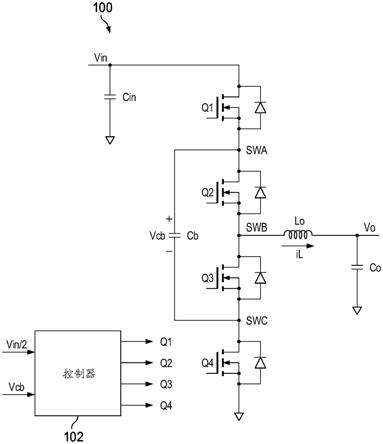
31.图1示出了根据本公开各种实施例的第一三电平功率变换器的示意图;
32.图2示出了根据本公开各种实施例的第一三电平功率变换器的低占空比模式的
pwm控制时序图;
33.图3示出了根据本公开各种实施例的第一三电平功率变换器的高占空比模式的pwm控制时序图;
34.图4示出了根据本公开各种实施例的一种控制图1所示的第一三电平功率变换器的方法的流程图;
35.图5示出了根据本公开各种实施例的第二三电平功率变换器的示意图;
36.图6示出了根据本公开各种实施例的应用于第二三电平功率变换器的第一pwm控制时序图;
37.图7示出了根据本公开各种实施例的应用于第二三电平功率变换器的第二pwm控制时序图;
38.图8示出了根据本公开各种实施例的一种控制图5所示的第二三电平功率变换器的方法的流程图;
39.图9示出了根据本公开各种实施例的一种控制电容器电压的反馈控制回路;以及
40.图10示出了根据本公开各种实施例的基于图9所示的反馈控制回路的控制时序图。
41.除非另有指示,否则不同图中的对应数字和符号通常指代对应的部分。绘制附图用于清晰地说明各种实施例的相关方面,并且附图没必要按比例绘制。
具体实施方式
42.以下详细讨论了目前优选的实施例的制作和使用。然而,应当理解,本公开提供了可以体现在多种特定的上下文中的许多可应用的发明构思。以下讨论的具体实施例仅仅示出了制作和使用本公开的具体方法,并不限制本公开的范围。
43.将根据特定上下文中的优选实施例描述本公开,即一种在三电平功率变换器中实现电容器电压平衡的控制方法。但是,本公开也应用于各种多电平功率变换器。在下文中,将参照附图详细说明各种实施例。
44.图1示出了根据本公开各种实施例的第一三电平功率变换器的示意图。第一三电平功率变换器100包括输入电容器cin,第一开关q1、第二开关q2、第三开关q3、第四开关q4、电容cb、输出电感器lo和输出电容器co。如图1所示,输出电感器lo和输出电容器co形成一个输出滤波器。输出电感器lo和输出电容器co的公共节点为第一三电平功率变换器100的输出端(vo)。
45.第一开关q1、第二开关q2、第三开关q3和第四开关q4串联在输入电压源vin和地之间。在整个描述过程中,输入电压源vin的正极端也称为输入电压总线。第一开关q1和第二开关q2的公共节点表示为swa,如图2所示。同样地,第二开关q2和第三开关q3的公共节点表示为swb。第三开关q3和第四开关q4的公共节点表示为swc。如图1所示,电容器cb连接在swa和swc之间。
46.在一些实施例中,电容器cb用作飞电容。在整个描述过程中,电容器cb也被称为飞电容cb。
47.根据一个实施例,开关(例如,开关q1-q4)可以是金属氧化物半导体场效应晶体管(metal oxide semiconductor field-effect transistor,mosfet)器件。可替代地,开关
元件可以是任何可控制的开关,例如,绝缘栅双极晶体管(insulated gate bipolar transistor,igbt)器件、集成栅极换向晶闸管(integrated gate commutated thyristor,igct)器件、栅极可关断晶闸管(gate turn-off thyristor,gto)器件、可控硅(silicon controlled rectifier,scr)器件、结栅场效应晶体管(junction gate field-effect transistor,jfet)器件、mos控制晶闸管(mos controlled thyristor,mct)器件等。
48.应当注意,尽管图1示出了开关q1-q4实现为单个n型晶体管,但本领域技术人员将认识到可能存在许多变化、修改和替代。例如,根据不同的应用和设计需要,开关q1-q4可以实现为p型晶体管。此外,图1中所示的每个开关可以实现为并联连接的多个开关。此外,电容器可以与另一个开关并联连接以实现零电压开关(zero voltage switching,zvs)/零电流开关(zero current switching,zcs)。
49.第一三电平功率变换器100包括两个不同的工作模式,即低占空比模式和高占空比模式。第一三电平功率变换器100的占空比为第一开关q1的占空比。q2的占空比等于q1的占空比。q1的栅极驱动信号的前沿和q2的栅极驱动信号的前沿之间存在180度相移。q4的栅极驱动信号与栅极驱动信号q1互补。q3的栅极驱动信号与栅极驱动信号q2互补。
50.在一些实施例中,当第一三电平功率变换器100以低占空比模式工作时,第一三电平功率转换器100的占空比介于0%至50%的范围内。另一方面,当第一三电平功率变换器100以高占空比模式工作时,第一三电平功率转换器100的占空比介于50%至100%之间。下面将分别结合图2-3描述第一三电平功率变换器100的低占空比模式和高占空比模式的详细工作原理。
51.图1还示出了控制器102。控制器102可以实现为任何合适的控制器,例如微处理器等。控制器102检测各种工作参数(例如,输入电压vin、输出电压vo、跨飞电容cb的电压、负载电流、其任意组合等)。基于检测到的工作参数,控制器102确定如图1所示的开关q1-q4的栅极驱动信号。
52.在一些实施例中,控制器102用于检测输入电压vin。更具体地,控制器102用于检测输入电压的一半的电压电平(vin/2)。该电压电平(vin/2)可以通过合适的传感器装置获得。例如,该电压电平(vin/2)可以通过连接在输入电压总线vin和地之间的电阻分压器获得。控制器102还用于检测跨飞电容cb的电压。基于检测到的电压信号vin/2和vcb,控制器102相应地确定开关q1、q2、q3和q4的栅极驱动信号。下面将参照图2-图4描述控制器102的详细工作原理。
53.图2示出了根据本公开各种实施例的第一三电平功率变换器的低占空比模式的pwm控制时序图。图2的横轴代表时间间隔,共有六个纵轴。第一纵轴y1代表第一开关q1的栅极驱动信号。第二纵轴y2代表第二开关q2的栅极驱动信号。第三纵轴y3代表第三开关q3的栅极驱动信号。第四纵轴y4代表第四开关q4的栅极驱动信号。第五纵轴y5代表节点swb上的电压。第六纵轴y6代表流经电感器lo的电流。
54.如图2所示,第一三电平功率变换器100的一个开关周期可以分为四个阶段。第一阶段从0到d
·
ts,其中d和ts分别是第一三电平功率变换器100的占空比和开关周期。第二阶段从d
·
ts到ts/2。第三阶段从ts/2到(ts/2+d
·
ts)。第四阶段从(ts/2+d
·
ts)到ts。
55.如图2所示,第一开关q1的占空比等于第二开关q2的占空比。第一开关q1的占空比介于0到50%的范围内。在一些实施例中,d等于输出电压vo与输入电压vin的比率。第四开
关q4的栅极驱动信号与第一开关q1的栅极驱动信号互补。第四开关q3的栅极驱动信号与第一开关q2的栅极驱动信号互补。如图2所示,第一开关q1的栅极驱动信号的前沿与第二开关q2的栅极驱动信号的前沿之间存在延迟。该延迟等于开关周期的一半。同样地,第四开关q4的栅极驱动信号的前沿与第三开关q3的栅极驱动信号的前沿之间的延迟等于开关周期的一半。
56.在第一阶段期间,开关q2和q4关闭,开关q1和q3打开,如图2所示。由于打开开关q1和q3,vin和vo之间建立了导电路径。导电路径由开关q1、飞电容cb、开关q3和输出电感器lo形成。电流通过导电路径从输入电源vin流向输出电压vo。节点swb上的电压等于vin/2,如图2所示。
57.在第一阶段期间,对飞电容cb充电,能量相应地存储在飞电容cb中。流经电感器lo的电流可能会增大或减小,具体取决于跨电感器lo施加的电压。在一些实施例中,当输入电压vin大于跨飞电容cb的电压与输出电压vo的总和时,流经电感器lo的电流增大,储存在电感器lo中的能量相应地增加。电感器lo的电流斜率s满足以下等式:
58.s=(vin-vcb-vo)/lo
ꢀꢀ
(1)
59.其中,vcb是跨飞电容cb的电压。
60.在第二阶段期间,开关q1和q2关闭,开关q3和q4打开。由于打开开关q3和q4,vo和地之间建立了导电路径。导电路径由开关q4、开关q3和输出电感器lo形成。在一些实施例中,开关q4为流经输出电感器lo的电流提供了续流路径。节点swb上的电压等于0,如图2所示。
61.在第二阶段期间,飞电容cb被关闭的开关q1和q2隔离。流经电感器lo的电流减小,存储在电感器lo中的能量相应地减少。电感器lo的电流斜率s满足以下等式:
62.s=-vo/lo
ꢀꢀ
(2)
63.在第三阶段期间,开关q1和q3关闭,开关q2和q4打开。由于打开开关q2和q4,vo和地之间建立了导电路径。导电路径由开关q4、飞电容cb、开关q2和输出电感器lo形成。节点swb上的电压等于vin/2,如图2所示。
64.在第三阶段期间,电流对飞电容放电,存储在飞电容cb中的能量相应地减少。在一些实施例中,流经电感器lo的电流可能增大,存储在电感器lo中的能量相应地增加。在第三阶段,电感器lo的电流斜率s满足以下等式:
65.s=(vcb-vo)/lo
ꢀꢀ
(3)
66.在第四阶段期间,开关q1和q2关闭,开关q3和q4打开。由于打开开关q3和q4,vo和地之间建立了导电路径。导电路径由开关q4、开关q3和输出电感器lo形成。在一些实施例中,开关q4为流经输出电感器lo的电流提供了续流路径。节点swb上的电压等于0,如图2所示。
67.在第四阶段期间,飞电容cb被关闭的开关q1和q2隔离。流经电感器lo的电流减小,存储在电感器lo中的能量相应地减少。在第四阶段,电感器lo的电流斜率s满足以下等式:
68.s=-vo/lo
ꢀꢀ
(4)
69.图3示出了根据本公开各种实施例的第一三电平功率变换器的高占空比模式的pwm控制时序图;图3的横轴代表时间间隔,共有六个纵轴。第一纵轴y1代表第一开关q1的栅极驱动信号。第二纵轴y2代表第二开关q2的栅极驱动信号。第三纵轴y3代表第三开关q3的
栅极驱动信号。第四纵轴y4代表第四开关q4的栅极驱动信号。第五纵轴y5代表节点swb上的电压。第六纵轴y6代表流经电感器lo的电流。
70.如图3所示,第一三电平功率变换器100的一个开关周期可以分为四个阶段。第一阶段从0到(d
·
ts-ts/2)。第二阶段从(d
·
ts-ts/2)到ts/2。第三阶段从ts/2到d
·
ts。第四阶段从d
·
ts到ts。
71.如图3所示,第一开关q1的占空比等于第二开关q2的占空比。第一开关q1的占空比介于50%到100%之间。在一些实施例中,d等于输出电压vo与输入电压vin的比率。第四开关q4的栅极驱动信号与第一开关q1的栅极驱动信号互补。第四开关q3的栅极驱动信号与第一开关q2的栅极驱动信号互补。如图3所示,第一开关q1的栅极驱动信号的前沿与第二开关q2的栅极驱动信号的前沿之间存在延迟。该延迟等于开关周期的一半。同样地,第三开关q3的栅极驱动信号的前沿与第四开关q4的栅极驱动信号的前沿之间的延迟等于开关周期的一半。
72.在第一阶段期间,开关q3和q4关闭,开关q1和q2打开,如图3所示。由于打开开关q1和q2,vin和vo之间建立了导电路径。导电路径由开关q1、开关q2和输出电感器lo形成。电流通过导电路径从输入电源vin流向输出电压vo。节点swb上的电压等于vin,如图3所示。
73.在第一阶段期间,流经电感器lo的电流可能增大,存储在电感器lo中的能量相应地增加。电感器lo的电流斜率s满足以下等式:
74.s=(vin-vo)/lo
ꢀꢀ
(5)
75.在第二阶段期间,开关q2和q4关闭,开关q1和q3打开,如图3所示。由于打开开关q1和q3,vin和vo之间建立了导电路径。导电路径由开关q1、飞电容cb、开关q3和输出电感器lo形成。电流通过导电路径从输入电源vin流向输出电压vo。节点swb上的电压等于vin/2,如图3所示。
76.在第二阶段期间,对飞电容cb充电,能量相应地存储在飞电容cb中。流经电感器lo的电流可能会增大或减小,具体取决于跨电感器lo施加的电压。在一些实施例中,当输入电压vin小于跨飞电容cb的电压与输出电压vo的总和时,流经电感器lo的电流减小,储存在电感器lo中的能量相应地减少。电感器lo的电流斜率s满足以下等式:
77.s=(vin-vcb-vo)/lo
ꢀꢀ
(6)
78.在第三阶段期间,开关q3和q4关闭,开关q1和q2打开,如图3所示。由于打开开关q1和q2,vin和vo之间建立了导电路径。导电路径由开关q1、开关q2和输出电感器lo形成。电流通过导电路径从输入电源vin流向输出电压vo。节点swb上的电压等于vin,如图3所示。
79.在第三阶段期间,流经电感器lo的电流可能增大,存储在电感器lo中的能量相应地增加。电感器lo的电流斜率s满足以下等式:
80.s=(vin-vo)/lo
ꢀꢀ
(7)
81.在第四阶段期间,开关q1和q3关闭,开关q2和q4打开。由于打开开关q2和q4,vo和地之间建立了导电路径。导电路径由开关q4、飞电容cb、开关q2和输出电感器lo形成。节点swb上的电压等于vin/2,如图3所示。
82.在第四阶段期间,电流对飞电容放电,存储在飞电容cb中的能量相应地减少。在一些实施例中,流经电感器lo的电流可能减小,存储在电感器lo中的能量相应地减少。在第四阶段,电感器lo的电流斜率s满足以下等式:
83.s=(vcb-vo)/lo
ꢀꢀ
(8)
84.在第一三电平功率变换器100中,期望保持电压平衡。特别地,图1中所示的控制器102用于控制第一三电平功率变换器100的工作以保持跨飞电容cb上的电压等于输入电压vin的一半。这种电压平衡有助于保持第一三电平功率变换器100按照预期高效且安全地工作。
85.在中,控制器102通过主反馈控制回路确定第一三电平功率转换器100的占空比。占空比直接应用于开关q1。为了实现电容器电压平衡,通过本地反馈控制回路获得占空比变化。来自主反馈控制回路的占空比和来自本地反馈控制回路的占空比变化之和应用于开关q2。占空比变换有助于保持跨飞电容cb上的电压等于输入电压vin的一半。下面将参照图4描述该电容器电压平衡控制方法的详细工作原理。
86.图4示出了根据本公开各种实施例的一种控制图1所示的第一三电平功率变换器的方法的流程图。图4所示的流程图仅为示例,不应过度限制权利要求的范围。本领域普通技术人员将认识到很多变型、替代和修改。例如,可以添加、移除、替换、重新排列和重复图4中所示的各个步骤。
87.为了实现电容器电压平衡,一种基于试错的控制方法应用于第一三电平功率变换器100,如图1所示。通过使用基于试错的控制方法,动态调整一个开关(例如,第二开关)的打开时间以平衡跨飞电容cb的电压。
88.第一三电平功率变换器100由主控制回路(未示出)控制。主控制回路用于使得确定合适的占空比以调节第一三电平功率变换器100的输出电压和/或电流。图4示出的基于试错的控制方法用作本地控制回路。本地控制回路用于使得基于跨飞电容cb的电压修改主控制回路生成的占空比。通过修改占空比,可以动态调整跨飞电容的电压,从而实现电容器电压平衡。
89.在步骤402,初始化过程应用于第一三电平功率变换器。作为调整跨飞电容的电压的第一步,控制器将k设置为等于1。δton(1)等于零。δton(1)是调整跨飞电容的电压的第一步中的占空比变化。第一步,设置第一开关q1的打开时间为d(1)
·
ts,其中d(1)为主控制回路产生的占空比,ts为预定的开关周期。同样在第一步中,将第二开关q2的打开时间设置为d(1)
·
ts与δton(1)之和。
90.在第一步中,sgn(1)设置为1,其中sgn是一个试错方向指示器。sgn可以设置为1或-1,具体取决于在这个基于试错的控制过程中是否降低了不平衡的电容器电压。下面将参照步骤408-412描述确定sgn值的详细工作原理。
91.在第一步中,控制器用于检测输入电压vin。更具体地,控制器用于通过合适的分压器电路检测输入电压的一半(vin/2)。第一步中感应到的输入电压的一半定义为vin(1)/2,如图4所示。此外,控制器还用于检测跨飞电容的电压。第一步中感测到的跨飞电容的电压定义为vcb(1),如图4所示。
92.在步骤404,在完成步骤402的初始化过程后,控制器继续进行步骤404,其中,控制器通过以下等式确定占空比变化:
93.δton(k)=δton(k-1)+sgn(k-1)
×
tstep
ꢀꢀ
(9)
94.其中,k为大于或等于2的整数,tstep是预定的持续时间。在一些实施例中,tstep设置为4纳秒。
95.同样在步骤404,控制器通过以下等式确定第一开关q1和第二开关q2的占空比:
96.ton1(k)=d(k)
×
ts
ꢀꢀ
(10)
97.ton2(k)=d(k)
×
ts+δton(k)
ꢀꢀ
(11)
98.其中,ton1是第一开关q1的打开时间,ton2是第二开关q2的打开时间。
99.在步骤406,控制器用于再次检测输入电压的一半(vin(k)/2)和跨飞电容的电压(vcb(k))。
100.在步骤408,控制器确定vin(k)/2和vcb(k)之间的差值的绝对值是否大于或等于从前步骤中获得的这两个值之间的差值的绝对值。如果vin(k)/2和vcb(k)之间的差值的绝对值大于或等于前步骤中获得的这两个值之间的差值的绝对值,则该方法进行到步骤410,其中,sgn(k)设置为等于-1
×
sgn(k-1)的值。否则,该方法进行到步骤412,其中,sgn(k)设置为等于sgn(k-1)的值。在确定步骤410或412的sgn的值之后,该方法回到步骤404并再次重复步骤404-412。通过图4所示的这种基于试错的控制过程,该方法能够实现电容器电压平衡。
101.需要说明的是,图4所示的控制方法中的k(k=1,2,3,
……
,n-1,n,n+1,
……
)可以对应一个开关周期,也可以对应多个开关周期。例如,图4所示的控制方法可以在每个开关周期或每隔一个开关周期调整一次δton。
102.还需要注意的是,图4的流程图中使用的控制方法仅示出采用tstep来改变δton这种最简单的情况。在一些实施例中,tstep设置为小的常数,例如4纳秒。这个恒定时间步长tstep的选择需要同时考虑电容器电压控制回路(本地控制回路)的精度和速度。此外,还可以使用可变时间步长的方法来加快对δton的调整速度,使得跨飞电容的电压收敛得更快,更接近vin/2。
103.还需要说明的是,第二开关q2的打开时间调整仅仅是一个示例。本领域技术人员将理解可能存在许多备选方案、修改和变化。例如,控制方法可以同时调整q1的打开时间和q2的打开时间。打开时间调整步骤(步骤404)可以通过以下等式进行修改:
104.ton1(k)=d(k)
×
ts-δton(k)
ꢀꢀ
(12)
105.ton2(k)=d(k)
×
ts+δton(k)
ꢀꢀ
(13)
106.在替代实施例中,打开时间调整步骤(步骤404)可以通过以下等式进行修改:
107.ton1(k)=d(k)
×
ts+δton(k)
ꢀꢀ
(14)
108.ton2(k)=d(k)
×
ts-δton(k)
ꢀꢀ
(15)
109.图5示出了根据本公开各种实施例的第二三电平功率变换器的示意图。第二三电平功率变换器200包括第一开关q1、第二开关q2、第三开关q3、第四开关q4、第一输入电容器cin1、第二输入电容器cin2、输出电感器lo和输出电容器co。如图5所示,输出电感器lo和输出电容器co形成一个输出滤波器。输出电感器lo和输出电容器co的公共节点为第二三电平功率变换器200的输出端(vo)。
110.第一开关q1、第二开关q2、第三开关q3和第四开关q4串联在输入电压源vin和地之间。在整个描述过程中,vin也称为输入电压总线。第一开关q1和第二开关q2的公共节点表示为swa,如图5所示。同样地,第二开关q2和第三开关q3的公共节点表示为vi_mid。第三开关q3和第四开关q4的公共节点表示为swb。如图5所示,输出滤波器连接在swa和swb之间。
111.第一输入电容器cin1和第二输入电容器cin2串联连接在输入电压源vin和地之
间。第一输入电容器cin1和第二输入电容器cin2的公共节点连接到vi_mid,如图5所示。第一输入电容器cin1和第二输入电容器cin2用作分压器。在节点vi_mid的电压等于输入电压vin的一半。第一输入电容器cin1也称为第一分压电容器。第二输入电容器cin2也称为第二分压电容器。
112.在工作中,控制器202能够保持跨第一输入电容器cin1的电压等于跨第二输入电容器cin2的电压。第一输入电容器cin1和第二输入电容器cin2的公共节点是第二三电平功率变换器200的中点。vi_mid也称为第二三电平功率变换器200的中点电压。
113.第二三电平功率变换器200包括三个电压电平。第一电压电平是来自输入电压vin的电压。第二电压电平等于vi_mid的电压,其等于输入电压vin的一半。第三电压电平等于零。
114.根据一个实施例,开关(例如,开关q1-q4)可以是金属氧化物半导体场效应晶体管(mosfet)器件。可替代地,开关元件可以是任何可控制的开关,例如,绝缘栅双极晶体管(igbt)器件、集成栅极换向晶闸管(igct)器件、栅极可关断晶闸管(gto)器件、可控硅(scr)器件、结栅场效应晶体管(jfet)器件、mos控制晶闸管(mct)器件等。
115.应当注意,尽管图5示出了开关q1-q4实现为单个n型晶体管,但本领域技术人员将认识到可能存在许多变化、修改和替代。例如,根据不同的应用和设计需要,开关q1-q4可以实现为p型晶体管。此外,图5中所述的每个开关可以实现为并联连接的多个开关。此外,电容器可以与另一个开关并联连接以实现零电压开关(zvs)/零电流开关(zcs)。
116.第二三电平功率变换器200包括两个不同的工作模式,即低占空比模式和高占空比模式。第二三电平功率变换器200的占空比为第一开关q1的占空比。第四开关q4的占空比等于第一开关q1的占空比。q1的栅极驱动信号的前沿和q4的栅极驱动信号的前沿之间存在180度相移。q2的栅极驱动信号与栅极驱动信号q1互补。q3的栅极驱动信号与栅极驱动信号q4互补。
117.在一些实施例中,当第二三电平功率变换器200以低占空比模式工作时,第二三电平功率转换器200的占空比介于0%至50%之间。另一方面,当第二三电平功率变换器200以高占空比模式工作时,第二三电平功率转换器200的占空比介于50%至100%之间。下面将分别结合图6-7描述低占空比模式和高占空比模式的详细工作原理。
118.图5还示出了控制器202。控制器202可以实现为任何合适的控制器,例如微处理器等。控制器202检测各种工作参数(例如,输入电压vin、输出电压vo、跨飞电容cb的电压、负载电流、其任意组合等)。基于检测到的工作参数,控制器202确定如图5所示的开关q1-q4的栅极驱动信号。
119.控制器202用于检测输入电压vin。更具体地,控制器202用于检测输入电压的一半的电压电平(vin/2)。该电压电平(vin/2)可以通过传感器装置获得。例如,该电压电平以通过连接在vin和地之间的电阻分压器获得。控制器202还用于检测中点电压vi_mid。基于检测到的电压信号,控制器202相应地确定开关q1、q2、q3和q4的栅极驱动信号。下面将参照图6-8描述控制器202的详细工作原理。
120.图6示出了根据本公开各种实施例的应用于第二三电平功率变换器的第一pwm控制时序图。图2的横轴代表时间间隔,共有六个纵轴。第一纵轴y1代表第一开关q1的栅极驱动信号。第二纵轴y2代表第四开关q4的栅极驱动信号。第三纵轴y3代表第三开关q3的栅极
驱动信号。第四纵轴y4代表第二开关q2的栅极驱动信号。第五纵轴y5代表swa和swb之间的电压差。第六纵轴y6代表流经电感器lo的电流。
121.如图6所示,第二三电平功率变换器200的一个开关周期可以分为四个阶段。第一阶段从0到d
·
ts,其中d和ts分别是第一三电平功率变换器200的占空比和开关周期。第二阶段从d
·
ts到ts/2。第三阶段从ts/2到(ts/2+d
·
ts)。第四阶段从(ts/2+d
·
ts)到ts。
122.如图6所示,第一开关q1的占空比等于第四开关q4的占空比。第一开关q1的占空比介于0到50%之间。在一些实施例中,d等于输出电压vo与输入电压vin的比率。第二开关q2的栅极驱动信号与第一开关q1的栅极驱动信号互补。第三开关q3的栅极驱动信号与第四开关q1的栅极驱动信号互补。如图6所示,第一开关q1的栅极驱动信号的前沿与第四开关q4的栅极驱动信号的前沿之间存在延迟。该延迟等于开关周期的一半。同样地,第二开关q2的栅极驱动信号的前沿与第三开关q3的栅极驱动信号的前沿之间的延迟等于开关周期的一半。
123.在第一阶段期间,开关q2和q4关闭,开关q1和q3打开,如图6所示。由于打开开关q1和q3,vin和vi_mid之间建立了导电路径。导电路径由开关q1,输出电感器lo和开关q3形成。电流通过导电路径从输入电源vin流向输出电压vo。swa和swb之间的电压差等于vin/2,如图6所示。
124.在第一阶段期间,对第二输入电容器cin2充电,对输入电容器cin1放电。流经电感器lo的电流可能增大,存储在电感器lo中的能量相应地增加。电感器lo的电流斜率s满足以下等式:
125.s=(vin-vo-vi_mid)/lo
ꢀꢀ
(16)
126.在第二阶段期间,开关q1和q4关闭,开关q2和q3打开。由于打开开关q2和q3,建立了导电路径。导电路径由开关q2、输出电感器lo、输出电容器co和开关q3形成。在一些实施例中,开关q2和q3为流经输出电感器lo的电流提供了续流路径。swa和swb之间的电压差等于0,如图6所示。
127.在第二阶段期间,流经电感器lo的电流减小,存储在电感器lo中的能量相应地减少。电感器lo的电流斜率s满足以下等式:
128.s=-vo/lo
ꢀꢀ
(17)
129.在第三阶段期间,开关q1和q3关闭,开关q2和q4打开。由于打开开关q2和q4,vi_mid和地之间建立了导电路径。导电路径由开关q2、输出电感器lo、输出电容器co和开关q4形成。swa和swb之间的电压差等于vin/2,如图6所示。
130.在第三阶段期间,电流对第二输入电容器cin2放电,存储在第二输入电容器cin2中的能量相应地减少。在一些实施例中,流经电感器lo的电流可能增大,存储在电感器lo中的能量相应地增加。在第三阶段,电感器lo的电流斜率s满足以下等式:
131.s=(vi_mid-vo)/lo
ꢀꢀ
(18)
132.在第四阶段期间,开关q1和q4关闭,开关q2和q3打开。由于打开开关q2和q3,建立了导电路径。导电路径由开关q2、输出电感器lo、输出电容器co和开关q3形成。在一些实施例中,开关q2和q3为流经输出电感器lo的电流提供了续流路径。swa和swb之间的电压差等于0,如图6所示。
133.在第四阶段期间,流经电感器lo的电流减小,存储在电感器lo中的能量相应地减少。在第四阶段,电感器lo的电流斜率s满足以下等式:
134.s=-vo/lo
ꢀꢀ
(19)
135.图7示出了根据本公开各种实施例的应用于第二三电平功率变换器的第二pwm控制时序图。图7的横轴代表时间间隔,共有六个纵轴。第一纵轴y1代表第一开关q1的栅极驱动信号。第二纵轴y2代表第四开关q4的栅极驱动信号。第三纵轴y3代表第三开关q3的栅极驱动信号。第四纵轴y4代表第二开关q2的栅极驱动信号。第五纵轴y5代表swa和swb之间的电压差。第六纵轴y6代表流经电感器lo的电流。
136.如图7所示,第二三电平功率变换器200的一个开关周期可以分为四个阶段。第一阶段是从0到(d
·
ts-ts/2)。第二阶段是从(d
·
ts-ts/2)到ts/2。第三阶段是从ts/2到d
·
ts。第四阶段是从d
·
ts到ts。
137.如图7所示,第一开关q1的占空比等于第四开关q4的占空比。第一开关q1的占空比介于50%到100%之间。在一些实施例中,d等于输出电压vo与输入电压vin的比率。第二开关q2的栅极驱动信号与第一开关q1的栅极驱动信号互补。第三开关q3的栅极驱动信号与第四开关q1的栅极驱动信号互补。如图7所示,第一开关q1的栅极驱动信号的前沿与第四开关q4的栅极驱动信号的前沿之间存在延迟。该延迟等于开关周期的一半。同样地,第三开关q3的栅极驱动信号的前沿与第二开关q2的栅极驱动信号的前沿之间的延迟等于开关周期的一半。
138.在第一阶段期间,开关q2和q3关闭,开关q1和q4打开,如图7所示。由于打开开关q1和q4,vin和地之间建立了导电路径。导电路径由开关q1、输出电感器lo、输出电容器co和开关q4形成。电流通过导电路径从输入电源vin流向地。swa和swb之间的电压差等于vin,如图7所示。
139.在第一阶段期间,流经电感器lo的电流可能增大,存储在电感器lo中的能量相应地增加。电感器lo的电流斜率s满足以下等式:
140.s=(vin-vo)/lo
ꢀꢀ
(20)
141.在第二阶段期间,开关q2和q4关闭,开关q1和q3打开,如图7所示。由于打开开关q1和q3,vin和vi_mid之间建立了导电路径。导电路径由开关q1、输出电感器lo、输出电容器co和开关q3形成。电流通过导电路径从输入电源vin流向vi_mid。swa和swb之间的电压差等于vin/2,如图7所示。
142.在第二阶段期间,对第二输入电容器cin2充电,能量相应地存储在第二输入电容器cin2中。流经电感器lo的电流可能会增大或减小,具体取决于跨电感器lo施加的电压。在一些实施例中,当输入电压vin小于跨第二输入电容器cin2上的电压与输出电压vo的和时,流经电感器lo的电流减小,储存在电感器lo中的能量相应地减少。电感器lo的电流斜率s满足以下等式:
143.s=(vin-vo-vi_mid)/lo
ꢀꢀ
(21)
144.在第三阶段期间,开关q2和q3关闭,开关q1和q4打开,如图7所示。由于打开开关q1和q4,vin和地之间建立了导电路径。导电路径由开关q1、输出电感器lo、输出电容器co和开关q4形成。电流通过导电路径从输入电源vin流向地。swa和swb之间的电压差等于vin,如图7所示。
145.在第三阶段期间,流经电感器lo的电流可能增大,存储在电感器lo中的能量相应地增加。电感器lo的电流斜率s满足以下等式:
146.s=(vin-vo)/lo
ꢀꢀ
(22)
147.在第四阶段期间,开关q1和q3关闭,开关q2和q4打开。由于打开开关q2和q4,vi_mid和地之间建立了导电路径。导电路径由开关q2、输出电感器lo、输出电容器co和开关q4形成。swa和swb之间的电压差等于vin/2,如图7所示。
148.在第四阶段期间,电流对第二输入电容器cin2放电,存储在第二输入电容器cin2中的能量相应地降低。在一些实施例中,流经电感器lo的电流可能减小,存储在电感器lo中的能量相应地减少。在第四阶段,电感器lo的电流斜率s满足以下等式:
149.s=(vi_mid-vo)/lo
ꢀꢀ
(23)
150.在第二三电平功率变换器200中,期望保持电压平衡。特别地,控制器用于202控制第二三电平功率变换器200的工作,从而保持节点vi_mid上的电压等于输入电压vin的一半。这种电压平衡有助于保持第二三电平功率变换器200按照预期高效且安全地工作。
151.在工作中,控制器202通过主反馈控制回路确定第二三电平功率转换器200的占空比。占空比直接应用于开关q1。为了实现电容器电压平衡,通过本地反馈控制回路获得占空比变化。来自主反馈控制回路的占空比和来自本地反馈控制回路的占空比变化之和应用于开关q4。占空比变换有助于保持节点vi_mid上的电压等于输入电压的一半。下面将参照图8描述该电容器电压平衡控制方法的详细工作原理。
152.图8示出了根据本公开各种实施例的一种控制图5所示的第二三电平功率变换器的方法的流程图。图8所示的流程图仅为示例,不应过度限制权利要求的范围。本领域普通技术人员将认识到很多变型、替代和修改。例如,可以添加、移除、替换、重新排列和重复图8中所示的各个步骤。
153.为了实现电容器电压平衡,一种基于试错的控制方法应用于第二三电平功率变换器器,如图5所示。通过使用基于试错的控制方法,动态调整一个开关(例如,第四开关q4)的打开时间以平衡跨第一输入电容器cin1上的电压和/或跨第二输入电容器cin2上的电压。换句话说,采用基于试错的控制方法来保持中点电压vi_mid等于输入电压的一半。
154.第二三电平功率变换器200由主控制回路(未示出)控制。主控制回路用于使得确定合适的占空比以调节第二三电平功率变换器200的输出电压和/或电流。图8示出的基于试错的控制方法用作本地控制回路。本地控制回路用于使得基于节点vi_mid上的电压修改主控制回路生成的占空比。通过修改占空比,可以动态调整节点vi_mid上的电压,从而实现电容器电压平衡。
155.在步骤802,初始化过程应用于第二三电平功率变换器。作为调整在节点vi_mid的电压的第一步,控制器将k设置为等于1。δton(1)等于零。δton(1)是调整在节点vi_mid的电压的第一步中的占空比变化。第一步,设置第一开关q1的打开时间为d(1)
·
ts,其中d(1)为主控制回路产生的占空比,ts为预定的开关周期。同样在第一步中,将第四开关q4的打开时间(图8所示的ton4(1))设置为d(1)
·
ts和δton(1)之和。
156.在第一步中,sgn(1)设置为1,其中sgn是一个试错方向指示器。sgn可以设置为1或-1,具体取决于在这个基于试错的控制过程中是否降低了不平衡的电容器电压。下面将参照步骤808-812描述确定sgn值的详细工作原理。
157.在第一步中,控制器用于检测输入电压vin。更具体地,控制器用于通过合适的分压器电路检测输入电压的一半(vin/2)。第一步中感应到的输入电压的一半定义为vin(1)/
2,如图8所示。此外,控制器还用于检测节点vi_mid上的电压。第一步中感测到的节点vi_mid上的电压定义为vi_mid(1),如图8所示。
158.在步骤804,在完成步骤802的初始化过程后,控制器通过以下等式确定占空比变化:
159.δton(k)=δton(k-1)+sgn(k-1)
×
tstep
ꢀꢀ
(24)
160.其中,k为大于或等于2的整数,tstep是预定的持续时间。在一些实施例中,tstep设置为4纳秒。
161.同样在步骤804,控制器通过以下等式确定第一开关q1和第四开关q4的占空比:
162.ton1(k)=d(k)
×
ts
ꢀꢀ
(25)
163.ton4(k)=d(k)
×
ts+δton(k)
ꢀꢀ
(26)
164.其中,on1是第一开关q1的打开时间,ton4是第四开关q4的打开时间。
165.在步骤806,控制器用于再次检测输入电压(vin(k)/2)的一半和在节点vi_mid的电压(vi_mid(k))。
166.在步骤808,控制器确定vin(k)/2和vi_mid(k)之间的差值的绝对值是否大于或等于从前步骤中获得的这两个值之间的差值的绝对值。如果vin(k)/2和vi_mid(k)之间的差值的绝对值大于或等于前步骤中获得的这两个值之间的差值的绝对值,则该方法进行到步骤810,其中,sgn(k)设置为等于-1
×
sgn(k-1)的值。否则,该方法进行到步骤812,其中,sgn(k)设置为等于sgn(k-1)的值。在确定步骤810或812的sgn的值之后,该方法回到步骤804。
167.需要说明的是,图8所示的控制方法中的k(k=1,2,3,
……
,n-1,n,n+1,
……
)可以对应一个开关周期,也可以对应多个开关周期。例如,图8所示的控制方法可以在每个开关周期或每隔一个开关周期调整一次δton。
168.还需要注意的是,图8的流程图中使用的控制方法仅示出采用tstep来改变δton这种最简单的情况。在一些实施例中,tstep设置为小的常数,例如4纳秒。这个恒定时间步长tstep的选择需要同时考虑电容器电压控制回路(本地控制回路)的精度和速度。此外,没还可以使用可变时间步长的方法来加快对δton的调整速度,使跨输入电容器(例如cin2)的电压收敛得更快,更接近vin/2。
169.图8所示的控制方法适用于所有只需要调节和/或平衡一个电压的三电平功率变换器。此外,这些控制方法也适用于需要双向功率处理的应用。
170.还需要说明的是,第二开关q4的打开时间调整仅仅是一个示例。本领域技术人员将理解可能存在许多备选方案、修改和变化。例如,控制方法可以同时调整q1的打开时间和q4的打开时间。打开时间调整步骤(步骤804)可以通过以下等式进行修改:
171.ton1(k)=d(k)
×
ts-δton(k)
ꢀꢀ
(27)
172.ton4(k)=d(k)
×
ts+δton(k)
ꢀꢀ
(28)
173.在替代实施例中,打开时间调整步骤(步骤404)可以通过以下等式进行修改:
174.ton1(k)=d(k)
×
ts+δton(k)
ꢀꢀ
(29)
175.ton4(k)=d(k)
×
ts-δton(k)
ꢀꢀ
(30)
176.图9示出了根据本公开各种实施例的一种控制电容器电压的反馈控制回路。在一些实施例中,延迟时间tdelay用作控制变量以通过负反馈回路控制电容器电压平衡。延迟时间tdelay是两个栅极驱动信号之间的相移。作为三电平功率变换器中的相移,延迟时间
tdelay对电容器电压不平衡的影响对于任何工作条件和电路参数而言总是单向且单调的。即使三电平功率变换器在不同的负载方向上工作,tdelay的单向且单调的行为也是有效的。例如,对于有飞电容的三电平功率变换器,如果延迟时间tdelay大于开关周期的一半(ts/2),并假设所有其他电路参数对称,则跨飞电容的电压总是大于vin/2。这种关系在双向功率流下仍然有效。
177.图9所示的反馈控制环路基于图1所示的第一三电平电源变换器。图9所示的反馈控制回路包括比较单元901、反馈补偿网络传递函数902、求和单元903和相移到电容器电压传递函数904。如图9所示,比较单元901、反馈补偿网络传递函数902、求和单元903和相移到电容器电压传递函数904级联连接。
178.将代表跨飞电容cb的电压的信号vc(s)与飞电容参考电压信号vcref(s)在比较单元901处进行比较。vcref(s)和vc(s)之间的差馈入到反馈补偿网络传递函数902。基于负反馈控制方法,反馈补偿网络传递函数902产生合适的延迟δtdelay(s)以校正跨飞电容cb的电压。由于第二开关q2的栅极驱动信号与第一开关q1的栅极驱动信号具有相移(180度),因此将适当的延迟(ts/2)添加到求和单元903的反馈控制回路中。求和单元903产生相移tdelay(s),其被馈送到相移到电容器电压传递函数904。相移到电容器电压传递函数904基于接收到的相移tdelay(s)调整跨飞电容cb的电压。
179.图9所示的控制方法适用于所有只需要调节和/或平衡一个电压的三电平功率变换器。此外,该控制方法也适用于需要双向功率处理的应用。
180.应当注意的是,图9中所示的负反馈回路只是一个示例。本领域技术人员将理解可能存在许多备选方案、修改和变化。例如,图9所示的反馈回路也适用于图5所示的第二三电平功率变换器。
181.图10示出了根据本公开各种实施例的基于图9所示的反馈控制回路的控制时序图。图10的横轴代表时间间隔,共有六个纵轴。第一纵轴y1代表第一开关q1的栅极驱动信号。第二纵轴y2代表第二开关q2的栅极驱动信号。第三纵轴y3代表第三开关q3的栅极驱动信号。第四纵轴y4代表第四开关q4的栅极驱动信号。第五纵轴y5代表节点swb上的电压,如图1所示。第六纵轴y6代表流经电感器lo的电流。
182.如图10所示,第一三电平功率变换器100的一个开关周期可以分为四个阶段。第一阶段从0到(d
·
ts-ts/2)。第二阶段从(d
·
ts-ts/2)到ts/2。第三阶段从ts/2到d
·
ts。第四阶段从d
·
ts到ts。
183.图10所示的控制时序图与图3所示的控制时序图类似,除了延迟δtdelay应用于第二开关q2的栅极驱动信号。图9所示的反馈控制回路产生延迟δtdelay。延迟δtdelay应用于第二开关q2的栅极驱动信号。如图10所示,第二开关q2的栅极驱动信号的前沿开始于ts/2+δtdelay。相比之下,在图3中,第二开关q2的栅极驱动信号的前沿开始于ts/2。q2和q3的栅极驱动信号是两个互补的信号。作为延迟δtdelay应用于q2的栅极驱动信号的结果,对q3的栅极驱动信号进行相应地修改。响应于添加到q2和q3中的延迟,在节点swb的电压和流经输出电感器lo的电流可能会发生变化,如图10所示。
184.与图3所示的时序图相比,第一阶段期间流经飞电容cb的电荷没有变化。然而,在修改的第三阶段(从(ts/2+δtdelay)到(d
×
ts+δtdelay))期间流出飞电容cb的放电电流减小。这种减小的放电电流有助于增加跨飞电容cb的电压。通过将该减小的放电电流应用
于飞电容cb,跨飞电容的电压增加到大于输入电压的一半的电压电平。
185.虽然已经详细描述了本公开的实施例及其优点,但是应当理解的是,在不脱离由所附权利要求限定的本公开的精神和范围的情况下,可以进行各种改变,替换和变更。
186.此外,本技术的范围并非意在限于说明书中描述的过程、机器、制品、物质组成、装置、方法和步骤的特定实施例。所属领域的技术人员根据本公开的公开内容将容易了解,根据本公开可利用目前存在或将来开发的与本文所描述的对应实施例执行大体上相同功能或实现大体上相同结果的过程、机器、制品、物质组成、装置、方法或步骤。因此,所附权利要求旨在其范围内包括这样的流程、机器、生产、物资成分、手段、方法或步骤。相应地,应当简单地将本说明书和附图认为是对所附权利要求所限定的本发明的示意,并且意在覆盖落入本发明的范围内的任何和所有修改、变型、组合或等同替换。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1