一种智能充电系统及其控制方法与流程
1.本技术属于机器人充电技术领域,尤其涉及一种智能充电系统及其控制方法。
背景技术:
2.当前,机器人具备自动充电功能,但是该自动充电功能是基于机器人还有电的情况下,机器人可以自主的找到充电桩,然后对接上充电桩以对自身进行充电。如果机器人本身没有电了,则只能人为的把机器人用手动充电线缆连接到充电桩孔。若机器人处于光线不足的地方,会导致很难对准充电线插座。
3.其次,充电线是一个独立线材,平时机器人没有手动充电需求时,一般是将充电线放在一边的,这样就导致了平时不怎么用,要用时又一下子找不出来的情况。
4.并且,充电桩有伸缩装置把充电电极伸出与机器人本体接触,活动机构昂贵且容易磨损(例如没有对准时会导致受力不均,高低温导致润滑油加速老化,高纬度地区干燥环境导致润滑油风干等),伸缩杆的活动导致充电的大电流线缆选型要求高,经常充电也会导致线缆提前报废。
5.因此,现有的机器人充电技术存在着机器人本身没有电时,无法进行充电,需要借助充电线缆进行连接,导致该方式复杂麻烦的问题。
技术实现要素:
6.有鉴于此,本技术实施例提供了一种智能充电系统及其控制方法,旨在解决现有的机器人充电技术存在着机器人本身没有电时,无法进行充电,需要借助充电线缆进行连接,导致该方式复杂麻烦的问题。
7.本技术实施例的第一方面提供了一种智能充电系统,包括充电桩和机器人本体,所述充电桩被配置为与所述机器人本体进行电性连接时,对所述机器人本体进行充电;
8.其中,所述充电桩包括:
9.第一充电电极组,裸露于所述充电桩的外壳,被配置为受压时,则输出反馈信号;和
10.充电电路,与所述第一充电电极组连接,被配置为接收到所述反馈信号时,输出充电信号以通过所述第一充电电极组对所述机器人本体进行充电;
11.所述机器人本体包括:
12.第二充电电极组,裸露于所述机器人本体的外壳,与所述第一充电电极组配对,被配置为与所述第一充电电极组进行耦接以使所述第一充电电极组受压时,接收所述充电信号;和
13.电池组,与所述第二充电电极组连接,被配置为将所述充电信号转化为电能并进行存储。
14.优选地,所述第一充电电极组包括第一正电极和第一负电极;
15.所述第二充电电极组包括第二正电极和第二负电极;
16.并且,所述第一正电极与所述第二正电极配对,所述第一负电极与所述第二负电极配对。
17.优选地,所述充电电路包括:
18.充电模块,被配置为输出所述充电信号;
19.开关模块,与所述充电模块连接,被配置为进行导通或关断,并在导通时,传输所述充电信号;
20.电极检测模块,与所述第一充电电极组连接,被配置为检测到所述反馈信号时,则判定所述第一充电电极组受压,并输出受压信号;以及
21.主控模块,与所述开关模块及所述电极检测模块连接,被配置为接收到所述受压信号时,控制所述开关模块进行导通,使所述充电信号传输至所述机器人本体,以对所述机器人本体进行充电。
22.优选地,所述充电电路还包括:
23.涓流检测模块,与所述第一充电电极组及所述主控模块连接,被配置为检测到所述充电信号的电流值小于预设值时,输出断电信号至所述主控模块;
24.所述主控模块还被配置为根据所述断电信号,控制所述开关模块进行关断,以停止对所述机器人本体进行充电。
25.优选地,所述电极检测模块包括:
26.第一电极检测单元,被配置为检测所述第一正电极是否受压;和
27.第二电极检测单元,被配置为检测所述第一负电极是否受压;
28.并且,只有在所述第一正电极和所述第一负电极均受压时,所述电极检测模块才输出所述受压信号至所述主控模块。
29.优选地,所述机器人本体还包括:
30.保护模块,与所述第二充电电极组及所述电池组连接,被配置为当所述充电信号的电流值或电压值超过预设阈值时,断开充电回路。
31.优选地,所述开关模块包括:
32.第一开关单元,被配置为在所述第一充电电极组受压时进行导通,以对所述机器人本体进行恒压充电;
33.第二开关单元,被配置为在所述充电信号的电流值递增至处于预设范围时,进行导通,以对所述机器人本体进行恒流充电。
34.本技术实施例的第二方面提供了一种智能充电系统的控制方法,所述智能充电系统包括充电桩和机器人本体,所述控制方法包括:
35.控制所述机器人本体移动至所述充电桩附近的预设位置,则第二充电电极组与第一充电电极组耦接,以使所述第一充电电极组受压,其中,所述第一充电电极组裸露于所述充电桩的外壳,所述第二充电电极组裸露于所述机器人本体的外壳;
36.检测到所述第一充电电极组受压时,控制所述充电桩输出充电信号至所述机器人本体;
37.控制所述机器人本体接收所述充电信号,并将所述充电信号转化为电能并进行存储。
38.优选地,还包括:
39.检测到充电信号的电流值小于预设值时,控制所述充电桩停止输出所述充电信号。
40.优选地,还包括:
41.检测到所述充电桩的第一充电电极组一直受压,控制所述充电桩每隔预设时间进行重新输出所述充电信号。
42.上述一种智能充电系统及其控制方法,该智能充电系统包括充电桩和机器人本体,通过控制机器人本体移动至充电桩附近的预设位置,则第二充电电极组与第一充电电极组耦接,以使第一充电电极组受压,接着检测到第一充电电极组受压时,控制充电桩输出充电信号至机器人本体,最后控制机器人本体接收充电信号,并将充电信号转化为电能并进行存储。由此采用上述控制方法实现了对机器人本体进行智能充电的效果,并且即使机器人本身没有电时,只要人为将机器人本体移动至充电桩附近预设位置,使第二充电电极组与第一充电电极组耦接即可充电,该方式简单便捷,解决了现有的机器人充电技术存在着机器人本身没有电时,无法进行充电,需要借助充电线缆进行连接,导致该方式复杂麻烦的问题。
附图说明
43.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
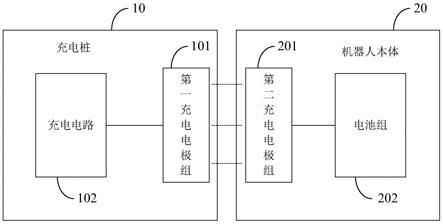
44.图1为本技术一方面提供的一种智能充电系统的结构示意图;
45.图2为对应图1的一种智能充电系统的第一充电电极组和第二充电电极组的模块结构示意图;
46.图3为对应图1的一实施例提供的一种智能充电系统的充电电路的模块结构示意图;
47.图4为对应图1的另一实施例提供的一种智能充电系统的充电电路的模块结构示意图;
48.图5为对应图1的一种智能充电系统的示例电路图。
49.图6为本技术另一方面提供的一种智能充电系统的控制方法的步骤流程示意图。
50.图7为本技术另一方面提供的一种智能充电系统的控制方法的工作原理流程示意图。
具体实施方式
51.为了使本技术的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本技术进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本技术,并不用于限定本技术。
52.请参阅图1,本技术一方面提供的一种智能充电系统的结构,为了便于说明,仅示出了与本实施例相关的部分,详述如下:
53.上述一种智能充电系统,包括充电桩10和机器人本体20,充电桩10被配置为与机
器人本体20进行电性连接时,对机器人本体20进行充电。
54.其中,该充电桩10包括第一充电电极组101和充电电路102。
55.第一充电电极组101裸露于充电桩10的外壳,被配置为受压时,则输出反馈信号。
56.充电电路102与第一充电电极组101连接,被配置为接收到反馈信号时,输出充电信号以通过第一充电电极组101对机器人本体20进行充电。
57.该机器人本体20包括第二充电电极组201和电池组202。
58.第二充电电极组201裸露于机器人本体20的外壳,与第一充电电极组101配对,被配置为与第一充电电极组101进行耦接以使第一充电电极组101受压时,接收充电信号。
59.电池组202与第二充电电极组201连接,被配置为将充电信号转化为电能并进行存储。
60.需要说明的是,由于第一充电电极组101裸露于充电桩10的外壳,第二充电电极组201裸露于机器人本体20的外壳,只要第一充电电极组101与第二充电电极组201直接接触并进行耦接时,则充电桩10即对机器人本体20进行充电,避免了存在伸缩机构经常活动导致容易磨损的情况。
61.同时,即便是机器人本体20没有电时,只要人为的将机器人本体20移动至充电桩10附近的预设位置,即可进行充电,免去了需要采用充电线缆才能实现充电的烦恼,该种充电方式也简单便捷。
62.当然,平时状态机器人本体20的第二充电电极组201与电池组202是开路状态(关闭状态),当机器人本体20与充电桩10电极接通时,自动打开第二充电电极组201与电池组202的回路,达到被动充电效果。
63.如图2所示,在上述的一种智能充电系统中,该第一充电电极组101包括第一正电极1011和第一负电极1012,第二充电电极组201包括第二正电极2011和第二负电极2012。
64.并且,第一正电极1011与第二正电极2011配对,第一负电极1012与第二负电极2012配对。
65.示例性的,第一正电极1011和第一负电极1012可以为独立设置,也可以为集成设置,但两者之间会进行绝缘分离;第二正电极2011和第二负电极2012可以为独立设置,也可以为集成设置,但两者之间会进行绝缘分离。
66.图3示出了对应图1的一实施例提供的一种智能充电系统的充电电路的模块结构,为了便于说明,仅示出了与本实施例相关的部分,详述如下:
67.作为本技术一实施例,上述充电电路102包括充电模块1022、开关模块1021、电极检测模块1024以及主控模块1023。
68.充电模块1022被配置为输出充电信号。
69.开关模块1021与充电模块1022连接,被配置为进行导通或关断,并在导通时,传输所述充电信号。
70.电极检测模块1024与第一充电电极组101连接,被配置为检测到反馈信号时,则判定第一充电电极组101受压,并输出受压信号。
71.主控模块1023,与开关模块1021及电极检测模块1024连接,被配置为接收到受压信号时,控制开关模块1021进行导通,使充电信号传输至机器人本体20,以对机器人本体20进行充电。
72.图4示出了对应图1的另一实施例提供的一种智能充电系统的充电电路的模块结构,为了便于说明,仅示出了与本实施例相关的部分,详述如下:
73.作为本技术另一实施例,在上述图3的基础上,该充电电路102还包括涓流检测模块1025。
74.涓流检测模块1025与第一充电电极组101及主控模块1023连接,被配置为检测到充电信号的电流值小于预设值时,输出断电信号至主控模块1023。
75.主控模块1023还被配置为根据断电信号,控制开关模块1021进行关断,以停止对机器人本体20进行充电。
76.图5示出了对应图1的一种智能充电系统的充电电路的示例电路,为了便于说明,仅示出了与本实施例相关的部分,详述如下:
77.示例性的,上述电极检测模块1024包括第一电极检测单元1031和第二电极检测单元1032。
78.第一电极检测单元1031被配置为检测第一正电极1011是否受压。
79.第二电极检测单元1032被配置为检测第一负电极1012是否受压。
80.具体地,第一电极检测单元1031可与第一正电极1011进行非接触性连接,当第一正电极1011受压时,第一电极检测单元1031的光电开关的光耦输出信号翻转;第二电极检测单元1032可与第一负电极1012进行非接触性连接,当第一负电极1012受压时,第二电极检测单元1032的光电开关的光耦输出信号翻转。并且,只有在第一正电极1011和第一负电极1012均受压时,电极检测模块1024才输出受压信号至主控模块1023。
81.需要说明的是,充电桩10只存在单个电极被按下,另外一个电极没有按下,那么此时充电桩判断为不是真正的机器人本体在充电,而是很有可能小孩子在乱按,此时继电器不会被打开;仅有在两个电极(第一正电极1011和第一负电极1012)在预设时间内同时受压并且保持受压状态(比如1s内同时受压,并且保持1s以上),才会打开继电器,以减少误触发。
82.示例性的,上述机器人本体20还包括保护模块203。
83.保护模块203与第二充电电极组201及电池组202连接,被配置为当充电信号的电流值或电压值超过预设阈值时,断开充电回路。
84.具体地,如图5所示,保护模块203采用保险丝实现,即是当充电信号的电流值或电压值超过预设阈值时,保险丝自动熔断,以起到保护机器人本体20的作用。
85.示例性的,上述开关模块1021包括第一开关单元1034和第二开关单元1033。
86.第一开关单元1034被配置为在第一充电电极组101受压时进行导通,以对机器人本体20进行恒压充电。
87.第二开关单元1033被配置为在充电信号的电流值递增至处于预设范围时,进行导通,以对机器人本体20进行恒流充电。
88.具体地,第一开关单元1034采用小电流继电器实现,第二开关单元1033采用大电流继电器实现,当第一充电电极组101受压时,则小电流继电器进行导通,此时机器人本体20处于恒压充电,充电信号的电流值由零开始递增;接着,当检测到充电信号的电流值递增至处于预设范围时,则控制大电流继电器进行导通,此时机器人本体20处于恒流充电。
89.需要说明的是,上述充电模块1022采用现有的充电器实现;上述主控模块1023采
用单片机实现,当然,单片机的型号不作限定;上述涓流检测模块1025采用现有的检测电路结构实现。
90.由此可得,上述一种智能充电系统的优点体现在:
91.1、实现成本低廉,大部分是硬件电路实现,减少写嵌入式软件,较为容易实现;
92.2、机器人本体万一没电时,只要人为的将机器机器人本体推到充电桩处,按自动充电的位置大概摆好,就能充上电,给用户感受很大的便利,也提升了使用的科技体验感;
93.3、免去充电线缆这个材料成本和人工制造线材的成本;
94.4、免去平时不用充电线,关键时刻又找不到的尴尬。
95.图6示出了本技术另一方面提供的一种智能充电系统的控制方法的步骤流程,为了便于说明,仅示出了与本实施例相关的部分,详述如下:
96.本技术还提供了一种智能充电系统的控制方法,该智能充电系统包括充电桩和机器人本体,该控制方法包括以下步骤:
97.s101.控制机器人本体移动至充电桩附近的预设位置,则第二充电电极组与第一充电电极组耦接,以使第一充电电极组受压,其中,第一充电电极组裸露于充电桩的外壳,第二充电电极组裸露于机器人本体的外壳;
98.s102.检测到第一充电电极组受压时,控制充电桩输出充电信号至机器人本体;
99.s103.控制机器人本体接收充电信号,并将充电信号转化为电能并进行存储。
100.具体地,在步骤s101中,控制机器人本体移动至充电桩附近的预设位置可以是通过远程输出操作指令至机器人本体以使其自动移动至充电桩附近的预设位置,也可以是人为的将机器人本体推动至充电桩附近的预设位置(该方式较为适合在机器人本体没有电时采取),由此免去了需要采用充电线缆进行连接的烦恼,不致于出现难以找到充电线缆以及在光线不足的地方难以找到充电插口的情况。
101.当然,不管是机器人本体的中央处理系统接收到操作指令要去充电,还是人为的将机器人本体推至充电桩附近的预设位置,当充电桩识别到两个电极同时受压后,打开充电桩继电器;电流从电极耦合到机器人本体的电极,机器人本体充电模块的电极端电压提供给555时间电路,555时间电路输出高电平并且维持2s(时间可根据不同情况进行设置),此时机器人本体的继电器被打开,电池组充电并且存储电能。充电桩的涓流充电检测,监测到充电电流小于预设值,也会关闭充电(此时大电流继电器关闭)。
102.并且,机器人本体处于充电桩附近的预设位置时,正电极处弹簧开关受压,输出一个开关量;负电极处弹簧开关受压,也输出一个开关量;单片机同时收到这两个信号后,打开继电器开关为机器人本体充电。当充满电(涓流检测发现电流小于预设值)或者机器人离开(两个电极检测开关量回复常态)。大电流继电器关闭,充电结束。
103.由于第一充电电极组裸露于充电桩的外壳,第二充电电极组裸露于机器人本体的外壳,只要第一充电电极组与第二充电电极组直接接触并进行耦接时,则充电桩即对机器人本体20进行充电,避免了存在伸缩机构经常活动导致容易磨损的情况。
104.作为本技术一实施例,上述控制方法还包括步骤:
105.s104.检测到充电信号的电流值小于预设值时,控制所述充电桩停止输出所述充电信号。
106.作为本技术另一实施例,上述控制方法还包括步骤:
107.s105.检测到充电桩的第一充电电极组一直受压,控制充电桩每隔预设时间进行重新输出充电信号。
108.具体地,如果机器人本体充满电后没有离开充电桩,充电桩的单片机收到第一充电电极组长时间受压没有释放过,那么充电桩将会间隔一定时间重新为机器人本体进行充电,从而弥补机器人本体长时间无人搭理,等要用机器人时机器人本体又不是满电的情况影响工作效率。例如:春节放长假后回来上班,机器人电量不足无法保证当天满勤的情况。另外,此间隔充电时间和次数可以根据不同需要进行设置,以达到适应不同环境的情况,同时也减少机器人本体的电池组处于长时间充电导致过充情况。
109.图7示出了本技术另一方面提供的一种智能充电系统的控制方法的工作原理流程,为了便于说明,仅示出了与本实施例相关的部分,详述如下:
110.上述一种智能充电系统的充电过程具体为:
111.首先,当充电桩的两个电极(第一正电极和第一负电极)同时受压时,控制小电流继电器打开;
112.同时,监控充电电流值,若充电电流值处于预设范围内,则判断为正常充电,继而打开大继电器;若充电电流值大于预设值,则判断为输出异常,比如充电桩的接触点是被金属短路或者机器人本体的充电回路形成短路,以起到保护充电桩的作用;
113.待机器人充满电时,控制充电桩停止输出充电信号;
114.当检测到充电桩的两个电极一直受压,则判定机器人本体充满电后并没有离开预设位置,此时控制充电桩间隔n分钟后打开一次充电过程,以弥补电池自耗电,保持满电;
115.最后直至机器人本体离开预设位置,充电完成。
116.综上所述,本技术实施例中的一种智能充电系统及其控制方法,该智能充电系统包括充电桩和机器人本体,通过控制机器人本体移动至充电桩附近的预设位置,则第二充电电极组与第一充电电极组耦接,以使第一充电电极组受压,接着检测到第一充电电极组受压时,控制充电桩输出充电信号至机器人本体,最后控制机器人本体接收充电信号,并将充电信号转化为电能并进行存储。由此采用上述控制方法实现了对机器人本体进行智能充电的效果,并且即使机器人本身没有电时,只要人为将机器人本体移动至充电桩附近预设位置,使第二充电电极组与第一充电电极组耦接即可充电,该方式简单便捷;同时,第一充电电极组裸露于充电桩的外壳,第二充电电极组裸露于机器人本体的外壳,避免了存在伸缩机构经常活动导致容易磨损的情况,解决了现有的机器人充电技术存在着机器人本身没有电时,无法进行充电,需要借助充电线缆进行连接,导致该方式复杂麻烦的问题。
117.在本文对各种器件、电路、装置、系统和/或方法描述了各种实施方式。阐述了很多特定的细节以提供对如在说明书中描述的和在附图中示出的实施方式的总结构、功能、制造和使用的彻底理解。然而本领域中的技术人员将理解,实施方式可在没有这样的特定细节的情况下被实施。在其它实例中,详细描述了公知的操作、部件和元件,以免使在说明书中的实施方式难以理解。本领域中的技术人员将理解,在本文和所示的实施方式是非限制性例子,且因此可认识到,在本文公开的特定的结构和功能细节可以是代表性的且并不一定限制实施方式的范围。
118.在整个说明书中对“各种实施方式”、“在实施方式中”、“一个实施方式”或“实施方式”等的引用意为关于实施方式所述的特定特征、结构或特性被包括在至少一个实施方式
中。因此,短语“在各种实施方式中”、“在一些实施方式中”、“在一个实施方式中”或“在实施方式中”等在整个说明书中的适当地方的出现并不一定都指同一实施方式。此外,特定特征、结构或特性可以在一个或多个实施方式中以任何适当的方式组合。因此,关于一个实施方式示出或描述的特定特征、结构或特性可全部或部分地与一个或多个其它实施方式的特征、结构或特性进行组合,而没有假定这样的组合不是不合逻辑的或无功能的限制。任何方向参考(例如,加上、减去、上部、下部、向上、向下、左边、右边、向左、向右、顶部、底部、在
…
之上、在
…
之下、垂直、水平、顺时针和逆时针)用于识别目的以帮助读者理解本公开内容,且并不产生限制,特别是关于实施方式的位置、定向或使用。
119.虽然上面以某个详细程度描述了某些实施方式,但是本领域中的技术人员可对所公开的实施方式做出很多变更而不偏离本公开的范围。连接参考(例如,附接、耦合、连接等)应被广泛地解释,并可包括在元件的连接之间的中间构件和在元件之间的相对运动。因此,连接参考并不一定暗示两个元件直接连接/耦合且彼此处于固定关系中。“例如”在整个说明书中的使用应被广泛地解释并用于提供本公开的实施方式的非限制性例子,且本公开不限于这样的例子。意图是包含在上述描述中或在附图中示出的所有事务应被解释为仅仅是例证性的而不是限制性的。可做出在细节或结构上的变化而不偏离本公开。
120.以上仅为本技术的较佳实施例而已,并不用以限制本技术,凡在本技术的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1