一种电机控制方法,及相应的投影结构,车灯和车辆与流程
1.本发明涉及投影技术领域,具体地涉及一种电机控制方法,投影结构及相应的车灯和车辆。
背景技术:
2.采用步进式电机来实现投影控制时,电机需要周期性的转动和停止,由于惯性,电机在接受到停止信号后会来回震荡,需要经过一定的延迟时间才会真正停止在目标位置上。参考图2和图3。对于如图 2所示的电流波形,其对应图3所示的旋转示意图。当电流输出一个完整的正弦波时,电机转子从起始位置s转到目标位置d,随后电流变为恒定的平波,此时由于惯性,转子在目标位置d的附近来回摆动,需要一段时间后真正稳定在目标位置d。因此需要较长的延迟时间。这延长了周期时间,同时也导致投影效果不够理想。
技术实现要素:
3.有鉴于此,本发明的一个实施例解决的问题之一是减少电机停止时的延迟。
4.根据本发明的一个方面,提供了一种用于控制电机运动的方法,其中,所述电机具有一控制部,所述方法包括以下步骤:
5.控制部基于电流脉冲周期,向所述电机输出的电流,以控制所述电机的转动;
6.其中,所述电流脉冲周期包括运动期,过渡期和间隔期,所述运动起经过所述过渡期后进入所述间隔期。
7.通过采用过渡期,减少由于直接进入间隔期停止电机运动,而产生的因为惯性而导致的延时。
8.根据本发明所述的方法,其中,所述方法还包括以下步骤:
9.在所述运动期内,输出变化电流,以控制所述电机持续转动;
10.在所述过渡期和所述间隔期内,持续输出稳定电流,以停止输出扭矩。
11.在过渡期间输出稳定电流,以使得电机在过渡期间即开始停止旋转,减少后期的延迟时间。
12.根据本发明所述的方法,其中,所述电机为步进式电机,所述方法还包括一下步骤:
[0013]-所述电机的磁极在到达过渡期时停止转动,而电机转子在所述过渡期内仍继续转动至目标位置后停止。
[0014]
根据本发明所述的方法,其中,所述方法还包括一下步骤:
[0015]-所述磁极在转子到达目标位置后,从过渡期所处位置转换到所述目标位置。
[0016]
当磁极转至目标位置后,即可将转子稳定于该位置而不再来回转动。亦即可保持静止,而不会由于惯性产生震荡。
[0017]
根据本发明所述的方法,其中,所述电流脉冲周期与所述电流的变化频率相关。
[0018]
根据本发明所述的方法,其中,所述过渡期时长与所述所述电流脉冲周期,以及所
述电机的负载相关。
[0019]
根据本发明所述的方法,其中,所述控制部还用于控制一光源,所述方法还包括以下步骤:
[0020]
所述控制部控制所述电机和所述光源,使得所述光源在所述电机的间隔期被点亮,而在所述电机的运动期和过渡期熄灭。
[0021]
根据本方案,能够保证在光源点亮期间电机不会转动,从而不会影响光源照亮的效果。
[0022]
根据本发明所述的方法,其中,所述方法还包括以下步骤:
[0023]
所述控制部接受到触发信号后,基于所述电流脉冲周期,向所述电机输出的电流,以控制所述电机的转动。
[0024]
根据本发明所述的方法,其中,过渡期对应的时长和/或电机转角可基于测量获得。
[0025]
根据本发明的另一个实施例,还提供一种投影机构,其中,所述投影机构包括电机、控制部、光源,其中,所述投影机构采用所述方法来控制所述投影机构中的电机。
[0026]
根据本发明的另一个方面,还提供一种车灯,所述车灯包括所述投影结构。
[0027]
根据本发明的又一个方面,还提供一种车辆,所述车辆包括所述车灯。
[0028]
与现有技术相比,本发明具有以下优点:通过采用过渡期,在到达目标位置之前即不再给电机提供动力,利用惯性使得电机直接停止于目标位置上,减少了由于电机过冲导致的延迟,并且由于避免了投影电机转动过程造成的模糊影像,因而提高了投影质量。
附图说明
[0029]
通过阅读参照以下附图所作的对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
[0030]
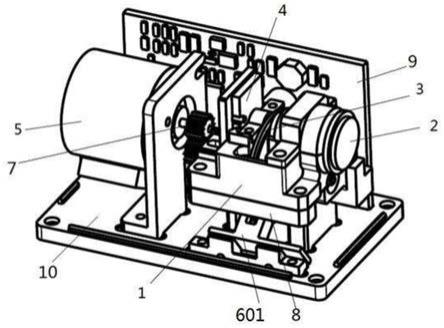
图1示意出了根据本发明的一个实施例的一种投影结构的立体结构示意图;
[0031]
图2示意出了根据现有技术的一种电机的控制电路脉冲波形示意图;
[0032]
图3示意出了根据现有技术的一种电机旋转位置的示意图;
[0033]
图4示意出了根据本发明的一个实施例的电机的双相电流的电流脉冲波形示意图;
[0034]
图5示意出了根据本发明的一个实施例的一种电机旋转位置的示意图;
[0035]
图6示意出了根据本发明的一个实施例的电机的三相电流的电流脉冲波形示意图;
[0036]
图7示意出了根据本发明的一个实施例的控制方法步骤示意图。
[0037]
附图标记列表:
[0038]
1第一支架2透镜组3胶片部4光源5电机6控制部7传动部8第二支架9pcb板10支撑板
具体实施方式
[0039]
下面将参照附图更详细地描述本发明的优选实施方式。虽然附图中显示了本发明的优选实施方式,然而应该理解,可以以各种形式实现本发明而不应被这里阐述的实施方式所限制。相反,提供这些实施方式是为了使本发明更加透彻和完整,并且能够将本发明的范围完整的传达给本领域的技术人员。
[0040]
根据本发明的实施例公开了一种投影结构和用于投影的方法,以及具有该投影结构的车灯以及采用该车灯的车辆。
[0041]
其中,参考图1。图1示意出了根据本发明的一个实施例的投影结构的立体示意图。
[0042]
根据图1所示的实施例的投影结构,包括光源4、电机5以及控制部6。优选地,投影结构还包括第一支架1,透镜组2,胶片部3 以及第二支架8。
[0043]
其中,光源4、胶片部3和所述透镜组2三者形成投影光路。胶片部3由电机5带动转动;所述透镜组2包括至少一个透镜,且所述至少一个透镜被容纳于所述第一支架1中,所述控制部6用于控制所述电机5和/或所述光源4。
[0044]
其中,控制部6通常可采用微控制单元(mcu,micro controllerunit)来实现。并且,其与用于接收输入的部分,诸如传感器601等,可相距一段物理距离。
[0045]
在根据本发明的一个实施例中,所述方法包括步骤s1。
[0046]
在步骤s1中,控制部6基于电流脉冲周期,向所述电机5输出的电流,以控制所述电机5的转动。
[0047]
参考图4和图5,根据本发明的一个实施例的方案,采用如图4 所示的波形。其中,所述电流脉冲周期包括运动期图t1,过渡期ta 和间隔期t2,所述运动期t1经过所述过渡期ta后进入所述间隔期t2。
[0048]
图6示意出了根据本方案的一种三相电流的电流脉冲周期示意图。其中,本领域技术人员应可理解,不同规格的步进式电机可采用诸如双相电流、三相电流等不同的参数。只要其所采用的脉冲电流的波形如本方案中所述的包括运动期、过渡期以及间隔期,即可认为其电机的工作方式与本方案相同或相似。
[0049]
具体地,参考图7,所述步骤s1进一步包括步骤s11和步骤s12。
[0050]
在步骤s11中,控制部6在所述运动期内,输出正弦波变化电流,电机5的转子从起始位置s开始转动,接着,在步骤s12中,在到达过渡期ta,亦即图5中a位置时,控制部6开始输出恒定的电流,此时电机转子借助惯性继续旋转到达目标位置d,并在此位置静止。随后在间隔周期t1开始时保持静止直至下一个正弦波到来。
[0051]
随后,在下一周期中,以当前的目标为d作为新的起始位置,仍然重复步骤s11和步骤s12的顺序,来输出电流,进而控制电机5。
[0052]
本领域技术人员应可理解,当控制部6控制输出恒定电流时,电机5的转子动力消失,仅利用惯性继续向前运动。
[0053]
根据本发明的一个优选实施例,其中,所述方法还包括步骤s13。
[0054]
在步骤s13中,电机5的相位角在过渡期内停止运动,而电机5 的转子在所述过渡期内仍继续转动至目标位置后停止。其中,所述电机的相位角为转子磁极与主磁极的夹角。
[0055]
具体地,当控制器6根据电流脉冲周期,开始输出与过渡期ta相对应的恒定电流,此时,电机5的相位角停止变化。,不再输出扭矩。同时,电机5的转子由于惯性继续向前运
动,并在目标位置停止。
[0056]
亦即,参考图4和图5,过渡期开始时电机5的转子位于a点,在过渡期期间,相位角从a点开始停止变化,而转子利用惯性继续向前运动,并到达目标位置d点。
[0057]
更优选地,根据本实施例的优选方案,所述方法在步骤s13之后还包括步骤s14。
[0058]
在步骤s14中,在电机5的转子到达目标位置后,所述电机5的相位角从过渡期的过渡相位角转换到与所述目标位置对应的目标相位角。
[0059]
亦即,参考图4和图5,在转子到达目标位置d后,原本在过渡期停止变化的相位角在过渡期ta结束阶段迅速转动,到达与该目标位置d 对应的目标相位角。亦即对应过渡期ta段在结束点迅速回归到中轴线的电流脉冲部分。
[0060]
优选地,该目标相位角与与电机在起始位置s时的相位角相同。
[0061]
其中,所述电流脉冲周期与所述电流的变化频率相关。亦即,通过改变输出电流的变化频率,可控制电机5对应的电流脉冲周期的长短。
[0062]
优选地,根据本发明的又一实施例,所述控制部6还用于控制一光源4,根据本实施例的方法还包括步骤s2。
[0063]
在步骤s2中,所述控制部6控制所述电机5和所述光源4,使得所述光源4在所述电机5的间隔期被点亮,而在所述电机5的运动期和过渡期熄灭。
[0064]
具体地,结合图1所示的投影结构,控制部6在运动期t1控制电机 5转动,以带动胶片部3转动,此时光源4关闭;随后在过渡期ta期间,控制部6控制输出恒定电流,电机5动力消失,借助惯性继续运动,并在到达磁极对应的目标位置时停止,此时光源4仍然关闭;光源4在运动期t1和过渡期ta期间关闭,对外不投影电机4带动胶片部3转动的转动过程。随后,在间隔期t2阶段,控制部6仍然输出恒定电流,电机 5因没有动力继续在目标位置保持静止,光源4打开,点亮位于投影通道中的胶片部的胶片,以对外投影该胶片影像。
[0065]
优选地,根据本发明的又一个实施例,所述方法还包括步骤s3。
[0066]
在步骤s3中,所述控制部6接受到触发信号后,基于所述电流脉冲周期,向所述电机5输出的电流,以控制所述电机5的转动。
[0067]
其中,所述触发信号包括控制部6可接收的各类信息。
[0068]
优选地,控制部6通过诸如传感器等检测装置来获取输入信息。
[0069]
优选地,控制部6获得的输入信息包括但不限于以下至少任一项:
[0070]
1)胶片定位信息;例如,胶片的起始位置信息;又例如,各个胶片的位置信息等;
[0071]
2)车速信息;例如,当前车速的具体时速信息;又例如,车速快慢等级信息等;
[0072]
3)车辆操作信息,例如,踩下刹车的操作,开车门的操作等等。
[0073]
优选地,控制部6根据输入信息,来确定触发投影结构的启动或终止;或者,控制部6根据输入信息,来控制投影结构的运行时间和运行间隔等。
[0074]
根据本发明所述的方法,其中,所述过渡期时长与所述所述电流脉冲周期,以及所述电机的负载相关。并且,过渡期对应的时长和/或电机转角可基于测量获得。
[0075]
根据本实施例的一个优选方案,投影结构可具有红外传感器601。其中,所述红外传感器601用于探测所述胶片部3上的一个或多个特定位置。在一种示例中,红外传感器的前部可以具有凸出的两臂,当飞轮在其两臂之间转动时,能够检测到飞轮上的特定结构,例如,飞轮表面的凹陷、突起等结构。
[0076]
在电机5上负载胶片,并根据红外传感器601的传感信息获得与电机实际位置对应的脉冲信息。通过采用多个过渡期时长进行调校,来最终确定合适的过渡期时长ta(或者,过渡期对应的电机转角θa),并最终确定相似负载情况下,控制部6所采用的、与电流脉冲周期相对应的,控制电流的电流脉冲波形。
[0077]
与现有技术相比,本发明具有以下优点:通过采用过渡期,在到达目标位置之前即不再给电机提供动力,利用惯性使得电机直接停止于目标位置上,减少了由于电机过冲导致的延迟,并且由于避免了投影电机转动过程造成的模糊影像,因而提高了投影质量。
[0078]
本领域技术人员可以理解,可以采用多种形式的传感器来检测飞轮的位置,而不限于红外传感器。例如,可采用磁力传感器,并在飞轮上设置相应的磁力结构,基于飞轮转动时产生磁力的不同,来确定其位置等等。本领域技术人员可根据实际情况与需求来确定所采用的传感器,此次不再赘述。
[0079]
对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化涵括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。此外,显然“包括”一词不排除其他单元或步骤,单数不排除复数。系统权利要求中陈述的多个单元或装置也可以由一个单元或装置通过软件或者硬件来实现。第一,第二等词语用来表示名称,而并不表示任何特定的顺序。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1