一种变电站视频与机器人联合巡检系统及方法与流程
[0001]
本发明涉及变电站联合巡检技术领域,更具体地,涉及一种变电站视频与机器人联合巡检系统及方法。
背景技术:
[0002]
变电/换流站在运行过程中,电力系统运行检修人员需要对站内的设备、仪器仪表和线路等进行巡检。目前,在全国500多个变电/换流站已经实现了利用巡检机器人和视频摄像头对上述设施的巡检,随着站内的视频监控设备增加,也给站内运维人员带来操作控制的麻烦,实现多场景、多视角的视频设备联动,是实现变电站全景多参量的智能运维的重要手段。但目前存在以下问题:
[0003]
1)机器人和视频摄像头的拍摄视角受限
[0004]
拍摄视角受限:变电站巡检机器人的主要拍摄视角是从地面高度向上仰视拍摄变电站设备;变电站视频摄像头的主要拍摄视角是从变电站构架高处向下俯视拍摄变电设备;
[0005]
2)变电站巡检机器人和视频摄像头的控制是独立的两套系统
[0006]
目前,变电站巡检机器人的控制是在变电站机器人主机上实现的,视频摄像头的控制是在变电站视频主机上实现的,机器人主机和视频主机通常只将结果汇总到变电信息综合处理系统展示,变电信息综合处理系统不能直接对机器人主机和视频主机进行控制。因此,变电站运维人员必须对机器人主机和视频主机进行单独控制,对于突发情况时,控制和管理复杂,容易误操作,耽误最佳时机。
技术实现要素:
[0007]
本发明技术方案提供一种变电站视频与机器人联合巡检系统及方法,以解决如何对变电站视频与机器人进行联合巡检的问题。
[0008]
为了解决上述问题,本发明提供了一种变电站视频与机器人联合巡检系统,所述系统包括:变电站联合巡检主机、变电站机器人主机、变电站视频主机、变电站巡检机器人以及视频摄像头;
[0009]
所述变电站联合巡检主机用于接收联动信号,根据所述联动信号和巡视点的对应关系,生成联动巡检任务指令,并将所述联动巡检任务指令发送至变电站机器人主机和变电站视频主机;通过所述变电站联合巡检主机根据所述第一采集数据和所述第二采集数据确定巡视点的巡检结果;
[0010]
所述变电站视频主机根据接收到的所述联动巡检任务指令控制所述视频摄像头,接收所述视频摄像头反馈的第一采集数据,并将所述第一采集数据发送至所述变电站联合巡检主机;
[0011]
所述变电站机器人主机根据接收到的所述联动巡检任务指令控制所述变电站巡检机器人,接收所述变电站巡检机器人反馈的第二采集数据,并将所述第二采集数据发送
至所述变电站联合巡检主机。
[0012]
优选地,所述视频摄像头包括:枪型摄像机、球型摄像机、半球型摄像机、筒型摄像机、热成像摄像机。
[0013]
优选地,所述变电站视频主机符合q/gdw 1517.1标准规定,符合国网视频接口b协议传输所述第一采集数据。
[0014]
优选地,所述变电站巡检机器人包括:轮式巡检机器人、履带巡检机器人、轨道巡检机器人、爬行机器人。
[0015]
优选地,所述变电站机器人主机基于tcp传输协议发送所述变电站巡检机器人的控制指令,符合国网视频接口b协议传输所述第二采集数据。
[0016]
优选地,所述第一采集数据包括可见光和红外图像。
[0017]
优选地,所述第二采集数据可见光和红外图像、所述变电站巡检机器人的运行状态、告警信息。
[0018]
基于本发明的另一方面,本发明提供一种变电站视频与机器人联合巡检方法,所述方法包括:
[0019]
通过变电站联合巡检主机用于接收联动信号,根据所述联动信号和巡视点的对应关系,生成联动巡检任务指令,并将所述联动巡检任务指令发送至变电站机器人主机和变电站视频主机;
[0020]
所述变电站视频主机根据接收到的所述联动巡检任务指令控制视频摄像头,接收所述视频摄像头反馈的第一采集数据,并将所述第一采集数据发送至所述变电站联合巡检主机;
[0021]
所述变电站机器人主机根据接收到的所述联动巡检任务指令控制变电站巡检机器人,接收所述变电站巡检机器人反馈的第二采集数据,并将所述第二采集数据发送至所述变电站联合巡检主机;
[0022]
通过所述变电站联合巡检主机根据所述第一采集数据和所述第二采集数据确定巡视点的巡检结果;
[0023]
优选地,所述视频摄像头包括:枪型摄像机、球型摄像机、半球型摄像机、筒型摄像机、热成像摄像机。
[0024]
优选地,所述变电站巡检机器人包括:轮式巡检机器人、履带巡检机器人、轨道巡检机器人、爬行机器人。
[0025]
本发明技术方案提供一种变电站视频与机器人联合巡检系统及方法,其中系统包括:变电站联合巡检主机、变电站机器人主机、变电站视频主机、变电站巡检机器人以及视频摄像头;变电站联合巡检主机用于接收联动信号,根据联动信号和巡视点的对应关系,生成联动巡检任务指令,并将联动巡检任务指令发送至变电站机器人主机和变电站视频主机;通过变电站联合巡检主机根据第一采集数据和第二采集数据确定巡视点的巡检结果;变电站视频主机根据接收到的联动巡检任务指令控制视频摄像头,接收视频摄像头反馈的第一采集数据,并将第一采集数据发送至变电站联合巡检主机;变电站机器人主机根据接收到的联动巡检任务指令控制变电站巡检机器人,接收变电站巡检机器人反馈的第二采集数据,并将第二采集数据发送至变电站联合巡检主机。本发明技术方案提供了一种变电站视频与机器人联合巡检系统,通过变电站巡检主机联动变电站机器人主机和变电站视频主
机,提供变电站多场景多视角的解决方案。
附图说明
[0026]
通过参考下面的附图,可以更为完整地理解本发明的示例性实施方式:
[0027]
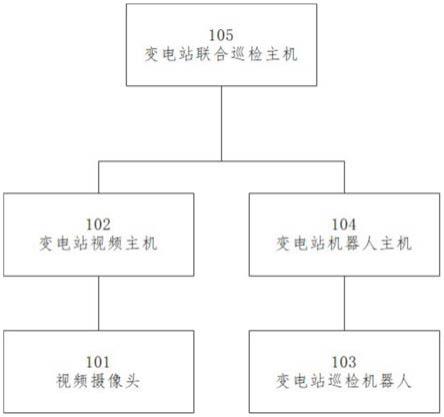
图1为根据本发明优选实施方式的一种变电站视频与机器人联合巡检系统结构图;
[0028]
图2为根据本发明优选实施方式的一种变电站视频与机器人联合巡检系统框架结构图;以及
[0029]
图3为根据本发明优选实施方式的一种变电站视频与机器人联合巡检方法流程图。
具体实施方式
[0030]
现在参考附图介绍本发明的示例性实施方式,然而,本发明可以用许多不同的形式来实施,并且不局限于此处描述的实施例,提供这些实施例是为了详尽地且完全地公开本发明,并且向所属技术领域的技术人员充分传达本发明的范围。对于表示在附图中的示例性实施方式中的术语并不是对本发明的限定。在附图中,相同的单元/元件使用相同的附图标记。
[0031]
除非另有说明,此处使用的术语(包括科技术语)对所属技术领域的技术人员具有通常的理解含义。另外,可以理解的是,以通常使用的词典限定的术语,应当被理解为与其相关领域的语境具有一致的含义,而不应该被理解为理想化的或过于正式的意义。
[0032]
图1为根据本发明优选实施方式的一种变电站视频与机器人联合巡检系统结构图。本发明实施方式提供了一种变电站视频与机器人联合巡检系统,通过变电站巡检主机联动变电站机器人主机和变电站视频主机,提供变电站多场景多视角的解决方案。
[0033]
本发明提供了一种激光点云与多光谱融合的缺陷判别系统,一种基于搭载多线激光雷达、多光谱摄像头和惯性测量模块的变电站/换流站巡检机器人巡检系统,属于电力设备监测技术领域。系统针对变电站/换流站设备巡视预置点位设置不合理的问题,提出多线激光雷达、多光谱摄像头、惯性测量模块的融合,实现整站激光点云的采集与比对,激光点云与多光谱的融合分析,减少变电站设备缺陷漏检和误检。系统针对变电站/换流站设备巡视智能化水平和数据利用率低的问题,提出数据可扩展的激光点云变电站巡检缺陷判别系统,激光点云提供空间位置信息,可以将多光谱数声纹成像等数据叠加到点云中,形成基于空间的多维数据诊断,提升缺陷诊断和故障定位能力。
[0034]
如图1所示,本发明提供一种变电站视频与机器人联合巡检系统,系统包括:变电站联合巡检主机105、变电站机器人主机104、变电站视频主机102、变电站巡检机器人103以及视频摄像头101;
[0035]
变电站联合巡检主机105用于接收联动信号,根据联动信号和巡视点的对应关系,生成联动巡检任务指令,并将联动巡检任务指令发送至变电站机器人主机104和变电站视频主机102;通过变电站联合巡检主机105根据第一采集数据和第二采集数据确定巡视点的巡检结果;
[0036]
变电站视频主机102根据接收到的联动巡检任务指令控制视频摄像头101,接收视
频摄像头101反馈的第一采集数据,并将第一采集数据发送至变电站联合巡检主机105;优选地,变电站视频主机102符合q/gdw 1517.1标准规定,符合国网视频接口b协议传输第一采集数据。优选地,视频摄像头101包括:枪型摄像机、球型摄像机、半球型摄像机、筒型摄像机、热成像摄像机。优选地,第一采集数据包括可见光和红外图像。
[0037]
本发明通过视频摄像头101采集变电设备可见光图像或红外图像;变电站视频主机102,用于控制视频摄像头101、存储和分析视频摄像头101回传的视频和图像等。本发明的视频摄像头101为市场主流摄像头,包括但不限于:枪型摄像机、球型摄像机、半球型摄像机、筒型摄像机、热成像摄像机。本发明变电站视频主机102应符合q/gdw 1517.1标准规定,遵循国网视频接口b协议传输视频等信息。
[0038]
变电站机器人主机104根据接收到的联动巡检任务指令控制变电站巡检机器人103,接收变电站巡检机器人103反馈的第二采集数据,并将第二采集数据发送至变电站联合巡检主机105。优选地,变电站机器人主机104基于tcp传输协议发送变电站巡检机器人103的控制指令,符合国网视频接口b协议传输第二采集数据。优选地,变电站巡检机器人103包括:轮式巡检机器人、履带巡检机器人、轨道巡检机器人、爬行机器人。优选地,第二采集数据可见光和红外图像、变电站巡检机器人103的运行状态、告警信息。
[0039]
本发明变电站巡检机器人103,用于变电站无人巡视,可搭载可见光摄像头和红外摄像头,用于采集变电站可见光和红外图像变电站机器人主机104,用于控制巡检机器人、存储机器人回传的可见光和红外图像、机器人运行状态、告警信息等;
[0040]
本发明变电站巡检机器人103为市场主流巡检机器人,包括但不限于:轮式巡检机器人、履带巡检机器人、轨道巡检机器人、爬行机器人。本发明的变电站机器人主机104应遵循tcp传输协议,实现控制、巡视任务等指令下发,接收巡视数据、机器人状态等数据;应遵循接口b协议传输视频;应遵循ftps等安全文件传输规范,接收可见光照片、红外图谱等文件。
[0041]
本发明变电站联合巡检主机105,用于分析巡检结果,在变电站巡检主机接到联动信号后,根据配置的联动信号和巡视点位的对应关系,自动生成巡视任务,由机器人或高清视频对需要复核的点位进行巡视,替代人工巡视复核。
[0042]
本发明变电站联合巡检主机105与主辅助设备监控主机通过安全-区与安全-区之间正向隔离装置通信,采用udp协议;与变电站机器人主机104之间的机器人控制、任务下发、查询信息等指令应遵循tcp传输协议;与变电站视频主机102之间的视频传输及控制协议应遵循接口b协议。变电站巡检主机具备双网口和设置独立网段。
[0043]
本发明提供的变电站视频与机器人联合巡检系统是一种自动的巡检系统,变电站联合巡检主机105,用于分析巡检结果,在变电站巡检主机接到联动信号后,根据配置的联动信号和巡视点位的对应关系,自动生成巡视任务对需要复核的点位进行立即巡视,替代人工巡视复核,提高巡检质量,降低运维成本,提升巡检效率。
[0044]
本发明的变电站视频与机器人联合巡检系统是一种安全的巡检系统,变电站联合巡检主机105与主辅助设备监控主机通过安全-区与安全-区之间正向隔离装置通信,采用udp协议,确保安全-区与安全-区之间信息安全;变电站联合巡检主机105与变电站机器人主机104之间遵循tcp传输协议;变电站联合巡检主机105与变电站视频主机102之间遵循接口b协议。
[0045]
图2为根据本发明系统的框架结构图。如图2所示,变电站联合巡检主机部署在特高压交流变电站安全-区,下发控制、巡视任务等指令,控制机器人和摄像机开展室内外设备联合巡视作业,接收巡视数据、采集文件,对采集的数据进行智能分析,形成巡视结果和巡视报告,及时发送告警。同时具备实时监控、与主辅监控系统智能联动等功能。
[0046]
本发明涉及的系统支持主设备遥控预置信号、主辅设备变位信号、主辅设备监控系统越限信号和主辅设备监控系统告警信号的联动功能,支持主辅监控系统向变电站巡检主机和变电站巡检主机向主辅监控系统发送联动信号功能;
[0047]
变电站巡检主机接到联动信号后,支持根据配置的联动信号和巡视点位的对应关系,自动生成巡视任务,由机器人或视频对需要复核的点位进行巡视;
[0048]
支持实时监控画面辅助人工开展核查工作,支持联动信号的实时监控画面链接快捷跳转功能,联动过程中保持一组画面全景展示联动设备状况;
[0049]
支持机器人或视频完成复核点位巡视后,可在变电站巡检主机查看复核结果;
[0050]
主辅设备监控系统联动信号类型包括但不限于:
[0051][0052][0053]
辅助设备站端监控系统接收主设备监控系统联动信息,消息建议采用的udp协议,报文格式应按照cim/e语言格式规范。主辅设备联动信息统一通过辅助设备监控主机传送给变电站巡检主机;
[0054]
其中,触发式联动包括遥控、遥信、遥测数据,联动信号触发发送策略如下:
[0055]
1)遥控操作联动信号
[0056]
遥控包括普通遥控和顺控遥控操作,在监控主机向测控装置下发遥控选择指令前(辅助系统为直控设备的模式,在遥控指令前)应自动向变电站巡检主机同时发送联动信号,变电站巡检主机接收到联动信息后触发视频摄像头联动动作。
[0057]
2)非遥控联动信号
[0058]
其它非遥控联动信号均为装置上送遥信遥测或告警信号,在监控主机接收到该实时告警信号后应自动向变电站巡检主机同时发送联动信号,变电站巡检主机接收到联动信息后触发视频设备联动动作。
[0059]
触发联动信号每次发送一个设备变化信息数据,数据格式包括“站序号、监控id、类型、属性、值描述、事件时标”,变电站巡检主机接收到联动数据后由唯一的监控id查找对应联动摄像头关联配置及设备描述信息,用于联动控制和设备信息展示。
[0060]
数据内容格式如示例1:
[0061]
示例:触发联动信息数据格式示例
[0062]
//站序号监控id类型(0遥控,1遥信,2遥测)属性值描述事件时标
[0063]
1 1039 0动作控合2017-12-01 08:18:55.356
[0064]
1 1040 1变位合位2017-12-01 09:18:25.356
[0065]
1 5890 1跳闸分位2017-12-01 09:28:53.376
[0066]
1 5898 2越限越限2017-12-01 09:28:58.376
[0067]
辅助设备监控主机与变电站巡检主机通过安全-区与安全-区之间正向隔离装置通信,采用100m或更高速率工业以太网rj45接口通讯。变电站巡检主机接收辅助设备监控主机的联动信息,消息建议采用的udp协议。
[0068]
图3为根据本发明优选实施方式的一种变电站视频与机器人联合巡检方法流程图。如图3所示,本发明提供一种变电站视频与机器人联合巡检方法,方法包括:
[0069]
步骤101:通过变电站联合巡检主机用于接收联动信号,根据联动信号和巡视点的对应关系,生成联动巡检任务指令,并将联动巡检任务指令发送至变电站机器人主机和变电站视频主机;
[0070]
步骤102:变电站视频主机根据接收到的联动巡检任务指令控制视频摄像头,接收视频摄像头反馈的第一采集数据,并将第一采集数据发送至变电站联合巡检主机;优选地,视频摄像头包括:枪型摄像机、球型摄像机、半球型摄像机、筒型摄像机、热成像摄像机。优选地,变电站视频主机符合q/gdw 1517.1标准规定,符合国网视频接口b协议传输第一采集数据。优选地,第一采集数据包括可见光和红外图像。
[0071]
步骤103:变电站机器人主机根据接收到的联动巡检任务指令控制变电站巡检机器人,接收变电站巡检机器人反馈的第二采集数据,并将第二采集数据发送至变电站联合巡检主机;优选地,变电站巡检机器人包括:轮式巡检机器人、履带巡检机器人、轨道巡检机器人、爬行机器人。优选地,变电站机器人主机基于tcp传输协议发送变电站巡检机器人的控制指令,符合国网视频接口b协议传输第二采集数据。优选地,第二采集数据可见光和红外图像、变电站巡检机器人的运行状态、告警信息。
[0072]
步骤104:通过变电站联合巡检主机根据第一采集数据和第二采集数据确定巡视点的巡检结果。
[0073]
本发明优选实施方式的一种变电站视频与机器人联合巡检方法300与本发明优选实施方式的一种变电站视频与机器人联合巡检系统100相对应,在此不再进行赘述。
[0074]
已经通过参考少量实施方式描述了本发明。然而,本领域技术人员所公知的,正如附带的专利权利要求所限定的,除了本发明以上公开的其他的实施例等同地落在本发明的范围内。
[0075]
通常地,在权利要求中使用的所有术语都根据他们在技术领域的通常含义被解释,除非在其中被另外明确地定义。所有的参考“一个//该[装置、组件等]”都被开放地解释为装置、组件等中的至少一个实例,除非另外明确地说明。这里公开的任何方法的步骤都没必要以公开的准确的顺序运行,除非明确地说明。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1