磁致动器和机电系统的制作方法
[0001]
本发明涉及一种磁致动器。
背景技术:
[0002]
在光学设备中,磁性瞄准机构使用磁致动器平移运动部件。运动部件连接到光学系统的接口部件,特别是镜子。使用四个独立的磁致动器的光学磁性瞄准机构是已知的。磁致动器产生运动部件的平移。磁致动器可以联接在一起,例如是推拉型的,以产生运动部件的旋转。运动部件通过柔性引导件连接到固定部分。这些机构中使用的磁致动器属于两个主要家族:动磁体致动器和动铁致动器。
[0003]
研究工作介绍公开了不具有四个独立致动器而是单个定子组件和移动组件的机构。这样的教导可以在yongjun long等人的出版物"modeling and analysis of a novel two-axis rotary electromagnetic actuator for fast steering mirror"journal of magnetics 19(2),130-139(2014)中以及在yongjun long等人的出版物"design of a moving-magnet electromagnetic actuator for fast steering mirror through finite element simulation method"journal of magnetics 19(3),300-308(2014)中找到。
[0004]
然而,很明显,这些机构利用在运动组件和固定磁路的两个部分之间设置的空气间隙来提供有限的运动。另外,通过增加或减小空气间隙的厚度通过正常的磁阻变化获得磁力。由于这个原因,运动组件承受的磁力可能会导致运动组件在固定部件上“粘住”或撞击,这不利于引导整个系统。
[0005]
为了降低这种风险,在出版物“modeling and analysis of a novel two-axis rotary electromagnetic actuator for fast steering mirror”中,必须将运动部件安装在挠性安装的杆上,以引导运动部件的运动。杆的弯曲刚度必须足够高以防止粘附,这对于电力消耗是极其有害的。这种构造需要提供形状与磁体的磁化要求特别是极化方向不立即兼容的磁体,从而意味着高生产成本。这种构造不容易实现或使用。
[0006]
可替代地,出版物“design of a moving-magnet electromagnetic actuator for fast steering mirror through finite element simulation method”提议将永磁体安装在设计成支撑镜子的可移动盘上。这种构造增加了可移动盘的重量。此外,线圈的动态通量流过永磁体,这增加了电力消耗。最后,该机构利用正态磁阻变化产生的磁力,这可能会导致运动部件粘附或撞击到定子上。这种构造还使用挠曲安装的杆进行引导,这也不利于消耗。
[0007]
从现有技术的配置中可以看出,在运动部件和致动装置之间可能发生粘附的风险,这强加了相对刚性的引导机构,并因此增加了电力消耗。
技术实现要素:
[0008]
本发明的一个目的在于提供一种磁致动器,其更易于制造并且其用于获得可移动
电枢的运动的电力消耗减少了。致动器有利地设计成形成瞄准装置的一部分,优选地是光学瞄准装置。为此,磁致动器包括定子和相对于定子可枢转地安装的可移动电枢。
[0009]
定子具有:
[0010]-由磁性材料制成的定子芯,其包括通过支撑件连接的第一和第二凸缘,
[0011]-安装在第一凸缘的一端上的第一磁体,
[0012]-安装在第二凸缘的一端上的第二磁体,第一和第二磁体具有轴向磁化,可移动电枢沿第一轴定向,第一和第二磁体磁体在垂直于第一轴的第二轴上对准,
[0013]-至少第一线圈,其在支撑件和第一磁体之间围绕第一凸缘装配。
[0014]
可移动电枢在第二轴上布置在第一和第二磁体之间,并且在第二轴和第三轴上的尺寸分别大于可移动电枢在第一轴上的尺寸,第三轴垂直于第一轴和第二轴。可移动电枢与第一凸缘的一端和第一磁体限定第一空气间隙,并且与第二凸缘的一端和第二磁体限定第二空气间隙,并且在第二轴上具有相对的第一和第二端。
[0015]
引导件将可移动电枢与定子机械连接,该引导件构造为允许可移动电枢绕平行于第三轴的第一旋转轴线旋转并且防止可移动电枢在第二轴上朝向第一磁体和第二磁体移动。
[0016]
第一磁体与可移动电枢的第一端和第一凸缘磁耦合以形成第一静态磁路。第二磁体与可移动电枢的第二端和第二凸缘磁耦合以形成第二静态磁路。第一线圈与可移动电枢的第一端和第二端、第一和第二凸缘以及支撑件磁耦合以形成第一动态磁路。
[0017]
优选地,第一凸缘和第二凸缘主要在第一轴上从支撑件向上延伸,并且第一和第二磁体在第一轴上布置在第一和第二凸缘的延伸部中。
[0018]
根据本发明的一个改进,第一和第二磁体的厚度与可移动电枢的厚度之比在0.8至1.2之间,该厚度在第一轴上测量。
[0019]
有利地,第一和第二磁体在第一轴上的中平面是可移动电枢的中平面。
[0020]
在一改进中,由磁性材料制成的第一和第二极分别放置在第一和第二磁体上,第一和第二极通过第一和第二磁体与第一和第二凸缘分开。
[0021]
有利地,第一磁体和可移动电枢之间的最小距离大于或等于第一凸缘和可移动电枢之间的最小距离。
[0022]
在优选配置中,第二线圈围绕第二凸缘安装在支撑件和第二磁体之间,第二线圈形成第一动态磁路的一部分。
[0023]
在另一改进中,引导件通过至少第一附接点固定到定子,并且通过多个第二附接点固定到可移动电枢。引导件包括在第一轴上限定通槽的主体,该通槽呈指向至少第一附接点的螺旋形式。通槽在第二轴和/或第三轴上将至少第一附接点和多个第二附接点分开。
[0024]
优选地,磁致动器包括分别安装在定子芯的第三和第四凸缘上的第三和第四磁体,第三和第四磁体具有轴向磁化,可移动电枢平行于第一轴且在第三轴上对准。可移动电枢在第三轴上具有相对的第三和第四端,其通过第三和第四空气间隙与第三和第四凸缘的端部以及与第三和第四磁体分开。可移动电枢在第三轴上布置在第三和第四磁体之间。
[0025]
第三磁体与可移动电枢的第三端和第三凸缘形成第三静态磁路。第四磁体与可移动电枢的第四端和第四凸缘形成第四静态磁路。附加线圈与第三和第四端、第三和第四凸缘以及支撑件形成附加动态磁路。
[0026]
在特定配置中,第一磁体和第二磁体的磁化处于第一磁化方向,并且第三和第四磁体的磁化处于与第一磁化方向相反的第二磁化方向。可替代地,第一、第二、第三和第四磁体具有相同的磁化方向。
[0027]
在特定实施例中,可移动电枢具有与至少一个涡流传感器探头协作的至少一个目标,以检测可移动电枢围绕第一旋转轴线的运动,至少一个目标和至少一个涡流传感器探头通过可移动电枢与至少第一线圈和支撑件分开。
[0028]
有利地,可移动电枢具有固定在可移动电枢上并分别在第一轴和第二轴上对准的两对目标。定子包括两对涡流传感器探头,以通过差模检测可移动电枢绕第一旋转轴线和第二旋转轴线的旋转。两对涡流传感器探头由在环形电子印刷电路板上由导电材料制成的弯曲形成。
[0029]
在另一改进中,将负载固定在可移动电枢的第一主表面上,负载通过可移动电枢与第一线圈以及如果适用的话与第二、第三和第四线圈分开。
[0030]
优选地,负载借助于负载支撑件机械地连接至可移动电枢,负载通过第一附接点固定至负载支撑件,负载支撑件通过第二附接点机械地连接至定子。负载支撑件由板形成,该板在第一轴上限定四个第一通槽,第一槽沿着具有第一凹度的第一弯曲路径从负载支撑件的外围延伸到负载支撑件的中心以限定四个区域,并且限定至少第三槽,其从第一槽开始以围绕中心的圆弧延伸。
[0031]
负载支撑件在第一轴上包括四个第二通槽。第二槽沿着具有第一凹度的第二弯曲路径从负载支撑件的外围延伸至第一槽。每个区域包括第二槽,以在每个区域中限定两个基本区域,第一和第二附接点交替布置。第一附接点或第二附接点将第一槽和相继的第二槽分开,第三槽在中心和第二槽之间延伸。
[0032]
在有利的构造中,引导件固定在可移动电枢的第一主表面上,而负载支承固定在可移动电枢的第二主表面上。
[0033]
在另一优选构造中,引导件通过穿过可移动电枢的贯通孔的螺栓固定在负载支撑件上。有利地,至少一个目标安装在螺栓之一上。
[0034]
还有利的是,将负载设置为反射元件,并且优选地将反射表面放置在与目标相同的平面中和/或将反射元件安装在环形电子电路内部。
[0035]
本发明的另一目的是提供一种机电系统,其能够改善对运动部件的致动并确保在没有动力施加到运动部件时对运动部件进行更有效的阻尼。
[0036]
有利的是提供一种机电系统,该机电系统设置有根据前述配置之一的磁致动器并且包括限定至少第一线圈的第一电源电路的控制电路或者至少连接至第一线圈的端子的电阻尼电路。电阻尼电路包括电阻器和电容器以形成rlc电路。
附图说明
[0037]
从以下仅出于非限制性示例目的给出并在附图中表示的本发明的特定实施例和实施方式的描述,其他优点和特征将变得更加明显,其中:
[0038]
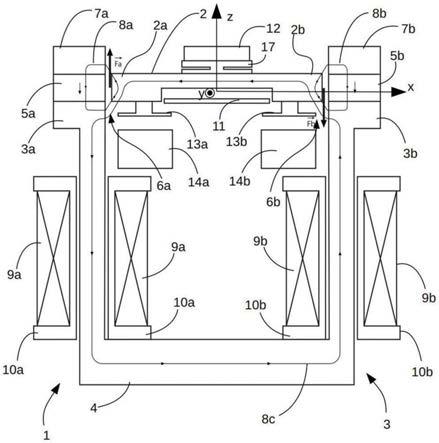
图1示意性地示出了具有与永磁体和致动线圈相关的定子芯的磁致动器的剖视图;
[0039]
图2示意性地示出了具有与永磁体和致动线圈相关的定子芯的磁致动器的另一实
施例的剖视图;
[0040]
图3示意性地示出了布置在永磁体之间的可移动电枢的特定构造的俯视图;
[0041]
图4示意性地示出了与永磁体和致动线圈相关的定子芯的透视图,其中在永磁体之间安装有可移动电枢;
[0042]
图5示意性地示出了具有与永磁体和致动线圈相关的定子芯的磁致动器的替代实施例的剖视图;
[0043]
图6示意性地示出了通过可变形的负载支撑件安装在运动部件上的镜子的分解透视图,可移动电枢安装在引导件上;
[0044]
图7示意性地示出了连接到定子的控制电路。
具体实施方式
[0045]
参照图1、2和5,磁致动器包括与可移动电枢2协作的定子1。定子1被认为是固定部件,并且可移动电枢2安装成可相对于定子1旋转运动。定子1包括定子芯3,该定子芯3由磁性材料制成,优选地由软磁性材料例如铁磁材料制成。定子芯3可以由fesi、feco或称为“软磁复合物”的材料制成,所述材料例如是被电绝缘膜包围的铁磁材料粉末。定子芯3有利地没有任何永磁体。
[0046]
定子1构造成使可移动电枢2围绕彼此垂直的一个或两个旋转轴线旋转。寻求的运动是滚动和/或俯仰运动,而不是偏航运动。优选地,可移动电枢2旋转小于20
°
的角度范围。
[0047]
如图1、2、4和5所示,定子芯3包括支撑件4,多个凸缘从该支撑件延伸,特别是包括第一凸缘3a和第二凸缘3b。磁致动器具有与可移动电枢2协作的第一磁体5a和第二磁体5b。磁体5a/5b是相对于线圈优选地选择的永磁体,因为其使得能够在不施加电源时以无源方式施加固定磁场以限定静止位置。第一磁体5a和第二磁体5b磁耦合至凸缘3a/3b和可移动电枢2。
[0048]
第一磁体5a位于第一凸缘3a的顶部,第二磁体5b位于第二凸缘3b的顶部。第一和第二磁体5a,5b是具有轴向磁化而不是径向磁化的磁体。两个磁体5a/5b的磁化方向平行于第一轴z。换句话说,磁体5a和5b的“北-南”方向平行于z轴。第一和第二磁体的磁化方向是相同的,即两个磁体的“北-南”方向是平行的,并且指向相同的方向。凸缘优选地由永磁体终止。以有利的方式,两个磁体5a/5b直接固定到两个凸缘3a/3b的端部。在磁场线逸出到可移动电枢2的端部2a/2b之前,凸缘引导源自磁体的磁场线。磁体5a/5b通过凸缘3a/3b与支撑件4分开。
[0049]
第一磁体5a和第二磁体5b在垂直于第一z轴的第二x轴上对准。可移动电枢2布置在第一磁体5a和第二磁体5b之间。可移动电枢2、第一磁体5a和第二磁体5b在第二x轴上对准。可移动电枢2具有在第二x轴上彼此相对的第一端2a和第二端2b。优选地,第一磁体5a的中心、第二磁体5b的中心和可移动电枢2的中心在x轴上对准。中心在z轴上测量。
[0050]
如图1、2和3所示,可移动电枢2通过第一空气间隙6a与第一磁体5a和凸缘3a的端部分开。可移动电枢2通过第二空气间隙6b与第二磁体5b分开。第一端2a基本面对第一磁体5a,第二端2b基本面对第二磁体5b。两端2a/2b通过磁性材料连接以形成在两端之间引导场线的磁路。
[0051]
根据构型,可移动电枢2为实心部分或优选为有孔部分的形式。可移动电枢2具有
平面构造,并且可以是盘的形式或具有多个平坦点的盘的形式。有利地,可移动电枢的端部2a/2b由面对磁体5a/5b的平坦点形成。磁体具有面向端部的平坦表面,以便在可移动电枢2和磁体5a/5b之间限定基本恒定的空气间隙。空气间隙6a/6b具有足以使可移动电枢2的角运动不引起可移动电枢2与定子1之间的碰撞的厚度。
[0052]
通常,选择由第一和第二磁体5a和5b施加的磁化线和方向以施加静态场hsa和hsb,其在x轴上的分量在空气间隙6a和6b的区域中是相反方向的。
[0053]
第一磁体5a与可移动电枢2的第一端2a和第一凸缘3a形成第一静态磁路8a。第二磁体5b与可移动电枢2的第二端2b和第二凸缘3b形成第二静态磁路8b。在图1所示的实施例中,两个磁体5a和5b布置成具有指向凸缘5a/5b的南北磁化。
[0054]
具有矩形形状的磁体是有利的,以促进致动器的制造,降低致动器的成本并实现对施加的磁力的更好控制。磁体可以由smco或ndfeb制成。
[0055]
两个磁体5a和5b有利地由形成磁极7a/7b并且有利地选自fesi、feco的软磁性材料和称为“软磁性复合物”的材料覆盖。定子1具有覆盖第一磁体5a的第一极7a和覆盖第二磁体5b的第二极7b。第一磁极7a通过第一磁体5a与第一凸缘3a隔开,第二磁极7b通过第二磁体5b在z轴上与第二凸缘3b隔开。优选地,每个极7a/7b与磁体5a/5b直接接触。磁极的使用改善了磁场线在第一和第二静态磁路8a和8b中的引导,并增强了与可移动电枢2的磁耦合。特别有利的是,对于第一凸缘3a和第二凸缘3b与其相关磁体5a/5b及可能其磁极7a/7b具有相同的结构。
[0056]
如上所述,磁体5a产生流过第一静态磁路8a的第一静态磁通量。第一静态磁路8a从第一磁体5a开始,然后穿过第一凸缘3a、空气间隙区域6a、可移动电枢2的端部2a、再次空气间隙区域以及磁极7a。该通量在空气间隙区域6a中产生静态磁场hsa,从而对其进行磁极化。磁体5b产生流过第二静态磁路8b(类似于磁路8a)的第二静态磁通量。第二静态磁路8b从第二磁体5b开始,然后穿过第二凸缘3b、空气间隙区域6b、可移动电枢2的端部2b、再次空气间隙区域以及磁极7b。该通量在空气间隙区域6b中产生静态磁场hsb,从而对其进行磁极化。磁路8a和8b的磁场线在空气间隙6a和6b中在x和z轴上具有分量。磁场线在第一和第二端2a和2b中在x和z轴上具有分量。
[0057]
在图2所示的实施例中,不存在磁极7a和7b。与在x轴上支撑磁体5a/5b的凸缘3a/3b的端部相比,磁体还可以设置成远离端部2a/2b。磁体5a/5b相对于凸缘的偏移可以在图1的配置中应用。
[0058]
源自磁体5a和5b的两个磁通量在可移动电枢2的两个相对端上施加两个磁吸引力。可移动电枢2的角位置被调节以减小沿x轴建立的限定可移动电枢2的静止位置的磁阻。优选地,两个磁体5a/5b是相同的,并且布置为使得所产生的磁场的强度(绝对值)|hsa|和|hsb|相等。
[0059]
定子1还包括至少第一线圈9a,优选地第一线圈9a和第二线圈9b,其施加与可移动电枢2的两个相对端2a和2b相互作用的动态磁场hd。如图1所示,在第一凸缘3a、支撑件4、第二凸缘3b、空气间隙6b、可移动电枢2和空气间隙6a之间存在动态磁路8c。通常,与由于磁体的磁场hsa和hsb不同,动态磁场hd在x轴上的分量在空气间隙区域6a和6b中处于同一方向。
[0060]
支撑件4以及第一和第二凸缘3a/3b由磁性材料制成。支撑件4由磁性材料制成,以便在凸缘之间引导线圈的场线。如图1所示,当在横向切割平面中观察时,定子芯3是u形的。
有利地,支撑件4与两个凸缘3a/3b是整体的或一体的。支撑件4可以是实心的或带孔的。定子芯3引导动态磁场线。
[0061]
以有利的方式,由凸缘3a/3b和支撑件4形成连续的磁路,以增加可移动电枢2的两个相对端2a和2b附近的空气间隙6a和6b中的磁场强度。磁路8c的磁场线在空气间隙6a和6b中在x和z轴上具有分量。磁场线在第一和第二端2a和2b中在x和z轴上具有分量。如图1中沿包含x和z轴的平面的截面图所示,有利的是使线圈、磁体和凸缘属于垂直于旋转轴线的同一个平面。
[0062]
第一线圈9a围绕第一凸缘3a布置在支撑件4和磁体5a之间。当第一致动线圈9a通电时,其产生磁场。有利地,第二线圈9b围绕第二凸缘3b布置,以使得更容易在空气间隙6a和6b中获得强磁场。该第二线圈9b可以与第一线圈9a形成冗余,以便在故障的情况下可以从第一线圈9a接管。
[0063]
场线通过第一凸缘3a然后通过支撑件4和第二凸缘3b在定子芯3中引导。场线通过空气间隙6b从第二凸缘3b离开,到达由磁性材料制成的可移动电枢2的第二端2b,并穿过可移动电枢2。场线从第一可移动电枢2的第一端2a经由空气间隙6a连接到第一凸缘3a。可移动电枢2的面对空气间隙6a、6b的两个相对端部2a/2b经受由磁体5a/5b产生的磁场和由第一线圈9a产生的磁场。
[0064]
在线圈9a中施加电流导致空气间隙6a和6b之间的总场不对称。在图1的示例中,由于线圈9a引起的场hd在由于磁体5b的场hsb的方向上取向,并且在与由于磁体5a的场hsa相反的方向上取向。因此,与没有施加电流的场hsa相比,空气间隙6a中的总场hta=hsa-hd减小,这减小了可移动电枢的端部2a朝向凸缘3a的端部的吸引力。相反,与没有施加电流的场hsb相比,空气间隙6b中的总场htb=hsb+hd增加,这增加了可移动电枢的端部2b朝向凸缘3b的端部的吸引力。
[0065]
如图1、2、4、5和6所示,为了获得可移动电枢2相对于定子1的旋转运动,有利的是使用引导件11,该引导件允许可移动电枢2绕平行于垂直于第一轴z且垂直于第二轴x的第三轴y的第一旋转轴线旋转。优选地,引导件11构造成防止可移动电枢2在x轴上的平移运动,以防止任何粘附或接触两个磁体5a/5b之一。
[0066]
有利地,将引导件11构造成仅允许绕垂直于z轴的旋转轴线旋转。引导件11可以配置为防止垂直于z轴的任何平移。通过仅允许绕垂直于z轴的旋转轴线的一个或多个旋转,可移动电枢2的两个相对端处的磁场的改变导致主要在z轴上与面对的磁体表面相切的运动。这种运动伴随着凸缘3b的端部与位于磁体5b前面的可移动电枢的端部2b的表面之间的面对的空气间隙表面的增大,从而减小空气间隙6b的磁阻,而无需减小空气间隙6b的厚度。空气间隙6b的磁阻的这种减小源自施加在可移动电枢的端部2b上的力fb。以相反的方式,空气间隙6a的磁阻的增加源自施加在可移动电枢的端部2a上的力fa。
[0067]
这导致在可移动电枢2的第一端2a和第二端2b处存在的磁力形成扭矩,从而使可移动电枢2绕平行于y轴、垂直于连接两端的x轴的旋转轴线旋转。
[0068]
在第一线圈9a中施加的电流的强度定义了通量的力,并且电流的方向定义了通量的方向。当动态磁路通过可移动电枢的两端时,由第一线圈9a施加的通量将与两个静态磁路之一的方向相同,并且与导致旋转的另一静态磁路的方向相反。电流方向的反向使力的方向反向,从而使旋转的方向反向。
[0069]
线圈9a/9b由至少一根导线的绕组形成,例如漆包铜线。由磁性材料制成的凸缘引导磁场线,从而将源自线圈9a和9b的动态磁场hd添加到空气间隙6a和6b中的源自磁体5a和5b的静态磁场hs中或从中减去。
[0070]
在有利的实施例中,第一和第二线圈9a和9b被供应相同的电流源,以使相同的电流流过两个线圈。优选地,第一和第二线圈9a和9b串联连接,使得供应它们的电流产生额外的场。这样,当同一个电流流动时,线圈9a和9b在凸缘3a和3b中施加相反方向的磁场和相同强度的磁场。在替代实施例中,线圈9a和9b由不同的电流源供应。因此,每个线圈可以确保冗余,即使在供电线圈或电路出现故障时也可以使致动器工作。
[0071]
与线圈9a和9b相关的一个或多个电流源配置为提供不同的电流强度以及一个或多个线圈中的两个不同的电流方向,以使可移动电枢2在两个旋转方向上并且连续在可接近范围内旋转。
[0072]
在图1、2、4和5所示的有利实施例中,线圈9a和9b形成在线圈支撑件10a和10b上。线圈支撑件10a和10b由非导电材料制成,从而防止线圈9a/9b与定子芯3之间的任何短路。这种构造使得易于安装线圈9a和9b。
[0073]
如上所述,可移动电枢2在两个磁体5a、5b之间位于定子1的内部。可移动电枢2包括形成两个端部2a/2b的磁性部分。
[0074]
有利地,可移动电枢2与磁体之间的厚度比在0.8至1.2之间。优选地,可移动电枢2的厚度在z轴上等于第一和第二磁体5a/5b的厚度。优选地,静止的可移动电枢2的中平面与磁体5a/5b的中平面对准,甚至更优选地当致动器设置有磁极7a/7b时。中平面对应于在z轴上距磁体或可移动电枢2的两个相对表面相等距离的平面。在没有磁极7a/7b的情况下,有利的是将可移动电枢的中平面布置成其与磁体5a/5b和凸缘3a/3b之间的界面对准。
[0075]
可移动电枢2具有平面形状。可移动电枢2有利地在x轴上的长度和在y轴上的宽度大于其在z轴上的厚度,例如大至少三倍。可移动电枢2主要沿x和y轴延伸。可移动电枢2有利地具有平行于z轴的对称轴线。优选地,可移动电枢2的对称轴线与定子芯3或至少凸缘的对称轴线共线。可移动电枢2具有通过侧壁连接的相对的第一和第二主表面。侧壁限定相对的第一和第二端2a、2b。第一主表面设计成接收使得要相对于定子旋转的负载。负载可以是镜子、样品或任何其他要旋转的物品。
[0076]
在图1、2、3、4和5所示的实施例中,可移动电枢2在x轴上的尺寸稍小于两个磁体5a/5b之间的分离距离、两个凸缘3a/3b之间的分离距离以及两个极7a/7b之间的分离距离之间的最小距离,以提供磁性空气间隙6a/6b并且当旋转发生时防止可移动电枢2与凸缘3a/3b、磁体5a/5b和极7a/7b之间的任何接触。与可移动电枢2在x轴上的尺寸相比,将空气间隙6a/6b的宽度选择为较小。
[0077]
可移动电枢2的两个主表面在z轴上不通过凸缘或磁体重叠,从而防止任何接触危险。这些表面可以是严格平整的、带有倒角的平整的或在包含x和z轴的切割平面中稍微倒圆的,例如倒圆的直径等于可移动电枢2的x轴的尺寸。
[0078]
为了防止可移动电枢2粘附在磁体上,将可移动电枢2安装在引导件11上,该引导件11限制或防止可移动电枢2在垂直于z轴的平面中移动。可移动电枢2通过引导件11机械地连接到定子,例如机械地连接到定子芯3。引导件11有利地固定地安装在定子芯3上。使用防止可移动电枢在x轴和y轴上平移并优选地防止在包含第一轴和第二轴的平面中的任何
平移的引导件11是特别有利的。选择不同于挠曲杆的引导件是特别有利的,因为这种构造不排除粘附在磁体上,同时难以致动以进行旋转。引导件11有利地构造成防止绕第三轴z旋转。引导件限定基本包含在引导件11的体积中的一个或多个旋转轴线。引导件可以构造成允许可移动电枢2围绕垂直于z轴的旋转轴线旋转并且防止垂直于z轴的平移,从而在旋转时更容易获得恒定或准恒定的空气间隙。在振动的情况下,还可以防止粘附的风险。
[0079]
两个凸缘3a/3b主要或仅在垂直于第二轴x和第三轴y的第一轴z上从支撑件4开始延伸。
[0080]
引导件11可以固定地安装在定子1上,例如固定在定子芯3上。引导件11支撑可移动电枢2的重量,同时允许可移动电枢2至少围绕第一旋转轴线的旋转运动。有利地,通过平坦的或基本平坦的板形成引导件,该板通过多个槽开孔,从而形成柔性引导轴承。槽、定子1的附接点和可移动电枢2的附接点布置成便于绕x和y轴旋转并限制其他运动。槽在z轴上直通。
[0081]
通过使用具有由槽形成的孔的板形式的引导件,可移动电枢2可以旋转而不必克服摩擦力,从而能够获得小的角运动。通过带孔板的优先区域的变形获得旋转。
[0082]
在图5和6所示的实施例中,引导件11是由带孔主体形成的柔性引导轴承,该带孔主体例如是带孔板,其限定多个螺旋形或螺旋形段形式的槽。垂直于z轴安装板,以便于围绕垂直于z轴的轴线旋转。有利的是,在引导轴承的中央形成定子和柔性引导轴承之间的附接点。柔性引导轴承和可移动电枢之间的附接点位于柔性引导轴承的外围。柔性引导轴承可以由金属材料制成。这种柔性引导轴承使得在不引入任何摩擦的情况下更容易绕平行于y轴的第一旋转轴线和绕平行于x轴的第二旋转轴线进行旋转,从而更容易获得小旋转角,从而确保运动几乎不受限制,并且在不产生冲击的情况下很好地吸收力。引导件11是平面形状的,并且主要在x和y轴上延伸,其厚度小于其长度和宽度。有利地,引导件11固定在可移动电枢2的底部主表面上。引导件有利地形成旋转轴线,该旋转轴线包括在包含两个磁体5a/5b和两个凸缘3a/3b之间的界面的平面中。有利地,引导件包括平行于z轴的对称轴线。
[0083]
以有利的方式,将控制电路连接到一个或多个电流源。控制电路配置为使电流在一个或多个线圈9a和9b中流动。产生动态磁场hd,该动态磁场沿凸缘3a和3b以及支撑件4流动,直到其到达可移动电枢2的两端。图7示出了控制电路的特定实施例。
[0084]
通过沿着两个凸缘3a和3b施加具有相反分量的动态磁场,可以获得可移动电枢2的旋转。在图1所示的配置中,空气间隙6a中的场hd与空气间隙6a中的场hsa具有相同的方向。空气间隙6b中的场hd与空气间隙6b中的场hsb相反。
[0085]
线圈9a/9b中电流的流动方向定义了可移动电枢的旋转方向。根据所施加电流的方向,将磁场hd的值与静态磁场hsa和hsb的值相加或相减。在第一阶中,施加在可移动电枢2上的总磁扭矩以及因此旋转角度与电流强度i成比例。施加在线圈中的电流方向定义可移动电枢2相对于定子芯3的旋转角度的符号。磁致动器能够精确地限定相对于参考位置的旋转角度。所示的构造使得能够获得在围绕旋转轴线的两个方向上的旋转中可控的磁性机构。
[0086]
呈现的构造是特别有利的,因为它使得扭矩能够在没有任何机械接触的情况下传递到可移动电枢2,从而避免了必须克服摩擦力。可移动电枢2与磁体5a和5b或线圈9a和9b没有任何直接接触。可移动电枢也不与凸缘3a/3b任何接触。可移动电枢也没有磁体,从而
减小了要移动的重量。
[0087]
在有利的实施例中,将可移动电枢2的侧壁与磁体5a/5b的侧面(在x轴上)分开的最小距离小于磁体和可移动电枢的厚度。有利地,将可移动电枢2的侧壁与凸缘3a/3b的端部分开的最小距离比磁体和/或可移动电枢的厚度至少小两倍,优选地至少小五倍。
[0088]
提出的构造是非常有利的,因为其使得运动部件借助于运动铁类型的单个磁致动器绕旋转轴线运动。这样的配置是有利的,因为与需要多个致动器绕单个轴线执行旋转的设备相比,能够减轻设备的重量。
[0089]
在所示的构造中,一个或多个线圈9a/9b形成流过定子芯和可移动电枢的动态磁路。即使当使用两个线圈时,链接到动态磁路的单个磁场也会流过可移动电枢。与其中每个端部都与动态磁场相关的现有技术的配置相比,线圈9a和9b之间的电源差异或线圈之间的不同老化更容易掌握。
[0090]
在现有技术的构造中,通过在z轴上的空气间隙厚度的变化来获得磁阻力,这使得致动器的设计非常复杂,因为当发生旋转时空气间隙的值被相当大地改变并且可以达到导致可移动电枢、磁体或盘粘附在芯上。相反,根据本发明,通过垂直于x轴布置的空气间隙表面的变化而获得了磁阻力,这释放可移动电枢的顶部和底部以允许更大的旋转角度,同时防止与定子的磁粘附和碰撞。
[0091]
参照图3、4和5,磁致动器可以配置为产生绕分别平行于彼此正交且垂直于z轴的x和y轴的两个旋转轴线的角运动。可移动电枢2围绕x轴的旋转是通过与前述的构造相同的构造而实现的,所述构造围绕z轴偏移了90
°
。如图2所示,可移动电枢2包括与第三和第四磁体5c和5d协作的第三和第四端2c和2d。第三和第四端2c和2d通过磁路连接。
[0092]
定子芯3包括第三和第四凸缘3c和3d,它们的第一端分别被第三磁体5c和第四磁体5d覆盖,第三磁体5c和第四磁体5d是具有平行于z轴定向的轴向磁化的磁体。
[0093]
可移动电枢2布置在第三和第四磁体5c、5d之间,并且在y轴上与后者对准。可移动电枢2分别通过第三空气间隙6c和第四空气间隙6d与第三和第四磁体5c、5d分开。在线圈9a、9b、9c、9d上没有偏压的情况下,可移动电枢2和两对磁体有利地属于同一个平面。该平面垂直于z轴。
[0094]
第三和第四磁体5c和5d分别一方面与第三凸缘3c和可移动电枢2的第三端2c以及另一方面与第四凸缘3d和可移动电枢2的第四端2d形成第三和第四静态磁路。相对的第三和第四端2c/2d在y轴上对准。对于先前的实施例,在第三和第四磁体5c/5d上使用磁极7c和7d是有利的。
[0095]
附加线圈9c围绕第三凸缘3c装配。附加线圈9c产生第二动态磁场,其具有由第三凸缘3d、支撑件4和第四凸缘3d引导的场线,直到到达可移动电枢2的第四端。源自可移动电枢2的第四端2d的场线借助于磁性材料穿过可移动电枢,直到它们到达第三端2c,然后到达第三凸缘3c。
[0096]
第三和第四磁体5c/5d限定了可移动电枢绕x轴的静止位置。附加致动线圈9c施加磁场,使可移动电枢2沿x轴在一个方向或另一方向上旋转。
[0097]
如前所述,有利的是使用分别绕第三凸缘3c和第四凸缘3d安装的第三和第四线圈9c和9b,以便在第三和第四空气间隙6c/6d中产生的动态磁场线相同,从而改变存在于可移动电枢2、凸缘3c、3d的端部和两个磁体5c、5d之间的磁耦合的强度。
[0098]
第一组线圈9a/9b和磁体5a/5b确保绕y轴旋转,第二组线圈9c/9d和磁体5c/5d确保绕x轴旋转。
[0099]
具有两个旋转轴线的磁性操作类似于具有通量密度分布和具有更复杂路径的场线分布的单个旋转轴线的操作。布置具有轴向极化的每对磁体,以使可移动电枢沿z轴定向。对于在x轴或y轴上彼此面对的两个磁体,即对于协作以确保绕旋转轴线之一旋转的两个磁体的磁化方向是相同的。有利的是,使绕第一通路进行旋转的一对磁体呈现与绕第二轴进行旋转的一对磁体相反的磁化方向。换句话说,第一和第二磁体5a/5b具有与第三和第四磁体5c/5d相反的磁化方向。当围绕可移动电枢2进行观察时,磁体的磁化方向的变化存在于z轴上。这种构造使得能够减小致动器的偶极矩并且能够维持弱的四极矩。然而,也可以使用具有相同磁化方向的四个磁体。
[0100]
通过仅激活线圈9a和9b,可以使可移动电枢2绕y轴旋转。通过仅激活线圈9c和9d,可以使可移动电枢2绕x轴旋转。通过激活线圈9a,9b,9c和9d,可以组合围绕两个旋转轴线的旋转。
[0101]
有利的是,线圈9c和9d由同一个的电流源供电,并且如关于线圈9a和9b所说明的那样串联连接。其他实施例也是可能的。
[0102]
就磁场强度及其可能的尺寸而言,使四个磁体相同是有利的,因为这导致可移动电枢2的致动更容易实现。在所示的实施例中,致动器仅包括两个磁体以实现围绕旋转轴线的旋转,即四个磁体以实现围绕两个垂直轴线的旋转。优选地,磁体包含在也包含可移动电枢的平面中。致动线圈属于偏离磁体平面的另一平面。由可移动电枢2的中平面限定并且垂直于z轴的半空间将致动线圈和要移动的负载分开。由磁体产生并由凸缘引导的磁场线在可移动电枢的底部主表面的方向上从侧表面偏离凸缘。
[0103]
磁致动器可以形成光学瞄准装置的一部分,该光学瞄准装置包括辐射源和/或所述辐射的传感器。
[0104]
镜子12或任何其他反射元件可以安装在可移动电枢2的顶表面上。镜子12可以配置为反射光学和/或红外辐射。还可能的是,反射元件12配置为反射另一电磁辐射。这种构造是特别有利的,因为可移动电枢2的顶表面没有直接连接到位于可移动电枢2外部(例如在芯上)的另一部分,这会妨碍或使可移动电枢2的旋转复杂化。可移动电枢2的底表面面对定子芯。镜子12固定安装在可移动电枢的顶表面上,从而可移动电枢2的旋转导致镜子12的相同旋转。
[0105]
镜子12可以配置成与辐射源例如激光器协作。辐射源发出光束,该光束撞击镜子,并且镜子12的定向使反射的光束被发送回传感器。通过改变镜子12的定向,可以将光束发送回多个不同的传感器。镜子12的定向还使得可以相对于辐射源的位置适应于传感器的位置的修改。取决于实施例,辐射源或传感器可以相对于定子芯3移动。
[0106]
光学瞄准装置可以用于两个物体之间例如两个卫星之间的光学通信系统。每个物体具有与光学信号发射器和/或接收器相关的光学瞄准装置。镜子12的角位置可以被环锁控制,以将光束从第一物体引导到第二物体并考虑物体之间的运动。镜子12的角位置可以被环锁控制,以便将接收到的光束引导到光学信号传感器。随着信号源的移动,必须更改镜子的定向以将其反射到传感器上。
[0107]
在另一实施例中,反射装置由样品架或待分析的样品代替。例如,致动器可以形成
衍射仪的一部分。可移动电枢包括参考样品。可移动电枢的旋转使参考样品面向电磁辐射束(例如x射线)或粒子(例如中子),以使束发生衍射。可以用样品架代替参考样品,或者可移动电枢可以包括参考样品和样品架。
[0108]
在特定实施例中,由目标13a/13b和探头14a/14b形成的内部传感器系统集成在致动器中。一个或多个目标13a和13b固定安装在可移动电枢2上。目标13a和13b与传感器14a和14b协同工作,传感器14a和14b配置为测量可移动电枢2相对于定子芯3的位置并因此跟随可移动电枢2相对于定子芯3的旋转。有利地,传感器14a/14b是涡流类型的磁传感器探头。以有利的方式,目标13a/13b在x轴上对准以对围绕y轴的旋转具有最大的敏感性。以有利的方式,目标13a、13b和探头14a、14b通过可移动电枢2与定子芯3和/或与线圈9a/9b分离,从而位于负载12所在的一侧。以有利的方式,目标13a/13b的面对探头14a/14b的表面与形成负载的镜子12的反射表面位于同一平面中,这使得能够精确地测量镜子12的反射表面的运动。也可以使用磁性传感器、电容性传感器和光学传感器来测量可移动电枢2的区域的线性行程并从中推导出相关的旋转角度。
[0109]
传感器探头14a/14b配置为测量将目标13a/13b与相关的传感器14a/14b分开的距离。传感器14a/14b与控制电路相关,该控制电路配置为在测量传感器14a/14b与目标13a/13b之间的接近和远离之后计算可移动电枢2的旋转角度。有利地,两个目标13a/13b布置在垂直于可移动电枢2的旋转轴线的轴线上。这两个目标13a/13b与两个传感器协作。一个传感器检测到目标的接近,而另一个传感器检测目标的远离,从而可以确定旋转方向。信号的强度使得可以确定旋转角度的值。也可以使用单个传感器进行操作,但由于精度较低,因此不太有利。通过将两个传感器用于一个旋转轴线,就可以进行差分测量,从而可以补偿可移动电枢或定子由于驱动线圈加热而产生的热膨胀效应。致动器可以利用没有内部传感器的优势来实现最大角度行程。然后使用外部传感器对这些行程进行监视。
[0110]
由导热材料例如金属制造定子芯3是特别有利的。这使得能够实现源自线圈9a,9b,9c和9d的热通量的良好传递。良好的散热限制了热量传递到包括反射元件12的可移动电枢2,该反射元件的光学特性和/或尺寸可能随温度变化。
[0111]
有利的是,将定子芯3与散热器耦合,以消除由线圈9a,9b,9c和9d产生的一部分热量。散热器接口有利地布置在支撑件4上。散热器的使用使得能够使用更高值的电流。由于可移动电枢2未与定子铁芯3物理耦合,因此定子芯3中存在的热量难以流通到可移动电枢2。在图4所示的实施例中,致动线圈沉入树脂15中以促进散热。树脂与散热器接口热连接。
[0112]
如图6所示,有利的是将负载支撑件17安装在可移动电枢2的顶表面上,以便传递可移动电枢2的旋转运动而不会引起镜子12的任何变形。负载支撑17更优选地构造为使反射元件12对至少给定温度范围内的温度变化不敏感。负载支撑件17防止反射元件由于由致动器尤其是线圈引起的温度变化而引起的修改和变形。负载支撑件17构造成限制可移动电枢2和反射元件12之间的热通量。
[0113]
在图5和6所示的优选实施例中,反射装置12是包括四个固定凸耳的镜子。镜子通过负载支撑件17安装在可移动电枢2上。负载支撑件17执行负载12和可移动电枢2之间的机械连接。负载支撑件17为板的形式,包括彼此机械连接的多个区域以形成一体或整体元件,但同时具有可以在z轴上以几乎独立的方式相对于彼此移动的区域。负载12通过第一附接点固定在负载支撑件17上,此处以螺栓20b的形式。负载支撑件17经由第二附接点机械地连
接至可移动电枢2,此处以螺栓20a的形式。
[0114]
每个区域具有负载支撑件17与负载12和可移动电枢2的附接点。每个区域在z轴上通过第一通槽18a与相邻区域分开。
[0115]
有利地,每个区域通过第二槽18b被分成两个基本区域。一个基本区域具有到负载12的附接点,而另一个基本区域具有到可移动电枢2的附接点。为了增加机械独立性和附接点在z轴上接近平移的移动,提供以圆弧延伸的第三和优选第四槽18c和18d是有利的。优选地,第三和第四槽基本上限定两个同心圆。第三和第四槽18c、18d沿相反的方向远离槽18a延伸,使得每个附接点机械地连接至固定环,该固定环机械地连接所有附接点。
[0116]
负载支撑件17包括多个通槽或凹槽18a,18b,18c和18d,其布置成在垂直于z轴安装负载支撑件17时增强附接点或具有可移动电枢2和沿z轴的反射元件12的点的柔性。
[0117]
负载支撑件17分成多个外围附接点,它们由第一槽18a彼此分开,第一槽从负载支撑件的外端开始并且朝向负载支撑件的中心前进。负载支撑件提高在z轴上的柔性,以补偿静态不确定性故障,例如在与反射装置的附接点中可能的高度差(在z轴上)。通过穿过孔19a并与螺母21a协作的螺栓20a,将负载支撑件17固定在可移动电枢2上。螺栓20a有利地执行对形成螺母21a的目标13的固定。平面镜子支撑件与镜子12的附接点可以是与螺栓20b以及可能的螺母21b以及优选地与垫圈22b配合的通孔19b。
[0118]
负载支撑件17由具有优选地基本上圆形的外部形状的板形成。负载支撑件17有利地包括四个不同的区域,它们通过旋转对称而重复。两个相继区域由第一槽18a隔开,该第一槽从外圆周沿负载支撑件17的中心方向延伸。轴承的中心有利地是对称中心。第一槽18不是直凹槽,而是优选具有曲率半径并且有利地具有恒定曲率半径的弯曲凹槽。不同区域通过保持环彼此机械连接。第一槽18a在保持环之前停止。每个区域包括到负载12的附接点和到可移动电枢2的附接点。支撑件具有在x轴上对准的两个区域和在y轴上对准的两个区域。
[0119]
每个区域被分成两个基本区域,每个包括固定杆和/或通孔。两个基本区域通过第二贯通凹槽18b分开,第二通槽从板的外圆周延伸到相邻的第一槽18a。贯通凹槽18b弯曲成具有与第一槽18a相同的方向的曲率,并且具有比第一槽18a的曲率半径大的曲率半径。第二贯通凹槽18b和第一槽18a有利地具有相同的凹度定向。基本区域之一固定到可移动电枢2,而另一基本区域固定到负载12。
[0120]
除了第一槽18a和贯通凹槽18b之外,该板还具有第三和第四系列的通槽18c/18d。两个系列的槽以具有两个不同曲率半径的圆弧的形式围绕中心延伸。有利地,两个系列的通槽共享相同的中心。第三系列通槽18c每区域包括一个通槽,并且每个第三通槽18c沿第一方向(即顺时针方向或逆时针方向)从第一槽18a延伸到相邻的第一槽18a,而没有到达相邻的第一槽18a以保持机械固定区域。
[0121]
第四系列通槽18d每区域包括一个通槽18d,并且每个第四通槽18d在与第一方向相反的第二方向上从第一槽18a延伸到相邻的第一槽18a,而没有到达相邻的第一槽18a以保持机械固定区域。
[0122]
负载支撑件17的这种构造允许每个区域相对于其在z轴上的相邻区域变形,并且允许在z轴上的同一个区域的两个基本区域之间变形。可以至少部分地补偿与将反射元件12固定到可移动电枢有关的不同元件之间的静态不确定性缺陷,特别是高度差(在z轴上),
从而减小在反射元件12中引起的机械应变。
[0123]
在示出的构造中,线圈全部布置在包含可移动电枢2的平面与磁体5a/5b/5c/5d和支撑件4之间,从而使得可以限制在设计成与反射装置或其他元件功能化的可移动电枢2的上部区域中的空间占用。与yongjun long的上述出版物“modeling and analysis of a novel two-axis rotary electromagnetic actuator for fast steering mirror”中提出的构造不同,运动部件未布置在由围绕镜子的线圈形成的碟形件中。所示的构造使得能够执行更大的角行程。
[0124]
在图5所示的实施例中,支撑件4在其中心开有孔,以允许致动线圈9a-9d的线退出。凸缘3a-3d仍从支撑件4延伸。凸缘固定在支撑件4上以形成整体组件。线圈9a,9b,9c和9d容纳在圆柱体16中,并沉入树脂15中以利于散热。支撑件4和凸缘3a-3d固定到第一壳体元件23a。线圈9a-9d以固定的方式安装在缸体16中,并通过树脂15固定有固定在第一壳体元件23a上的第二壳体元件23b。优选地,缸体16和第二壳体元件23形成整体部件。
[0125]
第三壳体元件23c固定在第二壳体元件23b上。第二壳体元件23b限定安装板24,引导件11通过螺栓25或任何其他固定装置固定在安装板24上。可移动电枢2通过引导件11和多个螺栓20a固定在安装板24上。引导件11借助于固定在壳体23c上或构成壳体23的一部分的安装板24而固定地安装在定子1上。
[0126]
镜子12通过负载支撑件17安装在可移动电枢2的第一表面上。目标13也围绕镜子12安装在可移动电枢2的第一表面上,例如在螺栓20a的端部。有利地通过涡流将传感器探头14安装在面向目标13的环形印刷电路板(pcb)上或集成在其中。将四个探头布置在单个pcb中的优点是提高了探头的可重复性并使其更容易后者的装配和互连,还可以降低成本。探头有利地是由形成在电子电路上的导电材料制成的弯曲。
[0127]
通过第三壳体元件23c将pcb电路固定到固定在第二壳体元件23b上的第四壳体元件23d上。传感器14相对于壳体和定子1固定地安装。第四壳体元件23d在z轴上限定面对反射元件的通孔,以允许电磁辐射通过。
[0128]
包括第三壳体元件23c、安装板24、螺栓25、引导件11、可移动电枢2、负载支撑件17、目标13和镜子12的子组件形成第二壳体元件23b和第四壳体元件23d的可拆卸光学头,这使得检查和安装在致动器中更加容易,从而降低了成本。
[0129]
磁致动器包括控制电路或与之相关,例如图7中所示的控制电路。控制电路具有一个或多个输入,其设计成用于接收要施加在可移动电枢2上的旋转设定点,例如信号cx和cy。控制电路可以具有设计成接收相对于围绕x轴(cx)的旋转的数据的输入和设计成接收相对于围绕y轴(cy)的旋转的数据的输入。根据接收的数据,控制电路将第一电流ix施加到第一线圈或一对线圈以引起绕x轴的旋转,并且将第二电流iy施加到第二线圈或一对线圈以引起绕y轴的旋转。根据所需的旋转来定义第一电流ix的强度及其流动方向。根据所需的旋转来定义第二电流iy的强度及其流动方向。例如,为了给第一线圈9a或两个线圈9a/9b供电,可以使用第一电流控制放大器27。用第二电流控制放大器27向第三线圈9c或两个线圈9c/9d供电的情况也可以相同。
[0130]
如图所示,从传感器14a/14b接收第一数据是有利的,以便评估可移动电枢2围绕第一旋转轴线的有效旋转,并且如果必要的话,调节电流值以获得所需的倾斜角。来自第二对传感器的第二数据可用于监视围绕旋转轴线的旋转并调整施加的电流值。控制电路可以
具有连接到第一和第二对传感器的第三和第四输入,以接收代表有效旋转s1和s2的信号。还可以使控制电路具有附加的第一和第二输入,其设计成连接到外部传感器,例如接收由反射装置反射的通量的光学传感器。来自外部传感器的数据用于调整可移动电枢的静态和/或动态角度位置。当致动器与相对于致动器可移动的元件一起操作时,外部传感器使得能够实现对可移动电枢2的位置的伺服控制。外部传感器可以发出代表有效旋转或将光束保持在所需位置的旋转的信号se1和se2。
[0131]
控制电路可以设置有阻尼电路,该阻尼电路用于在致动器未通电时电阻尼致动器的运动。阻尼电路与一个或多个线圈形成rlc电路。
[0132]
安装第一开关26以将涉及引起绕y轴旋转的一个或多个线圈连接到电流源或阻尼电路。阻尼电路具有有利地由优选地与电容器c串联连接的电阻器r形成的电负载。阻尼电路经由第一端子连接至一个或多个线圈,并且经由第二端子连接至固定电势,例如接地。
[0133]
可以安装第二开关26以将涉及引起绕x轴旋转的一个或多个线圈连接到电流源或阻尼电路。阻尼电路具有有利地由与电容器串联连接的电阻器形成的电负载。阻尼电路通过第一端子连接到一个或多个线圈,并且通过第二端子连接到固定电势,例如接地。这两个开关可以通过施加在其控制电极上的信号dx和dy独立地操作。
[0134]
该阻尼电路对在机构共振时引起的振动进行阻尼。当机构受到嵌入式系统(例如在发射阶段在卫星中)遇到的外部振动或冲击时,由惯性矩和可移动电枢的旋转刚度形成的机构的机械共振会被激发。这种共振趋于使包括镜子的可移动电枢2振荡,这是不希望的。由于磁体5a,5b,5c,5d,可移动电枢2的振荡振动运动在定子电路中产生通量变化,这导致线圈9a,9b,9c,9d的端子处的电压变化。如果连接了阻尼电路,则这些电压变化会产生电流变化ix和iy,从而使电功率能够通过电阻器r电消散。这种电阻尼会限制可移动电枢2的振荡振动运动。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1