一种光伏组件用机械式无水自动清洁装置的制作方法
[0001]
本发明涉及一种光伏组件用机械式无水自动清洁装置,属于光伏组件表面除尘技术领域。
背景技术:
[0002]
空气中的尘埃会很大限度的限制光伏组件的转换效率,而且会使其逐渐的下降,铅酸蓄电池首次充电保持5~7天,被尘埃覆盖后降为2~3天,最后严重到导致铅酸蓄电池无法充电。而且电能也会由原来的100w,下降到80w或者更低,同时由于树叶,鸟粪等固定覆盖物对光伏组件的遮挡,产生热斑效应,会直接导致其局部的烧毁。如果电站建立在荒漠地带,那人工费和设备的运输搬运费,是非常高额的一笔费用。如果不使用光伏表面的除尘,基本2-4年,光伏组件基本失能。
[0003]
光伏组件的除尘技术主要分为三大类,第一类为人工利用工具对光伏组件的表面进行定期的清洗,现在大部分地区的光伏电站都采用此方法,但是在执行此方法的同时带来了很大的一笔人工费用,第二类为将光伏组件的表面的钢化玻璃用自清洁玻璃代替,对于自清洁玻璃的研究大部分都局限于试验阶段,对于自清洁的玻璃的研究也是基于玻璃表面涂覆二氧化钛或掺杂二氧化钛膜,其研究后最大的问题就是光的透过率和光的折射率,将对光电转换效率直接影响,第三类为机械装置,但是机械在运动的过程中需要依附于移动小车,体型较为庞大,需要大量的水,而且需要人工进行现场操作,制约了其进一步的发展。
[0004]
本发明针对目前机械除尘装置需要人工进行现场操作并消耗大量水资源的问题,设计了一种光伏组件用机械式无水自动清洁装置。
技术实现要素:
[0005]
本发明所要解决的技术问题:针对机械除尘装置需要人工操作并消耗大量水资源的问题,提供了一种光伏组件用机械式无水自动清洁装置。。
[0006]
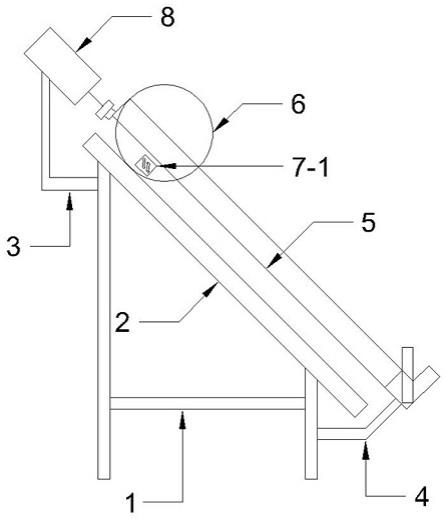
为解决上述技术问题,本发明是通过以下技术方案实现的:一种光伏组件用机械式无水自动清洁装置,由光伏组件支架(1)、光伏组件(2)、传动步进电机支架(3)、传动系统支撑架(4)、传动系统(5)、除灰系统(6)、左凸轮板(7-1)、右凸轮板(7-2)、传动步进电机(8)、左下顶块(30-1)、右下顶块(30-2)、左上顶块(31-1)、右上顶块(31-2)组成。
[0007]
所述的传动系统(5)由同步带(17)、光轴(18)、滚珠丝杆(19)、直线轴承(20)、固定螺母(21)、支撑板(22)、同步带轮(23)组成。其中,同步带(17)通过同步带轮(23)与滚珠丝杆(20)连接,光轴(18)通过固定螺母(21)固定至滚珠丝杆(19)的正下方8~12cm处,直线轴承(20)固定在光轴(18)上,支撑板(22)固定于光轴(18)和滚珠丝杆(19)的底部。
[0008]
所述的除灰系统(6)由除灰步进电机(9)、联轴器(10)、除灰刷固定架(11)、轴承(12)、铲尘板(13)、除尘刷(14)、除灰系统机壳(15)、抹刷(16)组成。其中,除灰步进电机(9)
通过联轴器(10)固定于除灰刷固定架(11)的左侧,通过轴承(12)与除尘刷(14)连接,产尘板(13)位于除灰系统机壳(15)的前下方,除尘刷(14)位于除灰系统机壳(15)的正下方,抹刷(16)位于除灰系统机壳(15)的后下方。
[0009]
所述的光伏组件(2) 其中,超白光伏玻璃(24)与铝合金框架(29)通过玻璃胶密封连接,上eva垫层(25)位于超白光伏玻璃(24)正下方,晶体硅电池片(26)位于上eva垫层(25)和下eva垫层(27)之间,tpt背板(28)位于下eva垫层(27)的正下方,并与铝合金框架(29)接触。
[0010]
所述的除灰系统(6)位于传动系统(5)的上端,与光伏组件(2)之间的距离为0.2~0.4mm。
[0011]
所述的左凸轮板(7-1)、右凸轮板(7-2)分别位于位于除灰系统(6)的左侧和右侧,。
[0012]
所述的传动步进电机(8)的电压为48~72v,其工作能源由光伏组件(2)产生的电能供给。
[0013]
所述的除尘刷(14)的外壁材质为浇注尼龙, 其24h吸水性为0.7%~1.2%、弯曲强度为140~170mpa、弯曲弹性模量为4.0gpa。
[0014]
所述的除灰步进电机(9)的电压为24~48v,其工作能源由光伏组件(2)产生的电能供给。
[0015]
所述的光伏组件用机械式无水自动清洁装置的除尘过程由传动步进电机(8)和除灰步进电机(9)同步完成,首先除灰系统(6)通过传动系统(5)上方的传动步进电机(8)提供动力进行从上至下运动至传动系统(5)的底部,然后通过左下顶块(30-1)、右下顶块(30-2)分别将左凸轮板(7-1)和右凸轮板(7-2)顶住以抬升除灰系统(6),除灰系统(6)在传动步进电机(8)的逆运转下返回至传动系统(5)顶部,通过左上顶块(31-1)、右上顶块(31-2)分别将左凸轮板(7-1)和右凸轮板(7-2)顶住以降下除灰系统(6),使其再次与光伏组件(2)接触;除灰系统(6)内部由除灰步进电机 (9)为除尘刷(14)提供动力使其旋转作用于光伏组件(2)表面,并从光伏组件(2)的表面顶部一直作用于底部,铲尘板(13)位于光伏组件(2)上方0.6~0.8mm处进行铲尘,抹刷(16)与光伏组件(2)表面接触,对表面进行抹擦,在除灰系统(6)抬升稳定后,除灰步进电机(9)停止转动,在除灰系统(6)抬升的过中,滚刷进行自清理,利用铲尘板(13)去除自身粘附的灰尘。
[0016]
本发明与其他技术相比,有益效果在于:本发明设计的光伏组件自动除尘装置采用步进电机作为推进传动装置 ,步进电机的步距值不受不受电压、电流等外界干扰信号的影响,不会形成累计误差,步进电机所转动的理论值和实际值肯定存在一定的误差,前一步和后一步之间的无误差在所难免 。但是步进电机每转动一圈便会将这误差进行自动清零处理,防止对下次的转动的影响,步进电机的可控制性能好,正转反转等可在少数的脉冲信号中完成,并且不会因为干扰等其他原因失步,可以实现装置对光伏组件的精准除灰本发明设计的光伏组件用机械式无水自动清洁装置的除尘过程由传动步进电机和除灰步进电机同步完成,步进电机可控性能较好,有着很好的起停和反转响应,不会因为外界环境干扰而失步。由于步进电机内部结构中不存在电刷,相对于普通电机可靠性较高,其寿命仅仅取决于轴承的寿命。步进电机的步距值不受电流、电压等外界干扰信号的影响,有比
较好的运动重复性及较好的位置精度,并且步进电机只需通过联轴器负载直接连接到电机的转轴上,就可以极低速的同步旋转;整个装置的除尘过程分为两部分,第一个部分分为四个动作,即除灰系统通过传动系统上的传动步进电机提供动力,进行从上至下运动,再次进行除灰系统的抬升,除灰系统的返回,除灰系统再次与光伏组件接触;第二部分为除灰系统的动作,首先由除灰系统的除灰步进电机给除尘刷提供动力使其旋转作用于光伏组件表面,并从光伏组件的表面顶部一直作用于光伏组件的底部,在除灰系统抬升稳定后,除灰步进电机停止转动,在除灰系统抬升的过程中,滚刷进行自清理,利用铲尘板去除滚刷自身粘附的灰尘。本发明设计的装置通过外力来清除光伏组件玻璃表面灰尘,采用自上而下的运动方式,将铲、刷、抹三种方式结合一起,产生的作用力大于灰尘颗粒粘附在光伏组件玻璃表面作用力,可以使灰尘颗粒随着外力在光伏组件玻璃表面运动并最终脱离表面,从而达到无水清除颗粒目的,并且除尘系统返回时,在凸轮板的作用下可以使除尘刷和抹刷的表面脱离光伏组件表面,从而防止灰尘粘在光伏组件表面。
附图说明
[0017]
图1为本装置的整体结构图。
[0018]
图2为除灰系统的结构图。
[0019]
图3为传动系统的结构图。
[0020]
图4为光伏组件爆炸结构图。
[0021]
图5为左凸轮板和右凸轮板示意图。
[0022]
图中:1、光伏组件支架,2、光伏组件,3、传动步进电机支架,4、传动系统支撑架,5、传动系统,6、除灰系统,7-1、左凸轮板,7-2右凸轮板,8、传动步进电机,9、除灰步进电机,10、联轴器,11、除灰刷固定架,12、轴承,13、铲尘板,14、除尘刷,15、除灰系统机壳,16、抹刷,17、同步带,18、光轴,19、滚珠丝杆,20、直线轴承,21、固定螺母,22、支撑板,23、同步带轮,24、超白光伏玻璃,25、上eva垫层,26、晶体硅电池片,27、下eva垫层,28、tpt背板,29、铝合金框架,30-1、左下顶块,30-2、右下顶块,31-1、左上顶块,31-2、右上顶块。
具体实施方式
[0023]
为了使本发明的所要解决的技术问题、技术方案及有益效果更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
[0024]
需说明的是,本发明实施例的附图中相同或相似的标号对应相同或相似的部件;在本发明的描述中,需要理解的是,若有术语“上”、“下”、“左”、“右”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此,附图中描述位置关系的用语仅用于示例性说明,不能理解为对本专利的限制,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语的具体含义。
[0025]
如图1、图2、图3、图4和图5所示,一种光伏组件用机械式无水自动清洁装置,由光伏组件支架、光伏组件、传动步进电机支架、传动系统支撑架、传动系统、除灰系统、左凸轮板、右凸轮板、传动步进电机、左下顶块、右下顶块、左上顶块、右上顶块组成。
[0026]
如图1和图3所示,所述的传动系统由同步带、光轴、滚珠丝杆、直线轴承、固定螺母、支撑板、同步带轮组成,其中,同步带通过同步带轮与滚珠丝杆连接,光轴通过固定螺母固定至滚珠丝杆的正下方8~12cm处,直线轴承固定在光轴上,支撑板固定于光轴和滚珠丝杆的底部。
[0027]
如图2所示,所述的除灰系统由除灰步进电机、联轴器、除灰刷固定架、轴承、铲尘板、除尘刷、除灰系统机壳、抹刷组成,其中,除灰步进电机通过联轴器固定于除灰刷固定架的左侧,通过轴承与除尘刷连接,产尘板位于除灰系统机壳的前下方,除尘刷位于除灰系统机壳的正下方,抹刷位于除灰系统机壳的后下方。
[0028]
如图4所示,所述的光伏组件由超白光伏玻璃、上eva垫层、晶体硅电池片、下eva垫层、tpt背板、铝合金框架组成组成,其中,超白光伏玻璃与铝合金框架通过玻璃胶密封连接,上eva垫层位于超白光伏玻璃正下方,晶体硅电池片位于上eva垫层和下eva垫层之间,tpt背板位于下eva垫层的正下方,并与铝合金框架接触。
[0029]
如图1、图2和图3所示,所述的除灰系统位于传动系统的上端,与光伏组件之间的距离为0.2~0.4mm。所述的左凸轮板、右凸轮板分别位于位于除灰系统的左侧和右侧,所述的传动步进电机的电压48~72v,其工作能源由光伏组件产生的电能供给。所述的除尘刷的外壁材质为浇注尼龙,其24h吸水性为0.7%~1.2%、弯曲强度为140~170mpa、弯曲弹性模量为4.0gpa。所述的除灰步进电机的电压为24~48v,其工作能源由光伏组件产生的电能供给。
[0030]
如图1、图2、图3、图4和图5所示,所述的光伏组件用机械式无水自动清洁装置的除尘过程由传动步进电机和除灰步进电机同步完成,首先除灰系统通过传动系统上方的传动步进电机提供动力进行从上至下运动至传动系统的底部,然后通过左下顶块、右下顶块分别将左凸轮板和右凸轮板顶住以抬升除灰系统,除灰系统在传动步进电机的逆运转下返回至传动系统顶部,通过左上顶块、右上顶块分别将左凸轮板和右凸轮板顶住以降下除灰系统,使其再次与光伏组件接触;除灰系统内部由除灰步进电机为除尘刷提供动力使其旋转作用于光伏组件表面,并从光伏组件的表面顶部一直作用于底部,铲尘板位于光伏组件上方0.6~0.8mm处进行铲尘,抹刷与光伏组件表面接触,对表面进行抹擦,在除灰系统抬升稳定后,除灰步进电机停止转动,在除灰系统抬升的过中,滚刷进行自清理,利用铲尘板去除自身粘附的灰尘。
[0031]
以上所述仅为本发明的优选实施例而已,并不用于限制本发明。对于本领域的技术人员说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的权利要求范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1