一种无轴承无铁心永磁电机悬浮力模型预测控制系统的制作方法
[0001]
本发明属于无轴承电机控制领域,涉及一种多变量、非线性、强耦合的无轴承无铁心永磁电机悬浮力的直接控制技术。
背景技术:
[0002]
无轴承无铁心永磁电机是一种集合了无铁心永磁电机和磁轴承特性的新型电机,它不仅具有效率高、过载能力强、无齿槽转矩、转子损耗低等优点,还具有磁轴承无需润滑、无摩擦和免维护等特点,可实现高速或超高速运行,在化学化工、生命科学、能源交通、航空航天及机器人领域具有应用前景。但由于无轴承无铁心永磁电机本身是多变量、非线性、强耦合的被控对象,使得传统悬浮力控制算法难以满足高精、高速场合的需求,限制了其发展。例如中国专利公开号cn205509912u的文献公开的单绕组无轴承电机转矩和悬浮力直接控制器,通过借鉴永磁电机直接转矩控制的思想和方法,构建了一种基于转子位移和悬浮力双闭环的直接悬浮力控制器,采用定子磁链定向和瞬时空间理论,直接对电机定子磁链和悬浮力控制,但由于其采样及数字计算的延迟,使目标电压矢量总是滞后一个采样周期,造成磁链和悬浮力的脉动变大,控制精度差。中国专利公开号cn110061676a的文献公开一种基于磁链观测器的永磁同步电机控制器,预测下一时刻的磁链、转矩和悬浮力,减小由于系统延迟带来的误差,但由于其仍采用空间矢量调制来合成电压矢量,因此需要在预测过程中对无数个电压矢量进行预测运算,大大增加了运算量。
技术实现要素:
[0003]
本发明的目的是为了解决无轴承无铁心永磁电机悬浮力控制中存在的精度差和运算量大的问题,提出一种新型无轴承无铁心永磁电机悬浮力模型预测控制系统,减小因系统采样和数字计算延迟造成的控制时间的延长,提高悬浮力控制精度。同时采用价值函数计算和优化来选取最优电压矢量驱动逆变器,减小系统预测计算量,提高预测控制系统的实用性。
[0004]
本发明所述的无轴承无铁心永磁电机悬浮力模型预测控制系统采用的技术方案是:其由悬浮力控制部分和转速控制部分组成,悬浮力控制部分包括两个pid控制器以及依次串接的极坐标变换模块、悬浮力计算模块、第一个坐标变换模块、目标函数寻优模块、两电平三相逆变器,第二个坐标变换模块、悬浮绕组磁链预测模块,还包括依次串接的clark变换模块、磁链观测器模块和矢量合成模块,clark变换模块输入的是无轴承无铁心永磁电机转矩绕组的三相电流i
1a
、i
1b
、i
1c
,矢量合成模块输出端连接所述的悬浮力计算模块的输入端,极坐标变换模块输入端分别连接两个pid控制器;无轴承无铁心永磁电机转子的实际位移x、y与给定位移信号x
*
、y
*
分别作差得到的位移差值分别输入对应的两个pid控制器中,两个pid控制器分别输出的径向悬浮力分量f
x
、f
y
共同输入极坐标变换模块中,极坐标变换模块输出径向悬浮力指令值与相位ξ再共同输入悬浮力计算模块中;clark变换模块输出转矩绕组电流分量i
1sα
、i
1sβ
并输入至磁链观测器中,磁链观测器输出的转矩绕组合成气隙
磁链分量ψ
1mα
、ψ
1mβ
输入到矢量合成模块中输出转矩绕组合成气隙磁链ψ
1m
及相位η,转矩绕组合成气隙磁链ψ
1m
及相位η共同输入到悬浮力计算模块中;悬浮力计算模块输出k时刻悬浮绕组磁链指令值和相位经坐标变换模块变换后输出k时刻悬浮绕组磁链指令值分量和无轴承无铁心永磁电机的悬浮绕组三相电压u
2a
,u
2b
,u
2c
和三相电流i
2a
,i
2b
,i
2c
经第二个坐标变换模块输出悬浮绕组电压分量u
2d
,u
2q
以及悬浮绕组电流分量i
2d
,i
2q
,将u
2d
,u
2q
,i
2d
,i
2q
输入至悬浮绕组磁链预测模块中,悬浮绕组磁链预测模块输出k+1时刻悬浮绕组磁链预测值分量ψ
2sα
(k+1)与ψ
2sβ
(k+1),所述的k时刻悬浮绕组磁链指令值分量和分别对应地与所述的悬浮绕组磁链预测值分量ψ
2sα
(k+1)与ψ
2sβ
(k+1)作差得到对应的磁链差值
△
ψ
2sα
和
△
ψ
2sβ
,磁链差值
△
ψ
2sα
和
△
ψ
2sβ
输入到目标函数寻优模块中,目标函数寻优模块输出逆变器开关状态信号s
2a
,s
2b
,s
2c
。
[0005]
所述的转速控制部分包括光电编码器、积分器以及依次串接的第三个pid控制器、气隙磁场定向控制模块、反clark变换模块和电流调节型逆变器,光电编码器检验出无轴承无铁心永磁电机转子的实际转速ω
r
并输入到所述的悬浮绕组磁链预测模块中,实际转速ω
r
与给定转速信号作差后经过第三个pid控制器调制后产生转矩t
e
,转矩t
e
与转矩磁场给定磁链ψ
*
输入气隙磁场定向控制模块中产生转矩绕组电流指令值分量和转差率ω
s
,转矩绕组电流指令值分量输入到反clark变换模块中,转差率ω
s
和实际转速ω
r
求和后输入到积分器,积分器输出转子位置角θ,转子位置角θ分别输入到反clark变换模块以及所述的悬浮绕组磁链预测模块中,反clark变换模块输出转矩绕组电流指令值分量电流调节型逆变器输出转矩绕组三相电流i
1a
,i
1b
,i
1c
。
[0006]
本发明采用上述技术方案后的优点在于:
[0007]
1、本发明无轴承无铁心永磁电机悬浮力模型预测控制系统采用离散数学模型的思想,利用初始观测的转矩绕组磁链,预测出下一个采样周期内的每个开关状态所对应的悬浮力绕组磁链,利用价值函数选取最优开关状态的电压矢量输入到下一个控制周期中,完成悬浮力直接控制,悬浮力的控制与优化同时进行,不仅仅避免了由于延时带来的悬浮力脉动和磁链纹波等问题,还解决了无轴承电机传统悬浮力矢量控制存在的参数整定复杂以及控制过程中动态性能不足的问题。
[0008]
2、本发明在计算无轴承电机悬浮力的基础上,保持电机的负载转矩不变,转矩绕组合成气隙磁链大小和相位及转矩绕组磁链与转子磁链的夹角也保持不变,通过控制悬浮绕组磁链的大小和相位就可以对径向悬浮力进行直接控制,解决了传统悬浮力间接控制带来的精度不够、实时性不足、受电机参数影响较大等问题。
附图说明
[0009]
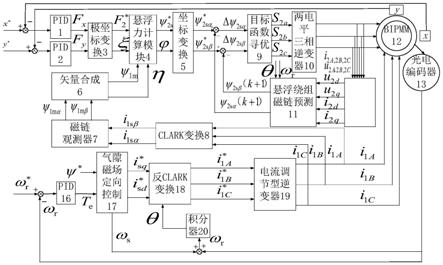
图1是本发明一种无轴承无铁心永磁电机悬浮力模型预测控制系统的结构框图;
[0010]
图2是本发明的直接悬浮力控制矢量原理图;
[0011]
图中:1.第一个pid控制器;2.第二个pid控制器;3.极坐标变换模块;4.悬浮力计算模块;5.第一个坐标变换模块;6.矢量合成模块;7.磁链观测器模块;8.clark变换模块;
9.目标函数寻优模块;10.两电平三相逆变器;11.悬浮绕组磁链预测模块;12.无轴承无铁心永磁电机;13.光电编码器;14.y方向位移传感器;15.x方向位移传感器;16.第三个pid控制器;17.气隙磁场定向控制;18.反clark变换;19.电流调节型逆变器;20.积分器;21.第二个坐标变换模块。
具体实施方式
[0012]
如图1所示,本发明由悬浮力控制部分和转速控制部分组成。
[0013]
悬浮力控制部分:包括两个pid控制器1、2以及依次串接的极坐标变换模块3、悬浮力计算模块4、第一个坐标变换模块5、目标函数寻优模块9、两电平三相逆变器10,第二个坐标变换模块21和悬浮绕组磁链预测模块11,还包括依次串接的clark变换模块8、磁链观测器模块7和矢量合成模块6。其中,clark变换模块8输入的是无轴承无铁心永磁电机12转矩绕组的三相电流i
1a
、i
1b
、i
1c
,矢量合成模块6的输出端连接所述的悬浮力计算模块4的输入端。极坐标变换模块3的输入端分别连接第一个pid控制器1和第二个pid控制器2,两电平三相逆变器10接收来自目标函数寻优模块9输出的逆变器开关状态信号s
2a
,s
2b
,s
2c
,完成无轴承无铁心永磁电机12的悬浮力控制。
[0014]
采用x方向位移传感器15、y方向位移传感器14分别检测无轴承无铁心永磁电机12转子的实际位移x、y,测得的实际位移x、y与给定位移信号x
*
、y
*
分别作差,位移差值分别输入对应的第一个pid控制器1、第二个pid控制器2中,第一个pid控制器1和第二个pid控制器2分别输出径向悬浮力分量f
x
、f
y
,径向悬浮力分量f
x
、f
y
共同输入极坐标变换模块3中,经变换后得到径向悬浮力指令值与相位ξ,径向悬浮力指令值与相位ξ再共同输入悬浮力计算模块4中。
[0015]
同时,无轴承无铁心永磁电机12的转矩绕组三相电流i
1a
、i
1b
、i
1c
输入clark变换模块8中,经坐标变换为转矩绕组电流在α-β坐标系下的电流分量i
1sα
、i
1sβ
,电流分量i
1sα
、i
1sβ
输入至磁链观测器7中,磁链观测器7输出转矩绕组合成气隙磁链在α-β坐标系下的磁链分量ψ
1mα
、ψ
1mβ
,该磁链分量ψ
1mα
、ψ
1mβ
输入到矢量合成模块6中,经过矢量合成,得到转矩绕组合成气隙磁链ψ
1m
及相位η,转矩绕组合成气隙磁链ψ
1m
及相位η共同输入到悬浮力计算模块4中。
[0016]
悬浮力计算模块4对输入的径向悬浮力指令值与相位ξ、转矩绕组合成气隙磁链ψ
1m
及相位η作计算,得到k时刻悬浮绕组磁链指令值和相位k时刻的悬浮绕组磁链指令值和相位输入第一个坐标变换模块5中,经坐标变换后得到k时刻悬浮绕组磁链指令值在α-β坐标系下的磁链指令值分量和
[0017]
同时,无轴承无铁心永磁电机12的悬浮绕组三相电压u
2a
,u
2b
,u
2c
和三相电流i
2a
,i
2b
,i
2c
输入第二个坐标变换模块21中,经过调制得到悬浮绕组电压在d-q坐标系下的悬浮绕组电压分量u
2d
,u
2q
以及悬浮绕组电流在d-q坐标系下的悬浮绕组电流分量i
2d
,i
2q
,将u
2d
,u
2q
,i
2d
,i
2q
输入至悬浮绕组磁链预测模块11中,同时,转速控制部分中的积分器模块20输出的转子位置角θ也输入至悬浮绕组磁链预测模块11中,光电编码器13检测出的实际转速ω
r
也输入至悬浮绕组磁链预测模块11中,悬浮绕组磁链预测模块11得到k+1时刻悬浮绕组磁
链预测值在α-β坐标系下的悬浮绕组磁链预测值分量ψ
2sα
(k+1)与ψ
2sβ
(k+1)。将第一个坐标变换模块5输出的k时刻悬浮绕组磁链指令值分量和分别对应地与悬浮绕组磁链预测模块11输出的悬浮绕组磁链预测值分量ψ
2sα
(k+1)与ψ
2sβ
(k+1)分别对应地一一比较作差,得到对应的磁链差值
△
ψ
2sα
和
△
ψ
2sβ
。将磁链差值
△
ψ
2sα
和
△
ψ
2sβ
输入到目标函数寻优模块9中,目标函数寻优模块9得到最优的电压矢量s
2a
,s
2b
,s
2c
,即逆变器开关状态信号s
2a
,s
2b
,s
2c
,最优电压矢量s
2a
,s
2b
,s
2c
输入两电平三相逆变器10中,对无轴承无铁心永磁电机12实现悬浮力的直接控制。
[0018]
转速控制部分:包括光电编码器13、积分器20以及依次串接的第三个pid控制器16、气隙磁场定向控制模块17、反clark变换模块18和电流调节型逆变器19。采用光电编码器13检验出无轴承无铁心永磁电机12转子的实际转速ω
r
,该实际转速ω
r
输入到所述的悬浮绕组磁链预测模块11中,同时将实际转速ω
r
与给定转速信号作差,两者的差值经过第三个pid控制器16调制后产生转矩t
e
,将转矩t
e
与转矩磁场给定磁链ψ
*
一起输入气隙磁场定向控制模块17中,产生转矩绕组电流指令值在d-q坐标系下的转矩绕组电流指令值分量和转差率ω
s
。转矩绕组电流指令值分量输入到反clark变换模块18中。将转差率ω
s
和实际转速ω
r
求和后输入到积分器20,积分器20对求和值进行积分运算,输出转子位置角θ,将转子位置角θ分别输入到反clark变换模块18中以及所述的悬浮绕组磁链预测模块11中。反clark变换模块18对转矩绕组电流指令值分量和转子位置角θ进行处理,经坐标变换后得到转矩绕组电流指令值在三相坐标下的转矩绕组电流指令值分量转矩绕组电流指令值分量输入到电流调节型逆变器19中,电流调节型逆变器19输出转矩绕组三相电流i
1a
,i
1b
,i
1c
,控制无轴承无铁心永磁电机12,得到电机的转速控制部分。
[0019]
参见图2所示的直接悬浮力控制矢量原理图,图2中,ψ
1mα
和ψ
1mβ
为ψ
1m
在α-β坐标系下的分量,其矢量合成为ψ
1m
,ψ
1m
为转矩绕组合成气隙磁链,其相位为η;为k时刻悬浮绕组磁链指令值,其相位为磁链指令值,其相位为为径向悬浮力指令值,其相位为由此可以得出用于计算各个参数的数学关系式。
[0020]
极坐标变换模块3对输入的悬浮力分量f
x
和f
y
经计算得到径向悬浮力指令值及其相位ξ:
[0021][0022]
悬浮力计算模块4对输入的径向悬浮力指令值及其相位ξ、转矩绕组合成气隙磁链幅值ψ
1m
及相位η进行计算:
[0023][0024]
式中,p
m
和p
b
分别为转矩绕组和悬浮绕组的极对数,μ0为真空磁导率,r和l分别为电机转子外径与铁芯的有效长度,n
t
和n
s
分别为转矩绕组和悬浮绕组的有效匝数,ψ
1m
为转矩绕组合成气隙磁链,ψ
2s*
为k时刻悬浮绕组磁链指令值。
[0025]
矢量合成模块6对输入的转矩绕组合成气隙磁链分量ψ
1mα
与ψ
1mβ
进行计算,得到转矩绕组合成气隙磁链ψ
1m
与相位η:
[0026][0027][0028]
悬浮绕组磁链预测模块11对输入其中的悬浮绕组电压分量u
2d
,u
2q
、悬浮绕组电流分量i
2d
,i
2q
,转子位置角θ、实际转速ω
r
作磁链预测运算,运算过程如下:
[0029]
根据悬浮绕组电压方程通过选取悬浮绕组磁链作为状态变量,可得悬浮绕组磁链预测模型ψ
2s,dq
(k+1)=(i-dt
s
)ψ
2s,dq
+t
s
u
2,dq
,则在k+1时刻悬浮绕组磁链预测值|ψ
2s
(k+1)|和相位λ
k+1
可表示为进一步得到,其中,u
2d
,u
2q
为悬浮绕组电压在d-q坐标系下的分量,i
2d
,i
2q
为悬浮绕组电流d-q坐标系下的,p为微分算子,ψ
2sd
、ψ
2sq
为k时刻悬浮绕组气隙磁链在d-q坐标系的分量,l
2d
、l
2q
为悬浮绕组交直轴电感,r
2s
为悬浮绕组电阻,ω
r
为转子的实际转速,t
s
为一个采样周期时间,θ为转子位置角,i为单位矩阵,
[0030]
第一个坐标变换模块5输出的k时刻悬浮绕组磁链指令值分量ψ
*2sα
、ψ
*2sβ
与悬浮绕组磁链预测模块11输出的k+1时刻悬浮绕组磁链预测值分量与分别对应地作差磁链差值δψ
2sα
、δψ
2sβ
:
[0031]
在保持转矩绕组合成气隙磁链不变的情况下,控制悬浮绕组磁链来控制悬浮力,因此构造如下目标函数寻优模块9:
[0032]
g
i
=|
△
ψ
2sα
|+|
△
ψ
2sβ
|,
[0033]
式中,i是0~7,有8个函数值g0~g7,对应于8种开关状态,
△
ψ
2sα
和
△
ψ
2sβ
为输入目标函数寻优模块9的磁链差值。
[0034]
两电平三相逆变器有8种开关状态对应着8种电压矢量。在一个采样周期内,将8个电压矢量对应的磁链差值
△
ψ
2sα
和
△
ψ
2sβ
输入到目标函数寻优模块9,产生8个函数值g0~g7,选取最小价值函数值g并产生与之相对应的逆变器开关状态s
2a
,s
2b
,s
2c
输入两电平三相逆变器10,完成无轴承无铁心永磁电机12的悬浮力控制。
[0035]
气隙磁场定向控制模块17对输入其中的转矩t
e
与转矩磁场给定磁链ψ
*
作处理,得到转矩绕组电流指令值分量和转差率ω
s
。采用光电编码器13检验出无轴承无铁心永磁电机12转子的实际转速ω
r
,转子的实际转速ω
r
输入至第二个坐标变换模块21并与给定转速信号作差,两者的差值经过第三个pid控制器16调制后产生转矩t
e
,将转矩t
e
与转矩磁场给定磁链ψ
*
一起输入气隙磁场定向控制模块17中,转矩绕组电流指令值分量一起输入气隙磁场定向控制模块17中,转矩绕组电流指令值分量和转差率ω
s
。所述的气隙磁场定向控制模块17公式为:
[0036]
ω
s
=ω
m-ω
r
,
[0037][0038]
式中,t
e
为转矩,ψ
*
为转矩磁场给定磁链,p
m
为转矩绕组极对数,p为微分算子,ω
m
为转矩绕组角频率,ω
r
为转子的实际转速,为转子时间系数,r
r
为转子电阻,l
r
为转子电感,l
rl
为转矩绕组转子漏感,l
m
为转矩绕组定转子互感。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1