基于云伸缩因子的变论域云PI负荷频率控制方法与流程
基于云伸缩因子的变论域云pi负荷频率控制方法
技术领域
[0001]
本发明属于电力系统的负荷频率控制领域。
背景技术:
[0002]
电力系统朝着大型化、互联化的方向发展,且鉴于环境保护和资源利用的迫切性,新能源在电力系统中的比例不断提高。大规模新能源通过电力电子接口接入电力系统后,其出力不确定性使系统非线性增强,易使系统有功功率出现不平衡,系统频率稳定受到影响,进而威胁系统稳定运行。负荷频率控制(load frequency control,lfc)作为自动发电控制(automatic generation control,agc)的核心单元,在维持系统频率稳定方面扮演着重要角色。
[0003]
传统负荷频率控制多采用pi/pid控制,但基于线性控制理论的pi/pid控制器越来越难以满足具有强烈非线性特征的新型互联电力系统的控制要求。云模型是具有实现定性概念与定量数据相互转化能力的双向认知模型。云模型同时考虑了语言概念的模糊性和隶属函数的随机性,在处理不确定性问题上具有优势。云模型被应用于负荷频率控制领域(蔡国伟,张斌,王建元,等.云模型理论在互联电力系统负荷频率控制中的应用[j].中国电机工程学报,2015,35(002):353-358.),但该云模型控制器由于输入、输出论域固定,自适应能力有限,高比例新能源接入后,系统不确定性增强,固定的论域会导致控制品质下降,论域调整十分必要。但满足高比例新能源接入情况下的论域调整需求,依然十分困难。
技术实现要素:
[0004]
本发明提出一种基于云(模型)伸缩因子的变论域云(模型)pi负荷频率控制方法,该方法适用于互联电力系统的负荷频率控制,具有良好的自适应性。本发明将云模型控制与经典pi控制相结合,为满足高比例新能源接入情况下的云模型负荷频率控制器的论域调整需求,基于云模型设计输入伸缩因子控制器和输出伸缩因子控制器,即云(模型)伸缩因子。
[0005]
实现本发明目的的技术方案是:基于云伸缩因子的变论域云pi负荷频率控制方法,包括以下步骤:
[0006]
步骤1:建立基于云模型的输入伸缩因子控制器、输出伸缩因子控制器、比例系数整定值控制器、积分系数整定值控制器。
[0007]
步骤101:对误差e,输入伸缩因子α、输出伸缩因子β、比例系数整定值δk
p
、积分系数整定值δk
i
进行云集合划分,并分别以云模型的三个数字特征(期望ex、熵en、超熵he)进行表示;
[0008]
步骤102:建立e到α、e到β、e到δk
p
、e到δk
i
的云映射,即云推理规则;一个单条件单规则云发生器由一个一维x条件云发生器和一个一维y条件云发生器组成。
[0009]
步骤2:确定pi控制器的初始比例系数k
p0
和积分系数k
i0
。
[0010]
步骤3:误差采样
[0011]
以区域控制偏差ace=δp
tie
+b
·
δf作为t时刻的误差信号e,其中δp
tie
为联络线功率偏差,δf为区域频率偏差,b为频率偏置常数。
[0012]
步骤4:误差归一化
[0013]
将e从实际论域[-e,e]映射到归一化论域[-1,1]得到e',其中e'=e/e。
[0014]
步骤5:通过云模型控制器获得变论域伸缩因子(包括输入伸缩因子、输出伸缩因子)
[0015]
将归一化后的误差e'作为云输入伸缩因子控制器和云输出伸缩因子控制器的输入,输出为输入伸缩因子α和输出伸缩因子β。
[0016]
步骤6:通过云模型控制器获得pi控制器参数整定值(包括比例系数整定值、积分系数整定值)
[0017]
步骤601:将归一化后的误差e'乘以输入伸缩因子的倒数得到论域变换后的误差值e*,即e*=e'/α;
[0018]
步骤602:将e*作为云比例系数整定值控制器和云积分系数整定值控制器的输入,输出为比例系数整定值δk
p
'和积分系数整定值δk
i
'。
[0019]
步骤603:将δk
p
'从归一化论域[-1,1]映射到实际论域[-δp,δp]得到δk
p
,其中δk
p
=δk
p
'
·
(β
·
δp);同理,将δk
i
'从归一化论域[-1,1]映射到实际论域[-δi,δi]得到δk
i
,其中δk
i
=δk
i
'
·
(β
·
δi);
[0020]
步骤7:获得t时刻pi控制器的控制输出量
[0021]
t时刻pi控制参数为t-1时刻的pi控制参数加上t时刻pi控制参数整定值,即k
p
=k
p,t-1
+δk
p,t
,k
i
=k
i,t-1
+δk
i,t
;t时刻pi控制器的控制输出量δu=k
p
·
e+k
i
·
∫edt。
[0022]
步骤8:重复步骤3至7,实现基于云(模型)伸缩因子的变论域云(模型)pi负荷频率控制。
[0023]
与现有技术相比,本发明的有益效果是:1)本发明将变论域云模型控制与经典pi控制相结合,针对高比例新能源接入互联电力系统后,论域固定的云模型负荷频率控制器自适应能力有限,控制品质下降,变论域云pi负荷频率控制器可实现输入、输出论域的动态调整,自适应能力增强;2)变论域策略实现了云集合和云规则的动态变化,制定的云规则仅要求反应大致的控制规律,降低了控制器的设计难度;3)为满足高比例新能源接入互联电力系统后的论域调整需求,基于云模型设计输入、输出伸缩因子,云伸缩因子满足高比例新能源接入互联电力系统后复杂的论域调整需求;4)采用云伸缩因子的变论域策略与函数型伸缩因子相比,避免了构造特定形式的函数,降低了参数设置的难度,提高了变论域环节的通用性。
[0024]
下面结合附图和具体实施方式对本发明作进一步详细说明。
附图说明
[0025]
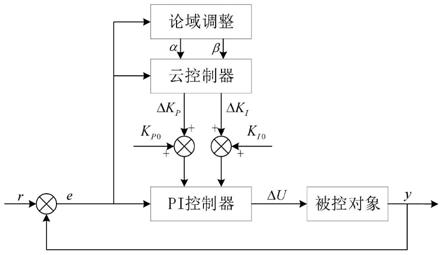
图1是本发明基于云伸缩因子的变论域云pi负荷频率控制器的总体结构示意图;
[0026]
图2是基于云模型的输入伸缩因子控制器的结构示意图;
[0027]
图3是基于云模型的输出伸缩因子控制器的结构示意图;
[0028]
图4是两区域互联电力系统负荷频率控制模型示意图;
[0029]
图5(a)是0.015pu新能源扰动下变论域云pi和云pi控制器对于区域1的频率偏差
的响应曲线对比图;
[0030]
图5(b)是0.015pu新能源扰动下变论域云pi和云pi控制器对于区域2的频率偏差的响应曲线对比图;
[0031]
图5(c)是0.015pu新能源扰动下变论域云pi和云pi控制器对于区域1和区域2之间的联络线功率偏差的响应曲线对比图;
[0032]
图6(a)是0.05pu新能源扰动下变论域云pi和云pi控制器对于区域1的频率偏差的响应曲线对比图;
[0033]
图6(b)是0.05pu新能源扰动下变论域云pi和云pi控制器对于区域2的频率偏差的响应曲线对比图;
[0034]
图6(c)是0.05pu新能源扰动下变论域云pi和云pi控制器对于区域1和区域2之间的联络线功率偏差的响应曲线对比图;
[0035]
图7(a)是0.1pu新能源扰动下变论域云pi和云pi控制器对于区域1的频率偏差的响应曲线对比图;
[0036]
图7(b)是0.1pu新能源扰动下变论域云pi和云pi控制器对于区域2的频率偏差的响应曲线对比图;
[0037]
图7(c)是0.1pu新能源扰动下变论域云pi和云pi控制器对于区域1和区域2之间的联络线功率偏差的响应曲线对比图;
[0038]
图8是变论域原理示意图。
具体实施方式
[0039]
下面结合实施例及附图进一步解释本发明,但并不以此作为对本申请保护范围的限定。
[0040]
本发明基于云伸缩因子的变论域云pi负荷频率控制方法,包括以下内容:
[0041]
对误差e,输入伸缩因子α、输出伸缩因子β、比例系数整定值δk
p
、积分系数整定值δk
i
进行云集合划分,并分别以云模型的三个数字特征进行表示,建立e到α、e到β、e到δk
p
、e到δk
i
的云映射,获得基于云模型的输入伸缩因子控制器、基于云模型的输出伸缩因子控制器、基于云模型的比例系数整定值控制器、基于云模型的积分系数整定值控制器;
[0042]
获取区域互联电力系统中的区域控制偏差作为t时刻的误差e,同时确定系统中pi控制器的初始比例系数和积分系数,
[0043]
将误差e归一化后作为基于云模型的输入伸缩因子控制器和基于云模型的输出伸缩因子控制器的输入,输出为输入伸缩因子α和输出伸缩因子β;再将误差e归一化后的值乘以所输出的输入伸缩因子的倒数得到论域变换后的误差值e*;
[0044]
将e*作为基于云模型的比例系数整定值控制器和基于云模型的积分系数整定值控制器的输入,输出为比例系数整定值δk
p
'和积分系数整定值δk
i
';
[0045]
再将上述所输出的比例系数整定值δk
p
'和积分系数整定值δk
i
'从归一化论域[-1,1]映射到实际论域得到相应的参数整定值;以该参数整定值确定下一时刻pi控制器的控制输出量。
[0046]
本发明中高比例新能源接入情况尤其是指新能源扰动量范围在0.015-0.1pu之间,pu为标幺值。
[0047]
实施例
[0048]
本实施例基于云伸缩因子的变论域云pi负荷频率控制方法,控制器总体结构如图1所示,包括以下步骤:
[0049]
步骤1:建立基于云模型的输入伸缩因子控制器、输出伸缩因子控制器、比例系数整定值控制器、积分系数整定值控制器,其中,基于云模型的输入伸缩因子控制器和基于云模型的输出伸缩因子控制器用于论域调整环节,基于云模型的比例系数整定值控制器和基于云模型的积分系数整定值控制器用于输出pi控制器的参数整定值,基于云模型的输入伸缩因子控制器和基于云模型的输出伸缩因子控制器的结构相同,仅内部参数(数字特征)及输出量不同,分别如图2和3所示。以其中一个为例,图2中,基于云模型的输入伸缩因子控制器包括x条件云发生器和y条件云发生器,x条件云发生器中包括与误差e所划分的云集合数量一致的多个x条件正向云,y条件云发生器中包括与误差e所划分的云集合数量一致的多个y条件正向云(y条件云发生器中包括与误差e所划分的云集合数量(e到α的云推理规则数量)一致的多个y条件正向云),x条件正向云按照云推理规则连接相应的y条件正向云,并最后以加权平均值形式输出输入伸缩因子α的值。基于云模型的输出伸缩因子控制器中y条件云发生器中包括与误差e所划分的云集合数量(e到α的云推理规则数量)一致的多个y条件正向云。
[0050]
步骤101:对误差e,输入伸缩因子α、输出伸缩因子β、比例系数整定值δk
p
、积分系数整定值δk
i
进行云集合划分,并分别以云模型的三个数字特征(期望ex、熵en、超熵he)进行表示:
[0051]
将误差e划分为五个集合:nb(负大)、ns(负小)、ze(零)、ps(正小)、pb(正大),分别用云模型的三个数字特征表示为:(-0.5,0.15,0.005)、(-0.25,0.15,0.005)、(0,0.15,0.005)、(0.25,0.15,0.005)、(0.5,0.15,0.005);
[0052]
将输入伸缩因子α划分为三个集合:s(小)、m(中)、b(大),分别用云模型的三个数字特征表示为:(0.2,0.15,0.005)、(0.6,0.15,0.005)、(1,0.15,0.005);
[0053]
将输出伸缩因子β划分为三个集合:s(小)、m(中)、b(大),分别用云模型的三个数字特征表示为:(0.5,0.15,0.005)、(0.75,0.15,0.005)、(1,0.15,0.005);
[0054]
将比例系数整定值δk
p
划分为五个集合:nb(负大)、ns(负小)、ze(零)、ps(正小)、pb(正大),分别用云模型的三个数字特征表示为:(-0.5,0.15,0.005)、(-0.25,0.15,0.005)、(0,0.15,0.005)、(0.25,0.15,0.005)、(0.5,0.15,0.005);
[0055]
将积分系数整定值δk
i
划分为五个集合:nb(负大)、ns(负小)、ze(零)、ps(正小)、pb(正大),分别用云模型的三个数字特征表示为:(-0.5,0.15,0.005)、(-0.25,0.15,0.005)、(0,0.15,0.005)、(0.25,0.15,0.005)、(0.5,0.15,0.005)。
[0056]
步骤102:建立e到α、e到β、e到δk
p
、e到δk
i
的云映射,即云推理规则;一个单条件单规则云发生器由一个一维x条件云发生器和一个一维y条件云发生器组成。
[0057]
e到α的云推理规则有五条,分别为:
[0058]
1)if e=nb thenα=b,即如果误差e属于集合nb,则输入伸缩因子α属于集合b;
[0059]
2)if e=ns thenα=m
[0060]
3)if e=ze thenα=s
[0061]
4)if e=ps thenα=m
[0062]
5)if e=pb thenα=b
[0063]
e到β的云推理规则有五条,分别为:
[0064]
1)if e=nb thenβ=b
[0065]
2)if e=ns thenβ=m
[0066]
3)if e=ze thenβ=s
[0067]
4)if e=ps thenβ=m
[0068]
5)if e=pb thenβ=b
[0069]
e到δk
p
的云推理规则有五条,分别为:
[0070]
1)if e=nb thenδk
p
=pb
[0071]
2)if e=ns thenδk
p
=ps
[0072]
3)if e=ze thenδk
p
=ze
[0073]
4)if e=ps thenδk
p
=ns
[0074]
5)if e=pb thenδk
p
=nb
[0075]
e到δk
i
的云推理规则有五条,分别为:
[0076]
1)if e=nb thenδk
i
=nb
[0077]
2)if e=ns thenδk
i
=ns
[0078]
3)if e=ze thenδk
i
=ze
[0079]
4)if e=ps thenδk
i
=ps
[0080]
5)if e=pb thenδk
i
=pb
[0081]
以由e得到α为例,说明基于云模型的控制器的工作流程:
[0082]
1)以e为x条件云发生器的输入,对于e的集合nb(ex,en,he),以en为期望,he2为方差生成正态随机数en'=r
n
(en,he),通过x条件正向云cg
nb
计算e对nb的确定度μ(e)=exp[-(e-ex)2/2en'2],记为μ1;
[0083]
2)按照云规则进行云推理,即if e=nb thenα=b;
[0084]
3)以μ(e)为y条件云发生器的输入,对于α的集合nb(ex,en,he),以en为期望,he2为方差生成正态随机数en'=r
n
(en,he),通过y条件正向云cg
b
计算输出一个确定度为μ(e)的云滴drop(x
nb
,μ(e)),即x
nb
=ex
±
sqrt(-2log(μ(e)
·
en'),记为x1;
[0085]
4)对e的集合ns、ze、ps、pb分别进行上述过程,计算得到x
ns
、x
ze
、x
ps
、x
pb
,分别记为x2、x3、x4、x5;
[0086]
5)输出的输入伸缩因子α为上述x
i
的加权平均值,即α=σμ
i
x
i
/σμ
i
。其中μ
i
为云滴x
i
的确定度,其中i=1-5。
[0087]
步骤2:确定pi控制器的初始比例系数k
p0
和初始积分系数k
i0
。
[0088]
步骤3:误差采样
[0089]
给定新能源扰动,再以区域控制偏差ace=δp
tie
+b
·
δf作为t时刻的误差信号e,其中δp
tie
为联络线功率偏差,δf为区域频率偏差,b为频率偏置常数。
[0090]
步骤4:误差归一化
[0091]
将e从实际论域[-e,e]映射到归一化论域[-1,1]得到e',其中e'=e/e。
[0092]
步骤5:通过基于云模型的输入伸缩因子控制器和输出伸缩因子控制器获得变论域伸缩因子(包括输入伸缩因子、输出伸缩因子)
[0093]
将归一化后的误差e'作为基于云模型的输入伸缩因子控制器和基于云模型的输出伸缩因子控制器的输入,分别输出输入伸缩因子α和输出伸缩因子β。
[0094]
步骤6:通过基于云模型的比例系数整定值控制器、基于云模型的积分系数整定值控制器获得pi控制器参数整定值(包括比例系数整定值、积分系数整定值)
[0095]
步骤601:将归一化后的误差e'乘以步骤5输出的输入伸缩因子的倒数得到论域变换后的误差值e*,即e*=e'/α;
[0096]
步骤602:将e*作为基于云模型的比例系数整定值控制器和基于云模型的积分系数整定值控制器的输入,输出为比例系数整定值δk
p
'和积分系数整定值δk
i
';
[0097]
步骤603:将δk
p
'从归一化论域[-1,1]映射到实际论域[-δp,δp]得到δk
p
,其中δk
p
=δk
p
'
·
(β
·
δp);同理,将δk
i
'从归一化论域[-1,1]映射到实际论域[-δi,δi]得到δk
i
,其中δk
i
=δk
i
'
·
(β
·
δi)。
[0098]
步骤7:获得t时刻pi控制器的控制输出量
[0099]
t时刻pi控制参数为t-1时刻的pi控制参数加上t时刻pi控制器参数整定值,即k
p
=k
p
,t-1+δk
p,t
,k
i
=k
i
,t-1+δk
i,t
;t时刻pi控制器的控制输出量δu=k
p
·
e+k
i
·
∫edt,输出量控制被控对象动作。
[0100]
pi控制器的输入是ace信号,输出是δu,作用到调速器中,再给出输出到原动机,电力系统输出频率,图4中δpl1、δpl2为扰动。
[0101]
步骤8:重复步骤3至7,使被控对象给出的反馈信号y接近设定的额定参考值r(可设定为50hz),使控制无偏差,实现基于云(模型)伸缩因子的变论域云(模型)pi负荷频率控制。
[0102]
仿真实验
[0103]
对如图4所示的两区域互联电力系统进行仿真实验,新能源以负负荷形式接入系统,进行不同比例新能源接入情况的扰动实验:图5(a)-图5(c)为0.015pu新能源扰动下变论域云pi和云pi控制器的响应曲线对比,图6(a)-图6(c)为0.05pu新能源扰动下变论域云pi和云pi控制器的响应曲线对比,图7(a)-图7(c)为0.1pu新能源扰动下变论域云pi和云pi控制器的响应曲线对比。从三种情况的对比结果可以看出,相较于采用云pi负荷频率控制器,采用基于云伸缩因子的变论域云pi负荷频率控制器,无论是区域频率偏差还是联络线功率偏差,控制效果均有所提升;图7(a)-图7(c)为0.1pu新能源扰动下变论域云pi和云pi控制器的响应曲线对比,在如此高比例新能源扰动下,基于云伸缩因子的变论域云pi负荷频率控制方法体现出明显优势,如图7(a)的区域1的频率偏差响应曲线所示,采用变论域云pi控制器的调节时间远小于云pi控制器,超调量也明显小于云pi控制器。在高比例新能源扰动下,采用基于云伸缩因子的变论域云pi控制较云pi控制有更好的控制表现,能够使系统频率快速恢复到稳定值,且有效限制了联络线交换功率,基于云模型设计的变论域云伸缩因子很好地满足了高比例新能源接入互联电力系统后复杂的论域调整需求。图8是变论域原理示意图。
[0104]
实验和以上理论分析表明,本发明基于云伸缩因子的变论域云pi负荷频率控制方法可以有效实现互联电力系统的负荷频率控制,尤其是对于高比例新能源接入的互联电力系统,控制效果显著,基于云伸缩因子的变论域策略实现了云控制器的论域动态调整,提升了云控制器的自适应能力。
[0105]
本发明未尽事宜为公知技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1