一种车载自动追光发电装置及其工作方法与流程
[0001]
本发明属于太阳能发电技术领域,具体涉及一种车载自动追光发电装置及其工作方法。
背景技术:
[0002]
光伏发电系统根据太阳能电池板安装支架是否能够跟随太阳的位置变化而变化分成很多类型,如水平固定式、最佳倾角固定式、平单轴跟踪式、斜单轴跟踪式、固定可调式、双轴跟踪式。其中水平固定式就是将太阳能电池板水平固定放置,此种方式发电量最小;双轴跟踪式即太阳能电池板在其安装支架的作用下能够实时跟踪太阳的位置,从而使发电量最大。通过大量的统计可以得出在相同环境下,双轴跟踪发电量比水平固定式发电量提升了80%。市场现有的集成光伏发电功能的汽车都采用的是固定式发电装置,即太阳能电池板相对于汽车车身是固定不动的,譬如日本丰田汽车、韩国现代汽车以及德国索诺汽车三家汽车制造商都在他们的电动汽车上首次安装了太阳能电池板,以增加额外的电能,因此这些发电系统都可以简单理解成水平固定式。
[0003]
据现代汽车透露,若纯粹使用太阳能电池版充电,且每天充电6小时,车辆获得的能量将足以供其行驶1300公里/年,若改为双轴跟踪发电系统那么在相同条件下车辆获得的能量将足以提供其行驶2340公里/年,提升效果非常可观,经济效益和环保效益明显提升。
[0004]
另一方面,随着材料化学的持续发展,太阳能电池材料的太阳能转化率也持续升高,如多晶硅电池转化率17-19%,单晶硅电池转化率在19-25%,薄膜太阳能电池转化率8-30%,所以随着时间推移,未来人类一定会在太阳能电池转化率上有质的提升,因此车载自动追光发电装置的应用前景必将更加广阔。
技术实现要素:
[0005]
本发明的目的在于提供一种车载自动追光发电装置及其工作方法。
[0006]
本发明一种车载自动追光发电装置,包括第一顶升件、第二顶升件、第三顶升件、横向导轨、纵向导轨和追光板。第一顶升件、第二顶升件及第三顶升件均安装在车辆的顶部。横向导轨和纵向导轨均固定在追光板的底面。横向导轨及纵向导轨上均滑动连接有滑块。第一顶升件的顶部与追光板的底面构成球面副;第二球铰座的顶部与横向导轨上的滑块构成球面副;第三球铰座的顶部与纵向导轨上的滑块构成球面副。
[0007]
作为优选,在追光板水平的情况下,第一顶升件与第二顶升件的排列方向垂直于纵向导轨的长度方向。
[0008]
作为优选,在追光板水平的情况下,第三顶升件顶部的升降块在特征竖直面的投影到第一顶升件与第二顶升件顶部的升降块在特征竖直面的投影的距离相等。特征竖直面为一个平行于横向导轨轴线的平面。
[0009]
作为优选,在车辆行驶中,根据导航信息判断车辆的当前位置和朝向;根据当前时
间和车辆的当前位置判断太阳相对于车辆的水平角和俯仰角;之后通过第一顶升件、第二顶升件及第三顶升件的升降控制追光板朝向太阳。
[0010]
作为优选,所述追光板的顶面上固定有太阳能电池板。
[0011]
作为优选,所述的第一顶升件、第二顶升件及第三顶升件均安装在车辆引擎盖、车顶或后备箱上的凹槽内;第一顶升件、第二顶升件及第三顶升件均降至最低位置时,追光板与车辆的轮廓平齐。
[0012]
作为优选,所述的第一顶升件、第二顶升件及第三顶升件均采用剪式千斤顶结构。
[0013]
该车载自动追光发电装置的工作方法,包括朝向调节方法和扫描追光方法具体如下:
[0014]
朝向调节方法具体如下:
[0015]
以纵向导轨轴线方向为x轴方向,以横向导轨轴线方向为y轴方向。若要使追光板绕x轴旋转,则第一顶升件与第二顶升件中的其中一个抬升,另一个降低。若要使追光板绕y轴旋转,则第一顶升件、第二顶升件同步抬升,且第三顶升件降低。
[0016]
扫描追光方法具体如下:
[0017]
步骤一、通过朝向调节方法控制追光板绕x轴正转一个预设夹角;若该转动过程中发电功率增大,则控制追光板绕x轴持续正转;若该转动过程中发电功率减小,则控制追光板绕x轴持续反转;
[0018]
追光板绕x轴持续正转或持续反转的过程中,当追光板的发光功率由大减小时,追光板停止转动;
[0019]
步骤二、通过朝向调节方法控制追光板绕y轴正转一个预设夹角;若该转动过程中发电功率增大,则控制追光板绕y轴持续正转;若该转动过程中发电功率减小,则控制追光板绕y轴持续反转;
[0020]
追光板绕y轴持续正转或持续反转的过程中,当追光板的发光功率由大减小时,追光板停止转动。
[0021]
作为优选,扫描追光方法的步骤二执行结束后,第一顶升件、第二顶升件、第三顶升件同步下降,直到任意一个顶升件下降到下极限位置。
[0022]
作为优选,所述的扫描追光方法在车载自动追光发电装置启动时,汽车位置的变化量达到预设量时,距离上一次调整太阳能电池板朝向的时长达到调整周期时启动。
[0023]
作为优选,当汽车车速超过阈值时,将第一顶升件、第二顶升件、第三顶升件均降低到最低位置。
[0024]
本发明具有的有益效果是:
[0025]
1、传统双轴跟踪系统踪方向包括水平回转和竖直俯仰两个方向,实现双自由度跟踪,但是实现两个方向跟踪的执行机构都是上下结构,占用空间大,很难移植到汽车上使用。本发明通过等高设置的三个剪式千斤顶结构的顶升件来调节太阳能电池板的朝向,占用空间小,易于在汽车上使用。
[0026]
2、本发明通过绕x轴、y轴扫描与实时发电功率检测相配合的方式,不借助光学传感器的情况下实现自动追光,大大提高发电效率,并显著降低了追光式太阳能发电设备的成本。
[0027]
3、本发明在角度调节到位后,将追光板保持角度下降到最低位置,从而减少汽车
行驶中的气流对车载自动追光发电装置的冲击弯矩,起到保护车载自动追光发电装置的作用。
[0028]
4、传统双轴跟踪系统踪由于其执行机构采用上下结构,所以为了增加其抗风能力,靠下方的支撑立柱以及减速机都要选用相对大一点的型号,因此即浪费材料增加成本,又很难达到很大的结构稳定性。本发明采用的三个顶升件控制太阳能电池板的位置结构,本身就克服了传统双轴跟踪系统的结构缺陷,因此抗风能力强,非常适合在行驶的车辆上安装使用。
附图说明
[0029]
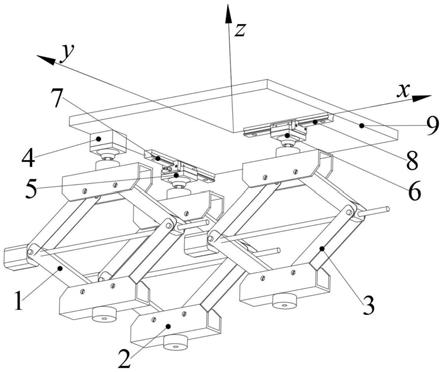
图1为本发明的整体结构示意图;
[0030]
图2为本发明的正面示意图。
具体实施方式
[0031]
以下结合附图对本发明作进一步说明。
[0032]
如图1和2所示,一种车载自动追光发电装置,包括第一顶升件1、第二顶升件2、第三顶升件3、第一球铰座4、第二球铰座5、第三球铰座6、横向导轨7、纵向导轨8、追光板9和太阳能电池板。太阳能电池板的输出线连接到蓄电模块和发电量检测装置。发电量检测装置能够实时检测太阳能电池板的发电功率。
[0033]
第一顶升件1、第二顶升件2及第三顶升件3均安装在车辆的引擎盖、车顶或后备箱上,当本发明不工作或者三个顶升件在初始位置时,本发明嵌入车体结构内并使得太阳能电池板与汽车外观造型相互融合(即太阳能电池板是车身外观的一部分)。第一顶升件1、第二顶升件2及第三顶升件3顶部的升降块上均安装有球头。横向导轨7与纵向导轨8相互垂直,且均固定在追光板9的底面。横向导轨7及纵向导轨8上均滑动连接有滑块。第一球铰座4与追光板9的底面固定;第二球铰座5与横向导轨7上的滑块固定;第三球铰座6与纵向导轨8上的滑块固定;为使控制方便,通过使用不同厚度的球座,使第一球铰座4、第二球铰座5和第三球铰座6的三个球心能在第一顶升件1、第二顶升件2和第三顶升件3的行程一致时保持在同一平面上;第一顶升件1、第二顶升件2、第三顶升件3顶部的球头与第一球铰座4、第二球铰座5、第三球铰座6分别构成球面副。第一顶升件1与第二顶升件2的排列方向垂直于纵向导轨8的长度方向。太阳能电池板固定在追光板9的顶面。在追光板9水平的状态下,第三球铰座6位于第一球铰座4与第二球铰座5的对称面上。
[0034]
第一顶升件1、第二顶升件2及第三顶升件3结构相同,均包括基座、下撑杆、上撑杆、电机、丝杠、电机安装块、螺母和升降块。两根下撑杆的底端均与基座铰接(铰接轴不同轴),顶端与两根上撑杆的底端分别铰接;两根上撑杆的顶端均与升降块铰接(铰接轴不同轴)。螺母与其中一组下撑杆与上撑杆转动连接;电机安装块与另一组下撑杆与上撑杆转动连接。电机安装在电机安装块上,输出轴与丝杠的一端固定;丝杠与螺母构成螺旋副。通过电机转动,能够驱动升降块上下运动。
[0035]
该车载自动追光发电装置的工作方法,包括朝向调节方法和扫描追光方法具体如下:
[0036]
朝向调节方法具体如下:
[0037]
如图1所示,以纵向导轨8的长度方向作为x轴方向,以横向导轨7的长度方向作为y轴方向,竖直方向为z轴方向,建立空间直角坐标系。
[0038]
如果要使太阳能电池板绕x轴旋转,则第一顶升件1抬升,第二顶升件2降低,或第一顶升件1降低,同时第二顶升件2升高,但是要保证第一、第二顶升件2位置变化量相同,否则将破坏系统结构(避免对第三顶升件3产生作用力)。当调整到目标角度时,第一顶升件1、第二顶升件2、第三顶升件3同步下降,直到任意一个顶升件下降到下极限位置,这样既可以保证太阳能电池板位置角度不变,又可以使得太阳能电池板位置最低,从而减少汽车风阻。当某个顶升件到达极限位置时,则停止这个方向的跟踪。
[0039]
如果要使太阳能电池板绕y轴旋转,则第一顶升件1、第二顶升件2同步等量抬升,且第三顶升件3降低,或第一顶升件1、第二顶升件2降低,同时第三顶升件3抬升,此种情况下虽然不用保证第一、第二顶升件2变化量和第三顶升件3相同,但是为了控制方便,仍然使得第一、第二顶升件2位置变化量和第三顶升件3变位置化量相同。当第一顶升件1、第二顶升件2升到极限位置仍然未到达所需角度要求,则可保持第一顶升件1、第二顶升件2位置不变,继续降低第三顶升件3,直到角度达到要求或者第三顶升件3也到达极限位置时方可停止这个方向的跟踪。当调整到目标角度时,第一顶升件1、第二顶升件2、第三顶升件3同时下降,直到任意一个顶升件下降到极限位置,这样既可以保证太阳能电池板位置角度不变,又可以使得太阳能电池板位置最低,从而减少汽车风阻。
[0040]
在该车载自动追光发电装置启动时进行初始化,即通过前述朝向调节方法控制太阳能电池板绕x轴反转(即逆时针旋转)到极限位置,并绕y轴反转到极限位置。
[0041]
在该车载自动追光发电装置启动时,汽车位置的变化量达到预设量或者距离上一次调整太阳能电池板朝向的时长达到预设的调整周期(即认为太阳位置发生明显改变)时,追光板9进行对太阳位置进行扫描追光跟踪,具体扫描追光方法具体如下:
[0042]
当车辆静止时:
[0043]
步骤一、控制太阳能电池板绕x轴旋转追光。
[0044]
1-1.通过前述朝向调节方法控制太阳能电池板绕x轴正转(即顺时针旋转)一个预设夹角(本实施例中为1
°
)。
[0045]
1-2.若步骤1-1转动的过程中实时监测到的发电功率增大,则太阳能电池板继续绕x轴正转,且太阳能电池板每旋转一个预设夹角,均通过发电量检测装置实时检测当前的发电功率,直到实时监测到的发电功率由大变小(即本次检测到的发电功率相比于前一次检测到的发电功率减小或持平)时,太阳能电池板停止正转并绕x轴反向转动一个预设夹角。此时,太阳能电池板绕x轴的转角达到最佳。
[0046]
若步骤1-1转动的过程中实时监测到的发电功率减小,则太阳能电池板继续绕x轴反转,且太阳能电池板每旋转一个预设夹角,均通过发电量检测装置实时检测当前的发电功率,直到实时监测到的发电功率由大变小时,太阳能电池板停止绕x轴反转并正转一个预设夹角。此时,太阳能电池板绕x轴的转角达到最佳。
[0047]
步骤二、控制太阳能电池板绕y轴旋转追光。
[0048]
2-1.通过前述朝向调节方法控制太阳能电池板绕y轴正转(即顺时针旋转)一个预设夹角(本实施例中为1
°
)。
[0049]
2-2.若步骤2-1转动的过程中实时监测到的发电功率增大,则太阳能电池板继续
绕y轴正转,且太阳能电池板每旋转一个预设夹角,均通过发电量检测装置实时检测当前的发电功率,直到实时监测到的发电功率由大变小(即本次检测到的发电功率相比于前一次检测到的发电功率减小或持平)时,太阳能电池板停止绕y轴正转并反向转动一个预设夹角。此时,太阳能电池板绕y轴的转角达到最佳。
[0050]
若步骤2-1转动的过程中实时监测到的发电功率减小,则太阳能电池板继续绕y轴反转,且太阳能电池板每旋转一个预设夹角,均通过发电量检测装置实时检测当前的发电功率,直到实时监测到的发电功率由大变小时,太阳能电池板停止绕y轴反转并正转一个预设夹角。此时,太阳能电池板绕y轴的转角达到最佳。
[0051]
当车辆行驶时:
[0052]
本发明在具体安装时,使x轴方向指向汽车尾部,y轴方向汽车右侧(即从驾驶座指向副驾驶座位置)。当车辆行驶过程中,本发明控制系统可读取汽车当前gps信息或者北斗导航信息,通过计算出当前太阳能电池板和太阳之间的夹角,从而快速无需进行扫描,可快速将太阳能电池板调整到对准太阳的位置。例如,gps信息显示当前车头朝向正东方向,即x轴指向正西方向,y轴指向正南方向,那么此时车载追光系统便与太阳建立了相对固定的位置关系,通过计算当前太阳位置,迅速计算出太阳能电池板与太阳之间的位置偏差。
[0053]
依据上述方法即可使得太阳能电池板基本对准太阳,另外需设置合理的检查调整周期,动作太过频繁反而浪费电能。
[0054]
当天气差、没有太阳的环境下,停止系统工作,减少电能消耗和降低汽车风阻。
[0055]
当汽车车速超过预先设定的阈值时,将第一顶升件1、第二顶升件2、第三顶升件3均降低到最低位置,从而减少降低汽车风阻。当汽车熄火停车时,系统会自动开启,从而最大限度的提高发电量。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1