抑制AC/DC矩阵变换器输入不平衡影响的模拟阻抗控制方法与流程
抑制ac/dc矩阵变换器输入不平衡影响的模拟阻抗控制方法
技术领域
[0001]
本发明属于交流电能变换装置技术领域,涉及抑制ac/dc矩阵变换器输入不平衡影响的模拟阻抗控制方法。
背景技术:
[0002]
三相电流型整流器是一种单级buck型变流器,具有短路保护可靠、可靠性高(不需要电解电容器)、直流电压调节范围宽、冲击电流有限等优点,因而在电动飞机、数据中心系统、燃料电池供电系统等领域具有广阔的应用前景。然而,三相电流型整流器只在输出电压的极性可以倒转的情况下实现双向功率流,从而限制了它在某些领域的应用。为了解决这个问题,提出了ac/dc矩阵变换器,其继承了矩阵变换器和电流型整流器的优势,可实现自然双向功率流、功率密度高,适用于v2g、交直流混合微电网和可再生能源发电等场合。
[0003]
关于ac/dc矩阵变换器和电流型整流器,最具挑战性的问题是不平衡输入电压会导致变换器的输入电流极度恶化,甚至使得系统失控。针对ac/dc矩阵变换器,目前常用的输入不平衡下的控制方法如模型预测控制方案和改进的直接功率控制方法,可获得正弦输入电流和恒定直流电流,但需同时采样网侧电压、网侧电流、输入电容电压和直流电流,使用传感器数目多、成本高。
技术实现要素:
[0004]
针对以上问题,本发明提供了一种抑制ac/dc矩阵变换器输入不平衡影响的模拟阻抗控制方法,可以达到控制输入电流正弦和输出直流电流恒定的目的,解决了现有技术中使用传感器数目过多、以及参数依赖的问题,本专利抑制ac/dc矩阵变换器输入不平衡影响的模拟阻抗控制方法,其特征在于,在不平衡电压下能够得到正弦输入电流和恒定的直流电流;具体步骤如下,
[0005]
1)揭示修正静止坐标系下ac/dc矩阵变换器的外部模拟阻抗特性;
[0006]
即在修正静止坐标系中电流和电压关系能用差模电导和共模电导的关系表示,具体推导如下:
[0007]
不平衡输入电压矢量表示为:
[0008][0009]
在静止坐标系下面写成:
[0010][0011]
在静止坐标系下旋转角度得到修正坐标系下的两相电压如下:
[0012]
[0013]
可见修正坐标系下的电压u
′
α
和u
′
β
呈正交关系;
[0014]
输入电流表示为:
[0015][0016]
其中那么,瞬时输入有功功率和瞬时无功功率表示为:
[0017][0018]
其中上标“c”表示为共轭,各变量分别为:
[0019][0020]
为了使直流电流恒定、输入电流正弦,有功功率和无功功率平均值应保持恒定:
[0021][0022]
根据以上四个约束联立四个方程组解得修正坐标系下正序电流和负序电流为:
[0023][0024]
工作在单位功率因数下时满足q
*
=0,得到修正坐标系下满足控制要求的期望两相电流为:
[0025][0026]
将修正坐标系的电压和电流相除得到如下模拟电导
[0027][0028]
为了控制设计,定义共模电导g
com
和差模电导g
dif
分别为:
[0029][0030]
则电流电压关系能重新表述与差模电导和共模电导的关系:
[0031][0032]
2)通过坐标系自适应修正策略获取坐标旋转角度、状态观测器分解直流电流中脉动分量和构造期望阻抗算出期望电流信号;
[0033]
21)获取修正坐标系,修正坐标系旋转角度的获取采用自适应角度校正策略,具体如下:
[0034]
输入两路线电压信号经过3s/2s变换后,得到u
α
和u
β
,将静止两相电压u
α
和u
β
变换以到估计角为旋转角度的修正坐标系上的两相电压和
[0035][0036]
定义实际初相角和估计初相角之差为角度误差信号将上式用实际初相角和误差初相角重新表示:
[0037][0038]
为了抽取误差信号延迟和90度得到和延迟电压通过二阶双广义积分器sogi得到,构造下式得到角度误差信号:
[0039][0040]
通过pi控制器获得估计的旋转角度:
[0041][0042]
22)所述有功功率和电流联系如下:、
[0043]
动态直流电流表示为:
[0044][0045]
式中,i
dc
和u
dc
分别为矩阵变换器的直流电流和输出电压,e为电源电压,两边同乘i
dc
得到输入输出功率的关系,且忽略变换器的损耗:
[0046]
[0047]
式中,p
i
为输入功率,根据上一步揭示的在修正坐标系中电流和电压通过模拟电导联系;
[0048]
计算输入功率:
[0049][0050]
其中:
[0051][0052]
在稳态时,电感损耗基本忽略,电流表示为:
[0053][0054]
23)采用扩展状态观测器提取i
dc
的直流分量和交流分量,具体过程如下:
[0055]
定义x1=i
dc
,列写状态空间方程:
[0056][0057]
其中,观测矩阵为:观测矩阵满秩,该系统能观;
[0058]
设计扩张观测器:
[0059][0060]
其中反馈矩阵l=[l
1 l
2 l3]
t
;
[0061]
定义误差信号求得误差方程如下:
[0062][0063]
其中:将ac设计为hurwitz矩阵,观测误差即收敛为0,也同时求得反馈矩阵l;
[0064]
24)变换器外部特性共模电导和差模电导与有功功率的内在联系;
[0065]
将输入功率用共模电导和差模电导表示如下:
[0066][0067]
有功功率的直流量主要由共模电导g
com
决定,有功功率的交流量主要由差模电导g
dif
决定,也就阐述了共模电导g
com
与电流直流量i
dc
相关,差模电导g
dif
与电流交流量相关;
[0068]
构造期望阻抗,达到控制输入电流正弦和输出电流恒定的目的,具体过程如下:
[0069][0070][0071]
其中ρ
dif
和有功功率交流量正相关,它能通过一个中间变量e
dif
经过低通滤波器得到:
[0072][0073][0074]
表明设计的ρ
dif
恰能反映有功功率交流量的变化,能够达到控制目的;
[0075]
通过修正坐标系下的ac/dc矩阵变换器的外部特性能够计算出期望输入电流参考,具体过程如下:
[0076]
首先根据修正坐标系下的输入电流和电导的约束关系计算出修正坐标系下的期望电流,然后借助坐标反变换求解出原静止坐标系下的期望输入电流,具体计算公式为:
[0077][0078]
3)采用空间矢量调制合成期望电流。
[0079]
本发明提供的一种抑制ac/dc矩阵变换器输入不平衡影响的模拟阻抗控制方法,可以使ac/dc矩阵变换器系统在电网电压不平衡的情况下,得到恒定的直流电流和正弦输入电流。该方法只需测量电容电压和直流电流,降低了系统的成本,一定程度上提高了系统的鲁棒性。此外该方法不依赖输入滤波器参数,因此参数鲁棒性强,所提方法对其他三相ac/dc变换器的不平衡控制方法有指导作用。
附图说明
[0080]
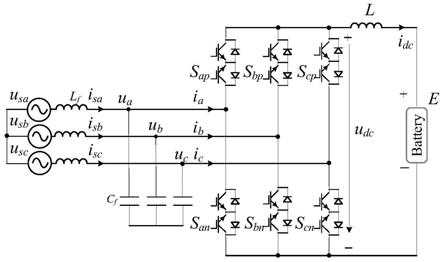
图1本发明实施例变换器的结构框图;
[0081]
图2本发明实施例控制系统dsp控制框图;
[0082]
图3本发明实施例控制系统的控制算法框图;
[0083]
图4本发明采用的调制策略图;
[0084]
图5网侧不平衡电压波形;
[0085]
图6工况一:整流模式实验结果;
[0086]
图7工况二:整流模式下直流电流参考设置为10a实验结果;
[0087]
图8工况二:逆变模式下直流电流参考设定为-10a实验结果;
[0088]
图9直流参考电流从6a跳变到10a的动态实验结果。
具体实施方式
[0089]
下面结合附图与具体实施方式对本发明作进一步详细描述:
[0090]
本发明提供抑制ac/dc矩阵变换器输入不平衡影响的模拟阻抗控制方法,可以达到控制输入电流正弦和输出直流电流恒定的目的,解决了现有技术中使用传感器数目过多、以及参数依赖的问题。
[0091]
如图1所示,一种具有在不平衡工况下,输入正弦电流和确保直流电流恒定的ac/dc矩阵变换器,包括交流电压源,输入电感l
f
,和输入电容c
f
,三相逆变桥,直流侧大电感l,直流电压源;输入电感l
f
和电压源串联,输入电容c
f
经电感连接后的线路并联。直流侧大电感和直流电源串联。
[0092]
图2为本发明控制系统dsp控制框图,图中的主电路包括输入滤波器,整流器,直流电感,直流电压源;控制电路包括采样调理电路1,控制器2,驱动电路3;
[0093]
采样电路1的右边部分采样电路负责直流侧电流的采样和调理,采样电路的左边部分采样电路负责交流母线线电压采样和调理。控制器2负责计算和调制等重要工作,并把各pwm开关信号传递给驱动电路3,从而达到控制各开关的目的。
[0094]
网侧滤波器2为二阶lc低通滤波器,其作用是:一、滤除开关器件产生的开关纹波电流;二、在一定程度上阻止来自电网的电压谐波对变换器的影响。
[0095]
图3为本发明实施例控制系统的控制算法框图;主要包括:
[0096]
步骤1:根据采样线电压u
ab
和u
bc
和自适应角度修正算法计算修正坐标系的旋转角度;
[0097]
首先,根据采样线电压经过3s/2s变换获得u
α
和u
β
,然后借助反馈的角度修正信号计算和通过sogi获得滞后的修正电压信号和
[0098]
角度误差信号构造为:
[0099][0100]
将角度误差信号作为pi的输入得到角度估计值具体表达式如下:
[0101][0102]
步骤2:将输出直流电流i
dc
输入状态观测器得到通过将误差方程中的矩阵特征值配置为:λ(s)=(s+ω
c
)3,可得
[0103][0104]
结合状态观测器:根据采样的直流电流,借助前向差分的离散化
方法,获得下一时刻的估计值和
[0105]
步骤3:构造共模电导和差模电导。
[0106]
求解将e
dif
通过低通滤波后得到ρ
dif
[0107][0108]
根据
[0109][0110][0111]
可计算得到共模电导和差模电导。
[0112]
步骤4:计算调制信号和
[0113][0114]
步骤5:根据调制信号和基于空间矢量调制策略(如图4所示),计算占空比。
[0115][0116]
其中m
c
(0≤m
c
≤1)为调制系数,θ
i
为合成矢量的相对角度,计算方式如下:
[0117][0118]
其中atan2为取反正切函数,mod为取余操作,k代表合成电流矢量所在的扇区。
[0119]
测试包括以下两种工况:
[0120]
(1)源电压是平衡的,有效值为110v。
[0121]
(2)源电压不平衡,三相电压的有效值分别为110v,88v,66v且相差电角度120
°
,如图5。
[0122]
电源频率为50hz,控制周期100μs,输入电源和滤波器电感0.6mh,输入滤波电容9.9μf,直流电源60v,直流电感5mh,验证工况(1)时,直流参考设置为10a,验证工况(2)时候,分别设置整流和逆变模式下的直流电流参考为10a和-10a。
[0123]
实验结果证实了所提不平衡控制方法的正确性和可行性。在工况一下的实验结果如图6,能够得到平衡的正弦输入电流和恒定的直流电流。图7为在工况二整流模式下直流电流参考设置为10a的实验结果,能够得到正弦的输入电流和恒定直流电流。图8为在工况二逆变模式下直流电流参考为-10a的实验结果,证明所提控制方法能够保证整流模式和逆变模式下均实现单位功率因数、输入电流正弦和恒定直流电流。图9为直流参考电流阶跃变化6a到10a的动态响应图。
[0124]
以上所述,仅是本发明的较佳实施例而已,并非是对本发明作任何其他形式的限制,而依据本发明的技术实质所作的任何修改或等同变化,仍属于本发明所要求保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1