带电更换特高压线路绝缘子机器人控制系统及方法与流程
[0001]
本专利涉及一种高压输电线路更换绝缘子工具,特别是一种带电更换特高压线路绝缘子机器人控制系统及方法。
背景技术:
[0002]
我国自1954年开展带电作业六十多年以来,一直采用专业人员身穿屏蔽服及依托绝缘工机具进入强电场更换劣化、低值零值绝缘子,存在着人员风险及工机具笨重的缺点;随着国家电网输电线路电压等级越来越高,采用电压为330kv-1000kv的远距离输送电力的超高压和特高压交直流电力线路越来越多,但特高压和超高压输电线路的耐张绝缘子现在大多使用420kn、530kn、550kn吨位的绝缘子,单片绝缘子的重量达到17kg到22kg,施工人员仅仅是提起绝缘子就已经非常费力,不借助其它工具几乎无法对劣化绝缘子进行更换,而施工所使用的工具也是非常的笨重。所以传统的等电位人工作业方法即使采用停电工作也非常困难,人工作业方法不但劳动强度大,而且施工人员的工作环境还非常地危险。
[0003]
近几年来,电力系统相继研制出并投入使用的特种机器人可用于输电线路的检修作业,如除冰机器人、绝缘子检测机器人、载人作业机器人、巡线机器人等,但是用于更换绝缘子的机器人尚在研制中,目前已经可以实现在绝缘子串上行走,可以在高空运送绝缘子,自动卡持(液压收紧)绝缘子,但还在实验阶段,还很不完善,而且所说的机器人目前仅仅是代替部分人工操作,如申请号为202010147802.0、专利名称为“带电更换特高压和超高压耐张单片绝缘子机器人用卡具”的中国专利就公开了一种用于更换绝缘子机器人用卡具,其实质是一种自动液压收紧装置,对需要更换的绝缘子的两端相邻的绝缘子自动收紧,但是还需要施工人员在机器人移动平台上人工辅助操作,人工拔销和人工把劣化的绝缘子从绝缘子串中摘除后再人工安装新的绝缘子,特别是还需要人工把绝缘子从绝缘子串中取出,在高空操作时转动绝缘子瓷瓶的难度很大,工人的劳动强度大,工作效率低。
[0004]
为此,更换绝缘子机器人的自动化功能还需要进一步研发,尤其是作为机器人神经系统的控制系统需要重新开发,从而使更换绝缘子机器人更加智能,实现远程自动化操作,减少人员的参与工作量。
技术实现要素:
[0005]
本专利的目的就是设计一种带电更换特高压线路绝缘子机器人控制系统及方法,人员只需要在地面操控就可以实现高空更换绝缘子的全程自动化。
[0006]
本专利的技术方案是:带电更换特高压线路绝缘子机器人控制系统,其特征是:包括操作控制单元、机器人执行单元、网络通信单元及视频监控单元;
[0007]
所述操作控制单元包括设置在地面或者机器人移动平台外的工控机和两只手动摇杆;工控机安装有机器人控制软件,用于控制指令的解析、收发、八通道视频数据的解码与播放,工控机连接有触摸屏,在屏幕上手动操作自动完成画面切换和触发操作指令,实现人机交互;
[0008]
所述摇杆连接开关量输入模块,通过工控机配合摇杆手动操作发出控制指令,所述摇杆为两只,一只用于控制通道切换,另一只用于机器人动作操控,摇杆的控制信号经开关量输入模块后转换为rs485通信数据发送给工控机,在工控机内设置有第一无线网桥,工控机将接收到的数据进行解析后转换为控制指令并通过第一无线网桥发送给机器人执行单元;
[0009]
所述机器人执行单元包括设置在机器人移动平台上的工业交换机、串口服务器和多个电机驱动器;工业交换机与移动平台上的第二无线网桥电连接,工业交换机从第二无线网桥接收控制指令,通过串口服务器转发给各电机驱动器,电机驱动器控制机器人个操作元件动作;
[0010]
视频监控单元包括设置在机器人移动平台上的多个工业摄像头,其视频信号经工业交换机汇集后依次通过第二无线网桥、第一无线网桥实时传送至工控机上,在工控机端安装视频解码软件实现视频图像显示,实现多画面切换,自动变焦等功能;
[0011]
所述网络通讯单元包括设置在机器人移动平台上的第二无线网桥和设置在工控机上的第一无线网桥,第一无线网桥和第二无线网桥形成无线通讯网络;
[0012]
所述电机驱动器识别是指令目标地址及数据的完整性,如果数据无误便按照指令操作启动输出,完成机械臂动作执行;当发生堵转、过流、限位等异常情况时,电机驱动器会自动启动保护功能;
[0013]
所述触摸屏上设置有执行单元指令区域、电源开关按钮、切换摄像头按钮、操作步骤按钮、当前通道状态显示区域、当前画面区域;所述执行单元指令区域包括机器人执行单元各电机驱动器控制按钮菜单,用于选取要执行的的电机驱动器工作和关闭;电源开关按钮用于开启操作控制单元电源;切换摄像头按钮用于不同的摄像头视频画面的切换;操作步骤按钮用于引导当前动作执行元件的操作;当前通道显示状态区域显示当前选取的执行指令操作状态;当前画面区域用于显示当前摄像头的视频画面;
[0014]
所述电机驱动器包括皮带行走机构行走电机驱动器、转瓶器电机驱动器、机械臂动作电机驱动器、绝缘子自动收紧卡具上盖螺栓锁紧电机驱动器以及机器人液压动力源油泵电机驱动器;
[0015]
带电更换特高压线路绝缘子机器人控制方法,包括以下步骤:
[0016]
1)开启操作控制单元电源,检测网桥和通讯状态;如果网络通讯状态正常,则进入到下一步;
[0017]
2)连接网桥并初始化视频解码;
[0018]
3)操作工控机控制面板,通过触摸屏切换摄像头到需要的视频界面;
[0019]
4)操控工控机控制面板,通过触摸屏切换到需要的执行单元指令;
[0020]
5)操控摇杆a,判断是否需要切换电机;如果判断不是当前需要执行指令的电机,则通过操作摇杆a切换到需要执行指令的电机;如果判断是当前需要执行指令的电机,则不需要切换,直接进入下一步;
[0021]
6)通过操作摇杆b,控制当前的电机动作。
[0022]
本专利的优点是:操作人员在地面就可以远程操作实现完成在绝缘子串上行走、绝缘子卡持收紧、转瓶、拔销、摘除和安装新绝缘子等工作,自动化程度大大提高;整个机械动作过程通过视频监控单元(网络摄像头)将画面实时传送至操作控制单元工控机屏幕上,
实现了可视化操控,更好的确保了操作执行的安全性及可靠性。
附图说明
[0023]
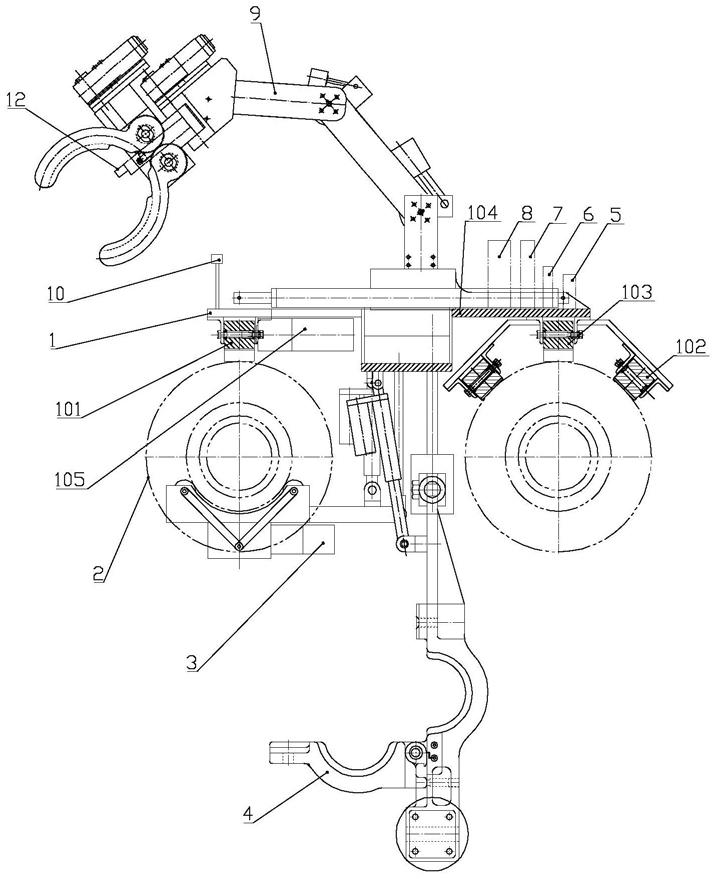
图1为移动平台及机器人执行单元连接示意图;
[0024]
图2为机器人控制系统框图;
[0025]
图3为操作控制单元原理图;
[0026]
图4为机器人执行单元控制原理图;
[0027]
图5为视频监控单元控制原理图;
[0028]
图6为开关量输入模块内部原理图;
[0029]
图7为操作控制系统操作流程图;
[0030]
图8为操作控制单元触摸屏屏幕界面示意图;
[0031]
图中:1-移动平台;101-左行走带轮;102-导向带轮;103-右行走带轮;104-平台体;105-行走电机;2-绝缘子;3-转瓶器;;4绝缘子自动收紧卡具;5-工业交换机;6-串口服务器;7-电机驱动器;8-第二无线网桥;9-机械臂;10摄像头;11-摇杆a;12-拔销器;13-摇杆b;14-开关量输入模块;15-工控机;16-第一无线网桥;17-执行单元指令区域;18-电源开关按钮;19-切换摄像头按钮;20-操作步骤按钮;21-当前通道状态按钮;22-当前画面区域。
具体实施方式
[0032]
下面结合附图和具体实施方式对本发明进行详细说明。
[0033]
本专利所述带电更换特高压线路耐张单片绝缘子机器人包括机器人移动平台1、机器人执行单元、操作控制单元和视频监控单元;
[0034]
更换单片绝缘子2时,把机器人移动平台1放置到平行的耐张双串绝缘子串上,如图1所示,在机器人移动平台1的平台体104上设置有工业交换机5、串口服务器6、电机驱动器7、第二无线网桥8、直流电源、机器人液压动力源以及放置待更换的新的绝缘子座架等,移动平台1的平台体104下方设置有左行走带轮101、右行走带轮103和两组导向带轮102,右行走带轮103、左行走带轮101和导向带轮102均是在多个带轮的外圆上设置皮带跨多个绝缘子2的瓷瓶构成的皮带行走机构,其中两组导向带轮102成一定角度(约90度)布置,卡持在一组绝缘子串(右侧绝缘子串)上的多个(通常为三到六个)轮缘子2的瓷瓶两侧,起到导向和定位作用;左行走带轮101和右行走带轮103分别置于两组绝缘子串上多个(通常三到六个)绝缘子2的瓷瓶的顶部,行走带轮的带轮上设置有行走电机105,通过行走电机105驱动两组行走带轮在绝缘子串上沿导线方向移动。
[0035]
如图2所示,本专利所述带电更换特高压线路耐张单片绝缘子机器人控制系统包括机器人机器人执行单元、操作控制单元、视频监控单元和网络通讯单元;操作控制单元通过网络通讯单元连接机器人执行单元和视频监控单元。
[0036]
如图1、图4所示,所述机器人执行单元包括皮带行走机构、绝缘子自动收紧卡具4、机械臂9、转瓶器3、拔销器12;串口服务器6和机器人执行单元中各电机驱动器7通过rs485总线连接,每个电机驱动器7分别与串口服务器6通过rs485接头连接;串口服务器6依次与工业交换机5和第二无线网桥8电连接,液压动力源给机器人各液压执行部件提供动力。由于在无线以太网上不但要传送控制指令,还要传输视频图像数据,因此通过一台工业串口
服务器6对控制指令数据进行了分离,通过ip地址绑定实现了摄像头10的视频切换访问,电机控制器7通过地址拨码设置,控制指令通过libmodbus-rtu协议实现了独立操作,电源由锂电池供电。
[0037]
如图5所示,所述视频监控单元包括设置在移动平台上的多个摄像头10,每个摄像头10分别通过工业交换机5与第二无线网桥8电连接,每个摄像头10的视频信号通过工业交换机5和第二无线网桥8发送到操作控制单元;视频监控单元用于地面或者远程操作时,实时监控各执行机构的状态和动作执行情况。
[0038]
如图3所示,操作控制单元以安卓系统的工控机15为核心,主要由第一无线网桥16、三维数字摇杆、触摸屏、电源等模块组成,系统电源由锂电池供电,所述操作控制单元包括远程设置的工控机15和摇杆,工控机15内设置有开关量输入模块14和第一无线网桥16,摇杆通过开关量输入模块14与工控机15电连接。工控机15安装有机器人控制软件,用于控制指令的解析、收发、八通道视频数据的解码与播放,工控机15设置有触摸屏,方便实现人机对话,触摸屏手动操作自动完成画面切换,实现人机交互。所述摇杆为两只,其中摇杆a11用于控制通道切换,摇杆b13用于机器人动作操控;两只三维摇杆每间隔0.5s将位移数据发送给工控机15,工控机15通过解析摇杆报文数据,生成控制指令并通过第一无线网桥16将指令发布出去。摇杆的控制信号经开关量输入模块14后转换为rs485通信数据发送给电机驱动器7。另外摄像头10的视频数据同时搭载无线网桥链路一并传送至工控机15,并在触摸屏上实时显示出来,软件菜单操作均通过触摸屏完成,整个系统拓扑清晰,功耗小,工作可靠稳定。
[0039]
如图6所示,开关量输入模块14主要由电源、开关量采集输入电路、rs-485隔离通讯接口以及mcu等组成。开关量输入模块14的微控制器采用32位risc的arm芯片,具有非常快速的数据处理能力,在内部输入、输出单元采用了光电隔离芯片对信号进行转换,并对输入信号采取滤波措施,极大降低了工业现场干扰对模块正常运行的影响,使模块具有良好的可靠性。采用带隔离的rs-485通信接口,可以避免干扰信号对微控制器通讯接口的影响,并具有esd、过压、过流保护。增加了地址拨码开关的设计,方便模块地址快速设置。
[0040]
如图8所示,在工控机15的触摸屏上设置有执行单元指令区域17、电源开关按钮18、切换摄像头按钮19、操作步骤按钮20、当前通道状态显示区域21、当前画面区域22;所述执行单元指令区域17包括机器人执行单元各电机驱动器7的控制按钮菜单,用于选取要执行的的电机驱动器7工作和关闭;电源开关按钮18用于开启工控机电源;切换摄像头按钮19用于不同的摄像头视频画面的切换;操作步骤按钮20用于引导当前动作执行元件的操作;当前通道显示状态区域21显示当前选取的执行指令操作状态;当前画面区域22用于显示当前摄像头的视频画面。
[0041]
所述网络通讯单元包括设置在移动平台1上的第二无线网桥8和设置在工控机15内的第一无线网桥16,第一无线网桥16和第二无线网桥8之间无线通讯;通过工控机15内置软件、人机界面操作配合摇杆手动操作发出控制指令,操作控制指令经网络通讯单元发送到机器人执行单元。操作控制单元通过视频监控单元可以实时切换到相应的摄像头画面,方便操作和监控。
[0042]
所述机器人电机驱动器7识别是指令目标地址及数据的完整性,如果数据无误便按照指令操作启动输出,完成各操作元件动作;当发生堵转、过流、限位异常情况时,该电机
驱动器7会自动启动保护功能,确保动作执行的安全。
[0043]
使用时,把移动平台1架设在需要更换的耐张双串绝缘子上,承载执行单元和网络通讯控制系统元件;皮带行走机构用于移动平台1可以根据远程操作控制单元发出的操作指令,通过电机驱动器7控制行走电机105动作,从而把移动平台1移动到双绝缘子串上需要的位置;绝缘子自动收紧卡具4用于卡持和收紧需要更换的绝缘子两侧的绝缘子,使需要更换的绝缘子2松弛;转瓶器3是在绝缘子自动收紧卡具4收紧后,把绝缘子2旋转到便于把r销和便于把需要更换的绝缘子从两侧的绝缘子中取出的位置;拔销器12是把需要更换的绝缘子2及其前端相邻的绝缘子上的r销拔出来;机械臂9作为机器人的核心部件,用于把需要更换的绝缘子从绝缘子串中摘取出来并把新的绝缘子安装到原来的位置;视频监控单元是在移动平台1上把各部分的实时图像传送到远程的操作控制单元的工控机计算机屏幕上,辅助操作;操作控制单元的作用是通过屏幕切换画面查看每个摄像头10所拍摄的实时画面,观察移动平台1及各相关部件的实时状态,远程操作控制皮带行走机构、转瓶器3、绝缘子自动收紧卡具4、机械臂9、拔销器12完成相关工作。
[0044]
如图7所示,带电更换特高压线路绝缘子机器人控制方法,其步骤如下:
[0045]
1)在工控机触摸屏上开启操作控制单元电源的电源开关按钮18,检测第一无线网桥16、第二无线网桥8以及通讯状态;如果网络通讯状态正常,则进入到下一步;
[0046]
2)工控机自动连接网桥并初始化视频解码;
[0047]
3)操作工控机触摸屏上的切换摄像头按钮19,切换摄像头到需要的视频界面;
[0048]
4)在工控机触摸屏上的执行单元指令区域17中,选择需要执行的执行单元命令;选择后则当前通道状态显示区域21显示切换到的电机工作状态,在通过操作步骤按钮20引导完成相应的操作;
[0049]
5)操控摇杆a11,判断是否需要切换电机;如果判断不是当前需要执行指令的电机,则通过操作摇杆a11切换到需要执行指令的电机;如果判断是当前需要执行指令的电机,则不需要切换,直接进入下一步;
[0050]
6)通过操作摇杆b13,通过开关量输入模块14把指令传送到工控机15,工控机15通过网络通讯单元把电机动作指令发送到相应的电机控制器,从而控制相应的电机动作。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1