一种基于无人机辅助上线的带电安装接地挂环机器人的制作方法
1.本发明涉及电力系统辅助设备技术领域,具体涉及一种基于无人机辅助上线的带电安装接地挂环机器人。
背景技术:
2.高压接地线是将已停电设备临时短路接地用的一种安全用具,其作用是对高压设备进行停电检修或进行其他工作时,防止设备突然来电和邻近高压带电设备产生感应电压对人体的危害,同时泄放断电设备的剩余电荷,按照相关电力规范每根导线近塔端都需要预留安装接地线夹方便检修时搭接地线。而目前很多运营中线路都未安装接地线夹,需要人工带电加装。目前在带电导线上加装接地线夹方法为利用绝缘斗臂车将工人输送至近导线端,操作工人穿好绝缘屏蔽服,利用夹具和扭力扳手等工具徒手安装。从操作上来说受到空间、高空作业环境等影响,难度系数较大。部分厂家作为研发课题,研制出半自动的安装机械臂,依靠人或者斗臂车输送到近导线位置进行安装。
3.如中国专利cn106737756a,公开日2017年5月31日,一种基于高压配电线路验电及接地线作业的机器人系统,包括机器人本体,机器人本体包括相连接的移动机构、三自由度机械操作臂,还包括安装于机器人本体上的控制箱体,控制箱体的内部安装有控制单元、第一电源模块及第一通讯模块;第一电源模块与控制单元连接,控制单元与所述驱动模块连接,驱动模块分别与移动机构、三自由度机械操作臂连接;控制单元通过第一通讯模块分别与手持控制终端、地面控制终端连接。其技术方案仍然需要依靠大型辅助设备,而且操控难度大,操作复杂,对操作人员的要求较高。
技术实现要素:
4.本发明要解决的技术问题是:目前架空导线临时安装接地线不方便的技术问题。提出了一种基于无人机辅助上线的带电安装接地挂环机器人,能够借助无人机方便的实施架空导线的接地。
5.为解决上述技术问题,本发明所采取的技术方案为:一种基于无人机辅助上线的带电安装接地挂环机器人,与无人机搭配使用,包括挂盘、挂线支架、挂线、翻转拉线、翻转架、支座、电动锁、行走轮、驱动电机、工作台、线夹座、穿刺线夹、拧紧机构、遥控器和控制器,所述挂盘安装在无人机底部,所述挂线支架与挂盘固定连接,所述挂线与挂线支架连接,所述支座以及线夹座均安装在工作台上,所述翻转架转动安装在支座上,所述电动锁安装在所述支座上,所述翻转架上加工有与所述电动锁匹配的锁孔,所述翻转拉线一端与翻转架连接,翻转拉线另一端垂于地面,所述行走轮转动安装在所述翻转架上,所述驱动电机安装在所述翻转架上,所述行走轮与驱动电机连接,所述穿刺线夹安装在所述线夹座上,所述拧紧机构安装在所述工作台上,所述拧紧机构与穿刺线夹的拧紧螺钉连接,所述电动锁、拧紧机构、驱动电机和遥控器均与控制器连接。通过无人机吊起挂线,挂线最底端升高至高于目标导线的位置,控制无人机下降高度,使挂线位于目标导线一侧,而后控制无人机横跨
目标导线,并将挂线释放,挂线另一端在重力作用下落到地面,挂线一端与机器人的挂接点连接,另一端由操作人员拉拽,即可将机器人快速升高至目标导线下方,而后通过翻转拉线将安装有行走轮的翻转架翻转,继续拉拽挂线使行走轮高于目标导线,释放翻转拉线,翻转架自动恢复,并将行走轮卡在目标导线上,而后电动锁闭锁,机器人在行走轮驱动下沿目标导线行走至预定位置,开启拧紧机构驱动穿刺线夹闭合,实现目标导线的连通,穿刺线夹预先连接接地线夹,即可完成目标导线的接地。
6.作为优选,还包括第一挂线头和第二挂线头,所述挂线包括第一挂线和第二挂线,所述挂线支架两端分别与第一挂线头和第二挂线头连接,所述第一挂线与第一挂线头固定连接,所述第二挂线与第二挂线头连接,所述工作台具有两个挂线点,所述挂线支架长度与工作台的两个挂线点距离对应。
7.作为优选,所述挂线支架包括套管、左挂杆、右挂杆、左齿条、右齿条、驱动齿轮和驱动机构,所述左挂杆与右挂杆分别套接在所述套管的左边和右边,所述左齿条与左挂杆固定连接,所述右齿条与右挂杆固定连接,所述驱动齿轮与套管转动连接,所述驱动机构与驱动齿轮连接,所述左齿条和右齿条均与驱动齿轮啮合,所述左挂杆与第一挂线头连接,所述右挂杆与第二挂线头连接。通过驱动机构带动驱动齿轮转动,进而带动左齿条和右齿条移动,从而使得左挂杆和右挂杆伸出长度的变化,调整挂线支架的长度,适应不同的机器人。
8.作为优选,所述驱动齿轮包括摩擦杆、摩擦轮、固定轴、驱动管、驱动弹簧、锁定弹簧和锁定环,所述固定轴与套管固定连接,所述驱动齿轮与固定轴转动连接,所述摩擦轮与驱动齿轮同心固定连接,所述驱动管与套管固定连接,所述驱动弹簧安装在驱动管内,所述摩擦杆一端套入所述驱动管,所述驱动弹簧一端与驱动管固定连接,驱动弹簧另一端与摩擦杆固定连接,驱动弹簧两端通过导线与电子开关k1和直流电源bt1连接,所述摩擦杆与摩擦轮抵接,所述摩擦轮中空且远离驱动齿轮的一端开口,所述摩擦轮靠近驱动齿轮的一端加工有锁定孔,所述锁定环套接在所述固定轴上,所述固定轴上设有卡条,所述锁定环加工有卡槽,所述卡条和卡槽卡接,所述锁定环加工有与锁定孔匹配的突刺,所述锁定弹簧一端与锁定环固定连接,锁定弹簧另一端与套管固定连接,锁定弹簧两端通过导线与电子开关k2和直流电源bt2连接。驱动弹簧在通入电流时产生收缩,收缩量与通入的电流相关,通过电子开关k1的pwm控制实现调整驱动弹簧通电电流的大小控制,从而控制驱动弹簧的收缩量,同样通过电子开关k2的pwm控制实现锁定环与锁定孔的锁定或脱离,当驱动弹簧收缩时带动摩擦杆移动,从而带动摩擦轮转动,即带动驱动齿轮转动,当电子开关k1保持断开,驱动弹簧伸长,摩擦轮会反向转动,此时控制电子开关k2也断开,锁定弹簧伸长使得锁定环与锁定孔锁紧,摩擦轮因锁死而不能反向转动,即实现了驱动齿轮沿一个方向转动。若使驱动齿轮沿另一个方向转动,只需在驱动弹簧收缩时锁定摩擦轮,在驱动弹簧伸长时解锁摩擦轮。
9.作为优选,所述第一挂线头和第二挂线头均加工有凹槽,所述凹槽内壁加工有缺口,所述左挂杆以及右挂杆末端均安装有挂接机构,所述挂接机构与所述凹槽连接,所述挂接机构包括挂接弹簧、挂接头和挂接球,所述左挂杆以及右挂杆末端均加工有盲孔,所述盲孔的壁沿径向加工有通孔,所述挂接球置入所述通孔内,所述挂接头套入所述盲孔开口处,所述挂接弹簧一端与盲孔底部固定连接,挂接弹簧另一端与挂接头连接,所述挂接弹簧两
端通过导线与电子开关k3和直流电源bt3连接,所述挂接头与第一挂线头及第二挂线头的凹槽匹配,所述挂接头与挂接头抵接,所述挂接头外壁具有将挂接球挤出左挂杆及右挂杆外壁的锁紧部,所述挂接头外壁还具有使得挂接球缩回左挂杆及右挂杆外壁的容纳部。挂接弹簧收缩时会拉动挂接头上升,从而使得容纳部与挂接球抵接,第一挂线头和第二挂线头在重力作用下将挂接球挤入左挂杆及右挂杆,第一挂线头和第二挂线头随即脱落,坠落地面。
10.作为优选,还包括拉线头和拉线杆,所述拉线杆固定安装在翻转架上,所述拉线头与拉线杆转动连接,所述翻转拉线与拉线头固定连接。
11.作为优选,还包括压紧弹簧,所述驱动电机连接有方轴,所述翻转架上设有行走轮安装槽,所述方轴与所述行走轮安装槽转动连接,所述行走轮与方轴连接,所述压紧弹簧安装在行走轮和行走轮安装槽之间。
12.本发明的实质性效果是:通过无人机吊起挂线,将挂线最底端升高至高于目标导线的位置,而后横越目标导线后释放挂线,即可将挂线挂在目标导线,由地面人员通过拉拽挂线将机器人升起,操作人员无需爬塔及进入电场,在地面可完成操作过程,提升作业安全性;无需借助绝缘斗臂车等大型设备,能覆盖大部分复杂地形,适用性强,携带方便,能提高作业效率;借助无人机携带轻质挂线辅助机器人上线,使机器人能够方便的从合适的位置上线,快速行走到安装位置,减少作业耗时。
附图说明
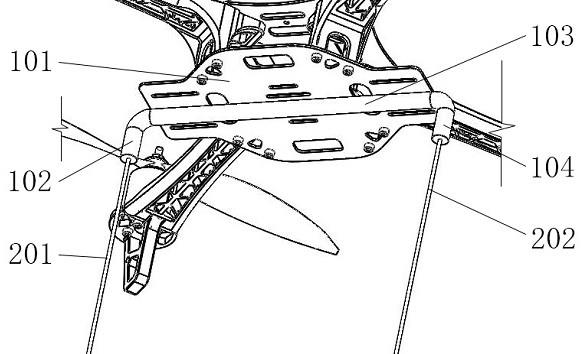
13.图1为实施例一挂线支架安装示意图。
14.图2为实施例一无人机挂线示意图。
15.图3为实施例一无人机挂线结果示意图。
16.图4为实施例一挂线连接机器人示意图。
17.图5为实施例一机器人行走轮上线示意图。
18.图6为实施例一机器人线夹座示意图。
19.图7为实施例二挂线支架结构示意图。
20.图8为实施例二挂线支架零件爆炸图。
21.图9为实施例二挂线支架驱动机构示意图。
22.图10为实施例二挂线支架驱动机构剖面示意图。
23.图11为实施例二挂接机构剖面示意图。
24.其中:101、挂盘,102、第一挂线头,103、挂线支架,104、第二挂线头,105、无人机,106、左挂杆,107、套管,108、右挂杆,109、左齿条,110、右齿条,111、驱动管,112、摩擦杆,113、摩擦轮,114、驱动齿轮,115、驱动弹簧,116、锁定弹簧,117、固定轴,118、锁定环,119、锁定孔,120、挂接弹簧,121、挂接头,122、挂接球,201、第一挂线,202、第二挂线,203、翻转拉线,3、目标导线,401、翻转架,402、行走轮,403、驱动电机,404、支座,405、拉线杆,406、工作台,407、压紧弹簧,408、方轴,409、拉线头。
具体实施方式
25.下面通过具体实施例,并结合附图,对本发明的具体实施方式作进一步具体说明。
26.实施例一:一种基于无人机105辅助上线的带电安装接地挂环机器人,与无人机105搭配使用,包括挂盘101、挂线支架103、挂线、翻转拉线203、翻转架401、支座404、电动锁、行走轮402、驱动电机403、工作台406、线夹座、穿刺线夹、拧紧机构、遥控器和控制器,如图1所示,挂盘101安装在无人机105底部,挂线支架103与挂盘101固定连接,挂线与挂线支架103连接。如图2、图3所示,挂线包括第一挂线201和第二挂线202,挂线支架103两端分别与第一挂线头102和第二挂线头104连接,第一挂线201与第一挂线头102固定连接,第二挂线202与第二挂线头104连接,工作台406具有两个挂线点,挂线支架103长度与工作台406的两个挂线点距离对应。无人机105飞到目标导线3上方,使第一挂线201和第二挂线202分别位于目标导线3两侧,而后无人机105沿自身旋转,使第一挂线201和第二挂线202紧贴目标导线3,无人机105沿目标导线3法向少量移动,释放其中一个挂线,如第一挂线201,并使第一挂线201挂在目标导线3上后两端均垂于地面,而后无人机105反向移动,释放另一个挂线,如第二挂线202,使得第二挂线202挂在目标导线3上后两端均垂于地面。从而将第一挂线201和第二挂线202挂在目标导线3上。
27.如图4、图5所示,支座404以及线夹座均安装在工作台406上,翻转架401转动安装在支座404上,电动锁安装在支座404上,翻转架401上加工有与电动锁匹配的锁孔,拉线头409和拉线杆405,拉线杆405固定安装在翻转架401上,拉线头409与拉线杆405转动连接,翻转拉线203与拉线头409固定连接。行走轮402转动安装在翻转架401上,驱动电机403安装在翻转架401上,驱动电机403连接有方轴408,翻转架401上设有行走轮402安装槽,方轴408与行走轮402安装槽转动连接,行走轮402与方轴408连接,压紧弹簧407安装在行走轮402和行走轮402安装槽之间,行走轮402与驱动电机403连接,穿刺线夹安装在线夹座上,拧紧机构安装在工作台406上,拧紧机构与穿刺线夹的拧紧螺钉连接,电动锁、拧紧机构、驱动电机403和遥控器均与控制器连接。
28.本实施例的有益技术效果是:通过无人机105吊起挂线,将挂线最底端升高至高于目标导线3的位置,而后横越目标导线3后释放挂线,即可将挂线挂在目标导线3,由地面人员通过拉拽挂线将机器人升起,操作人员无需爬塔及进入电场,在地面可完成操作过程,提升作业安全性;无需借助绝缘斗臂车等大型设备,能覆盖大部分复杂地形,适用性强,携带方便,能提高作业效率;借助无人机105携带轻质挂线辅助机器人上线,使机器人能够方便的从合适的位置上线,快速行走到安装位置,减少作业耗时。
29.实施例二:本实施例在实施例一的基础上,对挂线支架103作出了进一步的改进。如图7、图8所示,本实施例中,挂线支架103包括套管107、左挂杆106、右挂杆108、左齿条109、右齿条110、驱动齿轮114和驱动机构,左挂杆106与右挂杆108分别套接在套管107的左边和右边,左齿条109与左挂杆106固定连接,右齿条110与右挂杆108固定连接,驱动齿轮114与套管107转动连接,驱动机构与驱动齿轮114连接,左齿条109和右齿条110均与驱动齿轮114啮合,左挂杆106与第一挂线头102连接,右挂杆108与第二挂线头104连接。通过驱动机构带动驱动齿轮114转动,进而带动左齿条109和右齿条110移动,从而使得左挂杆106和右挂杆108伸出长度的变化,调整挂线支架103的长度,适应不同的机器人。
30.如图9、图10所示,驱动齿轮114包括摩擦杆112、摩擦轮113、固定轴117、驱动管
111、驱动弹簧115、锁定弹簧116和锁定环118,固定轴117与套管107固定连接,驱动齿轮114与固定轴117转动连接,摩擦轮113与驱动齿轮114同心固定连接,驱动管111与套管107固定连接,驱动弹簧115安装在驱动管111内,摩擦杆112一端套入驱动管111,驱动弹簧115一端与驱动管111固定连接,驱动弹簧115另一端与摩擦杆112固定连接,驱动弹簧115两端通过导线与电子开关k1和直流电源bt1连接,摩擦杆112与摩擦轮113抵接,摩擦轮113中空且远离驱动齿轮114的一端开口,摩擦轮113靠近驱动齿轮114的一端加工有锁定孔119,锁定环118套接在固定轴117上,固定轴117上设有卡条,锁定环118加工有卡槽,卡条和卡槽卡接,锁定环118加工有与锁定孔119匹配的突刺,锁定弹簧116一端与锁定环118固定连接,锁定弹簧116另一端与套管107固定连接,锁定弹簧116两端通过导线与电子开关k2和直流电源bt2连接。驱动弹簧115在通入电流时产生收缩,收缩量与通入的电流相关,通过电子开关k1的pwm控制实现调整驱动弹簧115通电电流的大小控制,从而控制驱动弹簧115的收缩量,同样通过电子开关k2的pwm控制实现锁定环118与锁定孔119的锁定或脱离,当驱动弹簧115收缩时带动摩擦杆112移动,从而带动摩擦轮113转动,即带动驱动齿轮114转动,当电子开关k1保持断开,驱动弹簧115伸长,摩擦轮113会反向转动,此时控制电子开关k2也断开,锁定弹簧116伸长使得锁定环118与锁定孔119锁紧,摩擦轮113因锁死而不能反向转动,即实现了驱动齿轮114沿一个方向转动。若使驱动齿轮114沿另一个方向转动,只需在驱动弹簧115收缩时锁定摩擦轮113,在驱动弹簧115伸长时解锁摩擦轮113。
31.如图11所示,第一挂线头102和第二挂线头104均加工有凹槽,凹槽内壁加工有缺口,左挂杆106以及右挂杆108末端均安装有挂接机构,挂接机构与凹槽连接,挂接机构包括挂接弹簧120、挂接头121和挂接球122,左挂杆106以及右挂杆108末端均加工有盲孔,盲孔的壁沿径向加工有通孔,挂接球122置入通孔内,挂接头121套入盲孔开口处,挂接弹簧120一端与盲孔底部固定连接,挂接弹簧120另一端与挂接头121连接,挂接弹簧120两端通过导线与电子开关k3和直流电源bt3连接,挂接头121与第一挂线头102及第二挂线头104的凹槽匹配,挂接头121与挂接头121抵接,挂接头121外壁具有将挂接球122挤出左挂杆106及右挂杆108外壁的锁紧部,挂接头121外壁还具有使得挂接球122缩回左挂杆106及右挂杆108外壁的容纳部。挂接弹簧120收缩时会拉动挂接头121上升,从而使得容纳部与挂接球122抵接,第一挂线头102和第二挂线头104在重力作用下将挂接球122挤入左挂杆106及右挂杆108,第一挂线头102和第二挂线头104随即脱落,坠落地面。
32.以上所述的实施例只是本发明的一种较佳的方案,并非对本发明作任何形式上的限制,在不超出权利要求所记载的技术方案的前提下还有其它的变体及改型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1