输入为可控整流的变桨伺服驱动器及其驱动方法与流程
1.本发明涉及风力发电技术领域,尤其涉及风力发电变桨系统使用的伺服驱动器及其驱动方法。
背景技术:
2.目前变桨伺服驱动器主流的整流电路是用6个二极管组成不可控的三相全桥整流桥,再经电容滤波后整流成相对稳定的直流电。整流后的直流电压udc和输入三相交流电压uac的关系为udc=√2*uac。由公式可以看出整流滤波后的直流母线电压udc和电网输入三相交流电压uac为线性关系,直流母线电压udc会随着输入三相交流电压uac的降低而降低或升高而升高,当直流母线电压udc高到驱动器设定的安全电压的上限时驱动器会报输入过压/母线过压故障并停止工作。由上可知,该电路的主要问题是整流后的直流母线电压udc不可控,当电网不稳时驱动器容易出现母线电压异常而报故障。
3.我国风电事业蓬勃发展,装机量稳步上升,为我国绿色能源的有效利用、碧水蓝天及可持续发展的实现都做出了重要贡献。但是,风力发电机组大多数安装在自然条件恶劣的偏远地区尤其是山区,这些偏远地区的电网普遍存在电网不稳和电能质量不高的问题。变桨系统是风力发电机组的重要组成部分,而伺服驱动器又是变桨的核心部件。目前的变桨驱动器输入整流大多是不可控的,当电网电压波动太大或者谐波污染比较严重的时候,驱动器的母线电压会出现超出正常电压范围的情况,驱动器出现频繁报输入过压/母线过压的故障,不仅影响正常发电而且还会有安全隐患。基于这个原因,急需开发一款输入为可控整流的变桨伺服驱动器,以解决此问题。
技术实现要素:
4.鉴于目前现有技术的不足,本发明的目的在于提供一种安全性较高的输入为可控整流的变桨伺服驱动器及其驱动方法。
5.为达到上述目的,本发明的实施例采用如下技术方案:一种输入为可控整流的变桨伺服驱动器,所述驱动器包括三相交流电检测单元、可控整流模块、上电缓冲单元、辅助电源、控制单元以及储能电容,所述三相交流电检测单元、可控整流模块、上电缓冲单元的输入端均与三相交流电相连,所述上电缓冲单元的输出端与所述可控整流模块的输出端相连,所述可控整流模块的输出端与所述储能电容相连并进而与所述辅助电源的输入端相连,所述辅助电源的输出端与所述控制单元的电源输入端相连,所述控制单元与所述可控整流模块相连,提供整流控制信号,所述控制单元还与所述上电缓冲单元相连,提供延迟开关信号,所述控制单元还与所述三相交流电检测单元相连,接受所述三相交流电检测单元提供的三相交流电检测信号。
6.进一步,所述可控整流模块包括整流桥,所述整流桥的下桥臂为三个不可控二极管,所述整流桥的上桥臂为三个可控硅,分别接受所述控制单元提供的整流控制信号。
7.进一步,所述上电缓冲单元包括三个二极管、第一电阻及可控开关,所述三个二极
管的正极分别与三相交流电相连,所述三个二极管的负极均与所述第一电阻的第一端相连,所述第一电阻的第二端与所述可控开关的第一端相连,所述可控开关的第二端与所述可控整流模块相连,所述可控开关还具有一信号输入端,接受所述延迟开关信号,所述可控开关是常闭状态。
8.进一步,所述储能电容并联于所述可控整流模块的输出端的两端。
9.进一步,所述控制单元还通过直流母线电压检测单元与所述可控整流模块的输出端相连,检测所述可控整流模块输出的直流母线电压。
10.一种输入为可控整流的变桨伺服驱动器的驱动方法,采用如前所述的驱动器,所述驱动方法包括如下步骤:步骤s1,接通三相交流电,三相交流电经过所述上电缓冲单元和可控整流模块构成闭合回路,所述可控整流模块输出的直流母线电压和所述储能电容得电上升;步骤s2,当所述直流母线电压达到所述辅助电源最低工作电压以上时,所述辅助电源开始工作输出所述控制单元和三相交流电检测单元需要的低压直流电压;步骤s3,所述控制单元和三相交流电检测单元得到需要的低压直流电压开始工作;步骤s4,所述控制单元根据所述三相交流电检测单元提供到的三相交流电检测信号输出整流控制信号驱动所述可控整流模块正常工作,所述可控整流模块开始给系统供电;步骤s5,所述控制单元输出延迟开关信号控制所述上电缓冲单元与所述可控整流模块断开;步骤s6,所述控制单元通过所述三相交流电检测单元实时提供的三相交流电检测信号实时调整所述整流控制信号,使所述可控整流模块输出稳定的直流母线电压;步骤s7,当出现无法将所述直流母线电压稳定在正常的范围内时,则所述控制单元通过所述整流控制信号控制所述可控整流模块关断,同时控制所述驱动器停止输出报过压故障,随后输出所述延迟开关信号控制所述上电缓冲单元接通到所述可控整流模块上,重复步骤s2
‑
步骤s6。
11.进一步,所述可控整流模块包括整流桥,所述整流桥的下桥臂为三个不可控二极管,所述整流桥的上桥臂为三个可控硅,分别接受所述控制单元提供的整流控制信号;所述步骤s1中,所述上电缓冲单元和可控整流模块构成闭合回路,是所述上电缓冲单元和可控整流模块中整流桥的下桥臂构成闭合回路;所述步骤s7中,所述上电缓冲单元接通到所述可控整流模块上,是所述上电缓冲单元和可控整流模块中整流桥的下桥臂连通。
12.进一步,所述上电缓冲单元包括三个二极管、第一电阻及可控开关,所述三个二极管的正极分别与三相交流电相连,所述三个二极管的负极均与所述第一电阻的第一端相连,所述第一电阻的第二端与所述可控开关的第一端相连,所述可控开关的第二端与所述可控整流模块相连,所述可控开关还具有一信号输入端,接受所述延迟开关信号,所述可控开关是常闭状态。
13.进一步,所述三相交流电检测信号包括三相交流电电压、相位角;所述整流控制信号用于控制所述整流桥导通的相位角。
14.进一步,所述控制单元还通过直流母线电压检测单元与所述可控整流模块的输出
端相连,检测所述可控整流模块输出的所述直流母线电压,生成所述整流控制信号。
15.本发明所述一种输入为可控整流的变桨伺服驱动器及其驱动方法,其整流桥采用可控硅,而且通过与上电缓冲单元和辅助电源的配合,在直流母线电压超出正常范围时,关断整流桥,并且停止输出报过压故障(即不报故障),藉由上电缓冲单元和辅助电源的暂时供电,让系统再慢慢恢复正常,再开启整流桥正常工作。与不可控的二极管整流电路相比可控整流的直流母线电压比较稳定,有利于驱动器输出的稳定控制;而且增加了驱动器对电网的适应能力,可减少电网不稳定造成的驱动器故障率,提高了安全性,同时增加发电时间减少损失。
附图说明
16.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
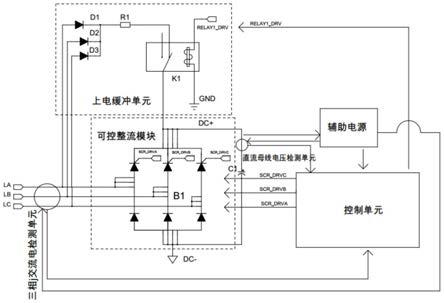
17.图1为本发明一实施方式一种输入为可控整流的变桨伺服驱动器的结构框图;图2为本发明一实施方式一种输入为可控整流的变桨伺服驱动器的驱动方法的流程示意图。
具体实施方式
18.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
19.请参见图1所示,本发明一实施方式一种输入为可控整流的变桨伺服驱动器,所述驱动器包括三相交流电检测单元、可控整流模块、上电缓冲单元、辅助电源、控制单元以及储能电容,所述三相交流电检测单元、可控整流模块、上电缓冲单元的输入端均与三相交流电相连,所述上电缓冲单元的输出端与所述可控整流模块的输出端相连,所述可控整流模块的输出端与所述储能电容相连并进而与所述辅助电源的输入端相连,所述辅助电源的输出端与所述控制单元的电源输入端相连,所述控制单元与所述可控整流模块相连,提供整流控制信号,所述控制单元还与所述上电缓冲单元相连,提供延迟开关信号,所述控制单元还与所述三相交流电检测单元相连,接受所述三相交流电检测单元提供的三相交流电检测信号。
20.其中,所述可控整流模块包括整流桥b1,所述整流桥b1的下桥臂为三个不可控二极管,所述整流桥b1的上桥臂为三个可控硅,分别接受所述控制单元提供的整流控制信号scr_drva、scr_drvb、scr_drvc。
21.所述上电缓冲单元包括三个二极管d1、d2、d3、第一电阻r1及可控开关k1,所述三个二极管d1、d2、d3的正极分别与三相交流电la、lb、lc相连,所述三个二极管d1、d2、d3的负极均与所述第一电阻r1的第一端相连,所述第一电阻r1的第二端与所述可控开关k1的第一端相连,所述可控开关k1的第二端与所述可控整流模块相连,所述可控开关k1还具有一信
号输入端,接受所述延迟开关信号relay1_drv,所述可控开关k1是常闭状态。当然,所述可控开关k1还具有一接地端gnd。
22.所述储能电容c1并联于所述可控整流模块的输出端的两端dc+、dc
‑
。
23.所述控制单元还通过直流母线电压检测单元与所述可控整流模块的输出端相连,检测所述可控整流模块输出的直流母线电压dc+。当然,所述直流母线电压检测单元也与所述辅助电源相连,由所述辅助电源提供工作电压。
24.请参见图2所示,本发明一实施方式一种输入为可控整流的变桨伺服驱动器的驱动方法,采用如前所述的驱动器,所述驱动方法包括如下步骤:步骤s1,接通三相交流电,三相交流电经过所述上电缓冲单元和可控整流模块构成闭合回路,所述可控整流模块输出的直流母线电压和所述储能电容得电上升;步骤s2,当所述直流母线电压达到所述辅助电源最低工作电压以上时,所述辅助电源开始工作输出所述控制单元和三相交流电检测单元需要的低压直流电压;步骤s3,所述控制单元和三相交流电检测单元得到需要的低压直流电压开始工作;步骤s4,所述控制单元根据所述三相交流电检测单元提供到的三相交流电检测信号输出整流控制信号驱动所述可控整流模块正常工作,所述可控整流模块开始给系统供电;步骤s5,所述控制单元输出延迟开关信号控制所述上电缓冲单元与所述可控整流模块断开;步骤s6,所述控制单元通过所述三相交流电检测单元实时提供的三相交流电检测信号实时调整所述整流控制信号,使所述可控整流模块输出稳定的直流母线电压;步骤s7,当出现无法将所述直流母线电压稳定在正常的范围内时,则所述控制单元通过所述整流控制信号控制所述可控整流模块关断,同时控制所述驱动器停止输出报过压故障,随后输出所述延迟开关信号控制所述上电缓冲单元接通到所述可控整流模块上,重复步骤s2
‑
步骤s6。
25.其中,所述可控整流模块包括整流桥b1,所述整流桥b1的下桥臂为三个不可控二极管,所述整流桥b1的上桥臂为三个可控硅,分别接受所述控制单元提供的整流控制信号scr_drva、scr_drvb、scr_drvc;所述步骤s1中,所述上电缓冲单元和可控整流模块构成闭合回路,是所述上电缓冲单元和可控整流模块中整流桥b1的下桥臂构成闭合回路;所述步骤s7中,所述上电缓冲单元接通到所述可控整流模块上,是所述上电缓冲单元和可控整流模块中整流桥b1的下桥臂连通。
26.所述上电缓冲单元包括三个二极管d1、d2、d3、第一电阻r1及可控开关k1,所述三个二极管d1、d2、d3的正极分别与三相交流电la、lb、lc相连,所述三个二极管d1、d2、d3的负极均与所述第一电阻r1的第一端相连,所述第一电阻r1的第二端与所述可控开关k1的第一端相连,所述可控开关k1的第二端与所述可控整流模块相连,所述可控开关k1还具有一信号输入端,接受所述延迟开关信号relay1_drv,所述可控开关k1是常闭状态。当然,所述可控开关k1还具有一接地端gnd。
27.所述三相交流电检测信号包括三相交流电电压、相位角;所述整流控制信号用于控制所述整流桥b1导通的相位角。
28.所述控制单元还通过直流母线电压检测单元与所述可控整流模块的输出端相连,检测所述可控整流模块输出的所述直流母线电压dc+,生成所述整流控制信号。
29.本发明一种输入为可控整流的变桨伺服驱动器及其驱动方法,其整流桥采用可控硅,而且通过与上电缓冲单元和辅助电源的配合,在直流母线电压超出正常范围时,关断整流桥,并且停止输出报过压故障(即不报故障),藉由上电缓冲单元和辅助电源的暂时供电,让系统再慢慢恢复正常,再开启整流桥正常工作。与不可控的二极管整流电路相比可控整流的直流母线电压比较稳定,有利于驱动器输出的稳定控制;而且增加了驱动器对电网的适应能力,可减少电网不稳定造成的驱动器故障率,提高了安全性,同时增加发电时间减少损失。
30.以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本领域技术的技术人员在本发明公开的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以所述权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1