一种机器人对准充电装置的制作方法
[0001]
本实用新型涉及机器人技术领域,具体涉及一种机器人对准充电装置。
背景技术:
[0002]
随着机器人技术的快速发展,因其操作简单,高效,成本低廉等优点,使得机器人具有很大的应用价值和发展前景。为保证机器人的正常运转,往往需要对机器人进行时不时的、不间断的充电。
[0003]
现有机器人充电,需要做一些比较精确的图像识别,才能对准充电口。但是,精确的图像识别对摄像头和算法要求比较高,增加了机器人的研发成本,不利于机器人的推广使用。而且,如果机器人的定位不精确,进行移动对准充电时,机器人上的电极与充电桩的电极对接不会很好,必然影响充电效果,也不利于设备的维护。
技术实现要素:
[0004]
为解决上述技术问题,本实用新型设计了一种采用纯物理的对准方法进行充电的机器人对准充电装置,以有效降低机器人的对准充电成本。
[0005]
具体方案如下:
[0006]
本实用新型提供了一种机器人对准充电装置,包括机器人充电头、充电桩本体,所述机器人充电头插入所述充电桩本体进行充电,所述机器人充电头设有第一电极,所述第一电极包括第一公电极、第一母电极,所述充电桩本体设有第二电极,所述第二电极包括第二公电极、第二母电极,充电时,所述第一公电极与所述第二母电极接触导通,所述第一母电极与所述第二公电极接触导通;所述机器人充电头在面对所述充电桩本体的方向设有锥形导向部,所述充电桩本体在面对所述机器人充电头的方向设有凹陷的倒锥形限位部,且所述倒锥形限位部的形状、尺寸与所述锥形导向部相匹配,使得所述锥形导向部可以插入所述倒锥形限位部,以实现所述第一电极与所述第二电极的接触导通。
[0007]
进一步的,所述锥形导向部的张角明显大于所述倒锥形限位部的张角。
[0008]
进一步的,所述锥形导向部是在所述第一电极两侧对称设置的锥形机构。
[0009]
进一步的,所述锥形导向部的内部设有弹性材料,且所述锥形导向部被软皮包裹。
[0010]
进一步的,所述弹性材料为海绵。
[0011]
进一步的,所述锥形导向部可拆卸。
[0012]
进一步的,所述倒锥形限位部是设置在所述充电桩本体凹陷的倒锥形限位机构,且所述第二电极设置于所述倒锥形限位机构的底部中央。
[0013]
进一步的,机器人的摄像头设置在与所述第一公电极、所述第一母电极的中心在一条垂直线上。
[0014]
有益效果:
[0015]
1.本实用新型采用锥形导向部插入倒锥形限位部的设计,可以实现在机器人移动前进时的对准校准,以保证机器人的笔直前进,直接闭合接电,不需要进行反复调整。
[0016]
2.本实用新型易维护,可能会磨损的锥形导向部可更换,成本低,适于推广使用。
附图说明
[0017]
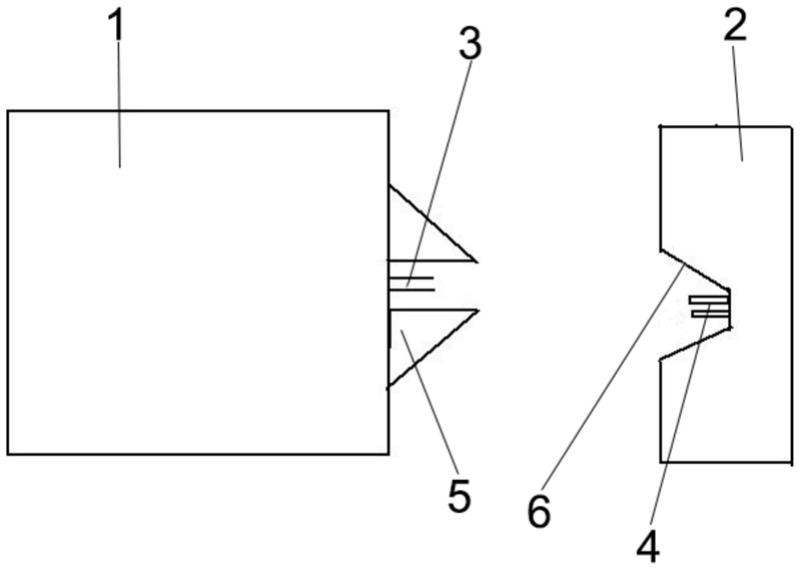
图1是实用新型的结构框架示意图。
[0018]
其中,1-机器人充电头,2-充电桩本体,3-第一电极,4-第二电极,5-锥形导向部,6-倒锥形限位部。
具体实施方式
[0019]
为进一步说明各实施例,本实用新型提供有附图。这些附图为本实用新型揭露内容的一部分,其主要用以说明实施例,并可配合说明书的相关描述来解释实施例的运作原理。配合参考这些内容,本领域普通技术人员应能理解其他可能的实施方式以及本实用新型的优点。图中的组件并未按比例绘制,而类似的组件符号通常用来表示类似的组件。
[0020]
现结合附图和具体实施方式对本实用新型进一步说明。
[0021]
本实用新型提供了一种机器人对准充电装置,包括机器人充电头1、充电桩本体2,所述机器人充电头1插入所述充电桩本体2进行充电。
[0022]
具体的,所述机器人充电头1设有第一电极3,所述第一电极3包括第一公电极、第一母电极,所述充电桩本体2设有第二电极4,所述第二电极4包括第二公电极、第二母电极。其中,第一公电极、第一母电极的位置可以对调,第二公电极、第二母电极的位置可以对调。充电时,所述第一公电极与所述第二母电极接触导通,所述第一母电极与所述第二公电极接触导通,开始充电。
[0023]
本实用新型的机器人充电头1在面对所述充电桩本体2的方向设有锥形导向部5,所述充电桩本体2在面对所述机器人充电头1的方向设有凹陷的倒锥形限位部6,且所述倒锥形限位部6的形状、尺寸与所述锥形导向部5相匹配,使得所述锥形导向部5可以插入所述倒锥形限位部6,以实现所述第一电极3与所述第二电极4的接触导通,开始充电。
[0024]
作为本实用新型的一个优选方案,所述锥形导向部5的张角明显大于所述倒锥形限位部6的张角,从而使得所述锥形导向部5会受到所述倒锥形限位部6的挤压而往中间缩,从而调整、较对机器人的移动轨迹。
[0025]
作为本实用新型的另一个优选方案,所述锥形导向部5是在所述第一电极3两侧对称设置的锥形机构,并且所述锥形导向部5的内部设有弹性材料,如海绵等,以实现挤压后的弹性变化。并且,所述锥形导向部5被耐磨的软皮包裹,以增加使用期限。
[0026]
此外,长期使用后,锥形导向部5多多少少会发生变形,从而造成对准不准确,为避免该情况发生,本实用新型的锥形导向部5为可拆卸连接,在使用一段时间后,就可以对该锥形导向部5进行替换。
[0027]
作为本实用新型的另一个优选方案,所述倒锥形限位部6是设置在所述充电桩本体2凹陷的倒锥形限位机构,且所述第二电极4设置于所述倒锥形限位机构的底部中央。
[0028]
作为本实用新型的另一个优选方案,机器人的摄像头设置在与所述第一公电极、所述第一母电极的中心在一条垂直线上。当机器人要充电时,机器人移动,使得第二电极4位于摄像头的垂直中心,机器人沿着该垂直线笔直前进时,就可以实现对准充电。
[0029]
本实用新型的使用原理:
[0030]
使用本实用新型,包括以下步骤:
[0031]
(1)当机器人要充电时,机器人移动,使得第二电极位于摄像头的垂直中心,机器人直行前进;
[0032]
(2)当机器人的锥形导向部碰到充电桩本体的倒锥形限位部时,由于所述锥形导向部的张角大于所述倒锥形限位部的张角,所述锥形导向部被挤压往中间缩,机器人保持笔直前进;
[0033]
(3)当第一电极与第二电极正对时,机器人继续保持笔直前进,所述第一电极与所述第二电极接触导通,开始充电;
[0034]
当第一电极与第二电极没有正对时,即机器人发生了倾斜,则机器人的锥形导向部会受到来自倾斜一侧的弹性材料的较大反作用力,从而纠正前进路线,最终使第一电极与第二电极正对,机器人继续前进,所述第一电极与所述第二电极接触导通,开始充电。
[0035]
本实用新型可以实现在机器人移动前进时的对准校准,以保证机器人的笔直前进,直接闭合接电,不需要进行反复调整。
[0036]
尽管结合优选实施方案具体展示和介绍了本实用新型,但所属领域的技术人员应该明白,在不脱离所附权利要求书所限定的本实用新型的精神和范围内,在形式上和细节上可以对本实用新型做出各种变化,均为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1