一种电调板的制作方法
[0001]
本实用新型涉及无人机电调板领域,尤其是一种电调板。
背景技术:
[0002]
目前,无人机越来越趋于小型化和集成化,因空间限制,电调板也必须小型集成化,而在很多电调板的mos管驱动电路中,采用专门的驱动芯片来对mos管的开关进行控制,以达到快速导通、关断的目的。但是,以往电调板由驱动芯片加六个单独设置的mos管,这样搭建的电桥很难把电调板做小,不能满足电调板小型集成化的要求。
技术实现要素:
[0003]
为了解决上述问题,本实用新型提出一种电调板。
[0004]
本实用新型通过以下技术方案实现的:
[0005]
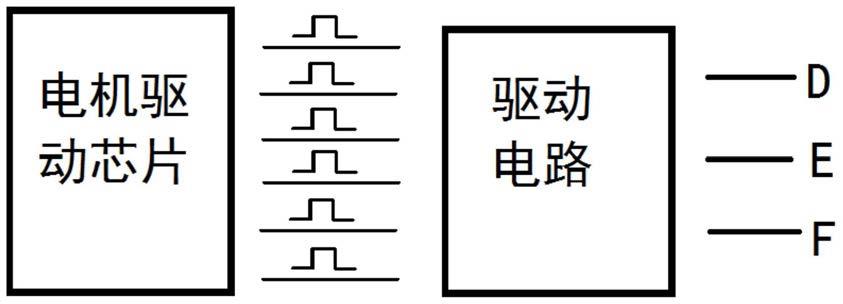
本实用新型提出一种电调板,包括电机驱动芯片和驱动电路,所述电机驱动芯片发送pwm脉宽调制信号给所述驱动电路,所述驱动电路用于控制电机的启动和调速;
[0006]
其中,所述驱动电路包括mos管q1、mos管q2、mos管q2、mos管q3、mos管q4、mos管q5、mos管q6和三相电路,所述三相电路包括a相、b相、c相。
[0007]
所述a相输入端连接在所述mos管q1和mos管q6之间,所述a相输出端与所述b相、所述c相并联。
[0008]
所述b相输入端与所述a相、所述c相并联,所述b相输出端连接在所述mos管q3和mos管q4之间。
[0009]
所述c相输入端与所述a相、所述b相并联,所述c相输出端连接在所述mos管q2和mos管q5之间。
[0010]
进一步地,所述mos管q1的d级连接vdd端,所述mos管q1的s级分别连接所述mos管q2的d级和所述a相的输入端。
[0011]
进一步地,所述mos管q3的d级连接vdd端,所述mos管q3的s级分别连接所述mos管q4的d级和所述b相的输出端。
[0012]
进一步地,所述mos管q5的d级连接vdd端,所述mos管q5的s级分别连接所述mos管q2的d级和所述c相的输出端。
[0013]
进一步地,所述mos管q6的d级分别连接所述mos管q1的s级和所述a相的输入端,所述mos管q6的s级连接vss端。
[0014]
进一步地,所述mos管q4的d级分别连接所述mos管q3的s级和所述b相的输出端,所述mos管q4的s级连接vss端。
[0015]
进一步地,所述mos管q2的d级分别连接所述mos管q5的s级和所述c相的输出端,所述mos管q5的s级连接vss端。
[0016]
本实用新型的有益效果:本实用新型的电调板包括电机驱动芯片、驱动电路和三相电路,所述电机驱动芯片发送pwm脉宽调制信号给所述驱动电路,所述驱动电路用于控制
电机的启动和调速;本实用新型的所述驱动电路由mos管q1、mos管q2、mos管q2、mos管q3、mos管q4、mos管q5、mos管q6和三相电路高度集成,所述三相电路包括a相、b相、c相,所述a相输入端连接在所述mos管q1和mos管q6之间,所述b相输出端连接在所述mos管q3和mos管q4之间;所述c相输出端连接在所述mos管q2和mos管q5之间。本实用新型利用电机驱动芯片加上高度集成的驱动电路,将所述电调板做得更小型集成化,进而适应无人机小型化发展。
附图说明
[0017]
图1为所述电调板的电路图示意图;
[0018]
图2为所述驱动电路的简化图;
[0019]
图3为所述驱动电路的示意图
[0020]
图4为所述驱动电路的电路图;
[0021]
图5为所述电机驱动芯片的电路图;
[0022]
图6为所述电路d的电路图;
[0023]
图7为所述电路e的电路图;
[0024]
图8为所述电路f的电路图。
具体实施方式
[0025]
为了更加清楚、完整的说明本实用新型的技术方案,下面结合附图对本实用新型作进一步说明。
[0026]
请参考图1—图8,本实用新型提出一种电调板,包括电机驱动芯片和驱动电路,所述电机驱动芯片发送pwm脉宽调制信号给所述驱动电路,所述驱动电路用于控制电机的启动和调速;
[0027]
其中,所述驱动电路包括mos管q1、mos管q2、mos管q2、mos管q3、mos管q4、mos管q5、mos管q6和三相电路,所述三相电路包括a相、b相、c相。
[0028]
所述a相输入端连接在所述mos管q1和mos管q6之间,所述a相输出端与所述b相、所述c相并联。
[0029]
所述b相输入端与所述a相、所述c相并联,所述b相输出端连接在所述mos管q3和mos管q4之间。
[0030]
所述c相输入端与所述a相、所述b相并联,所述c相输出端连接在所述mos管q2和mos管q5之间。
[0031]
进一步地,所述mos管q1的d级连接vdd端,所述mos管q1的s级分别连接所述mos管q2的d级和所述a相的输入端。
[0032]
进一步地,所述mos管q3的d级连接vdd端,所述mos管q3的s级分别连接所述mos管q4的d级和所述b相的输出端。
[0033]
进一步地,所述mos管q5的d级连接vdd端,所述mos管q5的s级分别连接所述mos管q2的d级和所述c相的输出端。
[0034]
进一步地,所述mos管q6的d级分别连接所述mos管q1的s级和所述a相的输入端,所述mos管q6的s级连接vss端。
[0035]
进一步地,所述mos管q4的d级分别连接所述mos管q3的s级和所述b相的输出端,所
述mos管q4的s级连接vss端。
[0036]
进一步地,所述mos管q2的d级分别连接所述mos管q5的s级和所述c相的输出端,所述mos管q5的s级连接vss端。
[0037]
本实用新型的所述驱动电路由mos管q1、mos管q2、mos管q2、mos管q3、mos管q4、mos管q5、mos管q6和三相电路高度集成,所述三相电路包括a相、b相、c相,所述a相输入端连接在所述mos管q1和mos管q6之间,所述b相输出端连接在所述mos管q3和mos管q4之间;所述c相输出端连接在所述mos管q2和mos管q5之间。本实用新型利用电机驱动芯片加上高度集成的驱动电路,将所述电调板做得更小型集成化,进而适应无人机小型化发展。
[0038]
请参考2和图3,电机驱动芯片给mos管q1、mos管q4高电平,则mos管q1、mos管q4打开;电机驱动芯片给mos管q3、mos管q5、mos管q2、mos管q6低电平,则mos管q3、mos管q5、mos管q2、mos管q6关闭,进而实现了a相与b相导通,如图3。
[0039]
同理,如果需要b相与c相导通,则电机驱动芯片给mos管q3、mos管q2高电平,mos管q3、mos管q2打开;电机驱动芯片给mos管q1、mos管q4、mos管q5、mos管q6低电平,mos管q1、mos管q4、mos管q5、mos管q6关闭,则实现b相、c相导通。
[0040]
同理,如果需要c相与a相导通,则电机驱动芯片给mos管q1、mos管q2高电平,mos管q5、mos管q6打开,电机驱动芯片给mos管q3、mos管q4、mos管q5、mos管q6低电平,mos管q3、mos管q4、mos管q5、mos管q6关闭,则实现c相与a相导通。
[0041]
在本实施例中,所述电机驱动芯片的型号为fu6818,所述驱动电路的型号为pc30088h。电机驱动芯片通过发送pwm脉宽调制信号到驱动电路,进而能够轮流的打开ab
→
bc
→
ca相,进而使得电机(或马达)启动,再通过调节pwm脉宽调制信号的频率和占空比就可以调节电机(或马达)的转速。
[0042]
脉冲宽度调制是一种模拟控制方式,其根据相应载荷的变化来调制晶体管基极或mos管栅极的偏置,来实现晶体管或mos管导通时间的改变,从而实现开关稳压电源输出的改变。
[0043]
在本实施例中,通过改变pwm脉宽调制信号的周期可以调频,改变pwm脉宽调制信号的宽度或占空比可以调压,采用适当控制方法即可使电压与频率协调变化。在本实施例中,电机驱动芯片发送pwm脉宽调制信号能够控制驱动电路中的6个mos管轮流开关,进而达到驱动无刷电机(或马达)的启动和调速。
[0044]
优选地,所述电机驱动芯片输入正脉冲信号至所述驱动电路:间隔5~20ms,脉冲宽度1.000~1.610ms,脉冲宽度达到1.160ms时,电机(或马达)开始启动,脉冲宽度达到1.810ms时,电机(或马达)为最高速度,分辨率为2us。
[0045]
在本实施例中,所述电调板还包括电路d、电路e、电路f,所述电路d、电路e与电路f均连接与所述驱动电路连接。所述电调板还包括电路d、电路e、电路f为外围电路。
[0046]
在本实施例中,所述电调板可以使用4个所述驱动芯片和4个驱动电路来实现对无人机内4个无刷马达的驱动。
[0047]
当然,本实用新型还可有其它多种实施方式,基于本实施方式,本领域的普通技术人员在没有做出任何创造性劳动的前提下所获得其他实施方式,都属于本实用新型所保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1