用于磁悬浮装置的旋转升降机构的制作方法
1.本实用新型总体涉及磁悬浮装置。
背景技术:
2.现有的磁悬浮装置,例如磁悬浮台灯、音箱或地球仪等,一般都包括磁悬浮基座(基体)和悬浮体。基座和悬浮体都包含有磁体,基座内的磁体通过磁性作用(例如磁斥力)能够将悬浮体悬浮在其上方预定距离处,产生漂浮的奇幻视觉效果,从而深受人们的喜爱。
3.但在现有的磁悬浮装置的悬浮实现过程中,通常需要将悬浮体相对于基座手动放置到合适的悬浮位置,才能实现悬浮体的稳定漂浮。对于初始(经验不足)使用者而言,手动寻找合适悬浮位置的过程会显得困难和漫长,并可能会因此失去耐心和兴趣。
4.申请人的专利文件wo2016/202187a1、cn104901587a、cn204687868u、cn205666775u、cn211352080u等公开的磁悬浮装置包括底座和悬浮体,其中底座包含磁悬浮机构和升降器,具有环形磁铁的磁悬浮机构置于升降器上并随之升降从而实现悬浮体相对底座的自动悬浮或落下。此外,专利文件cn102315805a、cn207202600u、cn102570927a等也公开了类似的用于磁悬浮装置的自动升降机构。此类升降机构虽然能够实现悬浮体的自动悬浮,但装置高度或厚度过于增加,从而带来不便。此外,这类升降机构更无法控制悬浮体与底座的相对位置关系。
技术实现要素:
5.本实用新型的目的是提供一种用于磁悬浮装置的旋转升降机构,其能够更加便捷地控制悬浮体的自动悬浮升降过程。
6.本申请中,术语“基础模块”、“基体”或“基座”是指这样一种功能化模块,其和悬浮体分别设置有能够相互作用以提供平衡磁场的磁组件,此外,其还具有控制器和其它相关电磁元件等以能够实时控制悬浮体相对其处于平衡悬浮位置。另外,术语“磁体”与“磁铁”具有同等含义,均指形成有n和s极的磁性部件,可单独构成或组合形成“磁组件”。
7.根据本实用新型,提供了一种用于磁悬浮装置的旋转升降机构,其中磁悬浮装置包括悬浮体和用于使悬浮体相对其稳定悬浮的基础模块,该旋转升降机构包括:
8.具有圆周壁的旋转筒,其中旋转筒的圆周壁上设置有高度变化的周向导槽,并且旋转筒固定连接有导轴,导轴平行于旋转筒的轴向(旋转轴线方向);
9.具有圆周壁的升降筒,位于旋转筒内,其中升降筒的圆周壁上设置有高度变化的周向导槽以及插入旋转筒的周向导槽的径向滚头;以及
10.旋转升降支架,位于升降筒内,用于携载磁悬浮装置的基础模块,其中旋转升降支架设置有插入升降筒的周向导槽的径向滚头,旋转升降支架设置成沿旋转筒的导轴是可滑动的且能够随其一起转动。
11.根据本实用新型的旋转升降机构,还可以包括壳体,其中旋转筒可转动但不可线性移动地设置在壳体内,升降筒可线性(竖向)移动但不可转动地设置在壳体内。
12.在本实用新型的一个具体实施例中,升降筒的顶部还可以设置有定位托板,用于初始定位磁悬浮装置的悬浮体。悬浮体可以例如为蓝牙音箱,当升降筒位于初始低位时,蓝牙音箱至少部分位于壳体中。
13.在本实用新型的另一个具体实施例中,旋转筒通过轴承可旋转地固定在壳体的底部,壳体内壁设置有线性(竖向)导槽,升降筒的径向滚头插入通过旋转筒的周向导槽后再进入壳体内壁上的线性导槽。优选采用固定在壳体上的双向步进电机驱动旋转筒相应旋转。步进电机每次顺时针转动特定转数,与逆时针转动的转数相等;电机顺时针和逆时针分别转动一次则完成旋转升降支架的一次完整旋转升降过程。
14.根据本实用新型的优选实施例,旋转筒的周向导槽可以包括下部倾斜段(高度渐变段)和上部水平段,升降筒的周向导槽则可以包括下部水平段和上部倾斜段(高度渐变段)。在进一步优选实施例中,旋转筒的周向导槽的下部倾斜段所对应的圆周弧度基本等于升降筒的周向导槽的下部水平段所对应的圆周弧度,旋转筒的周向导槽的上部水平段所对应的圆周弧度基本等于升降筒的周向导槽的上部倾斜段所对应的圆周弧度。电机每次顺时针或逆时针转动的特定转数对应于旋转筒或升降筒的单个周向导槽所覆盖的圆周弧度。
15.根据本实用新型的优选实施例,至少一个周向导槽均匀分布在旋转筒的圆周壁上,至少一个径向滚头均匀分布在升降筒的外圆周壁上,二者数量一致(优选三个以上)。
16.根据本实用新型的优选实施例,至少一个周向导槽均匀分布在升降筒的圆周壁上,至少一个径向滚头均匀分布在旋转升降支架的外周上,二者数量一致(优选三个以上)。
17.根据本实用新型的另一方面,还提供了一种磁悬浮装置,其包括上述升降机构。
18.本领域技术人员应当理解,本实用新型不同实施例之间可以互相引入彼此的特征或特征组合,除非明显不适用。
19.本实用新型无需轴向或竖向的螺旋举升机构,从而能够最小化装置尺寸尤其是高度或厚度。另外,由于升降筒的周围引导作用,旋转升降支架的旋转升降也更加平稳。此外,本实用新型的升降机构将旋转筒、升降筒和旋转升降支架巧妙组合,只需通过驱动旋转筒旋转,即可实现旋转升降支架的复合旋转升降运动,从而实现独特新奇的视觉效果。
附图说明
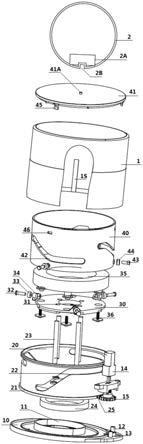
20.图1为根据本实用新型的磁悬浮装置的透视分解示意图。
具体实施方式
21.下面结合实施例和附图对本实用新型做进一步说明,本领域技术人员应该理解,实施例和附图只是为了更好地理解本实用新型,并不用来作任何限制。
22.本实用新型的磁悬浮装置的具体结构和工作原理可参见申请人之前的专利cn1819436b(在此以参见方式引入其全文),其包括基础模块(又可以称作“基体”或“基座”)以及能够在其上方稳定悬浮的悬浮体例如地球仪。基础模块和悬浮体分别设置有能够相互作用以提供平衡磁场的磁组件,控制器和其它相关电磁元件等也设置在基础模块或壳体内以实时控制悬浮体相对壳体处于平衡悬浮位置。
23.图1示出了根据本实用新型的第一实施例的磁悬浮装置的透视分解示意图,其包括壳体1和悬浮于其上方的悬浮体2。悬浮体2设置有例如柱形磁铁2a。
24.如图1所示,本实用新型的升降机构位于壳体1内,包括固定底板10、旋转筒20、旋转升降支架30以及升降筒40。基础模块35通过例如紧固件36等固定设置在旋转升降支架30上,包括例如电路板、环形磁铁(图示可见)、电磁线圈以及控制器等。
25.固定底板10位于壳体1底部,包括大致位于中央的轴承安装部11和位于较外侧的电机安装部12以及齿轮安装部13。
26.旋转筒20为圆柱筒形式,底部具有安装底盘21。旋转筒20的圆周壁上设置有高度变化的多个周向导槽22。图示3个导槽22分布均匀且形状一致,均具有下部倾斜段和上部水平段。安装底盘21上固定有多个(图示为4个)竖向导轴23,均匀分布在旋转筒20内并向上伸出旋转筒20。安装底盘21通过位于固定底板10的轴承安装部11中的轴承24可旋转地安装在固定底板10上。安装底盘21的至少一部分外周缘设置有减速齿轮结构25,用于配合固定底板10的齿轮安装部13中所安装的驱动齿轮15。
27.电机14竖向安装在固定底板10的电机安装部12中,其驱动轴下端固定安装驱动齿轮15。电机14为双向步进电机,从而能够驱动旋转筒20左右旋转特定转数。
28.旋转升降支架30设置为圆盘形状,设置有多个(图示为4个)穿孔31。旋转升降支架30沿其外圆周设置有多个(图示为3个)水平径向伸出的滚轴或滚头32。滚头32上还安装有滚轮33,并通过其螺纹端旋入滚头螺纹座34中而固定在旋转升降支架30上。旋转筒20的导轴23分别穿过旋转升降支架30的相应穿孔31。这样,旋转升降支架30随旋转筒20一起转动的同时还可以沿导轴23上下滑动。
29.升降筒40也为圆柱筒形式,顶部具有托板41。升降筒40的圆周壁上设置有高度变化的多个周向导槽42。图示的3个导槽42分布均匀且形状一致,均具有下部水平段和上部倾斜段。旋转升降支架30装配在升降筒40内,滚头32及其上的滚轮33分别伸入相应的导槽42中。
30.升降筒40沿外筒壁设置有多个(图示为3个)水平径向伸出的滚轴或滚头43,位于导槽42的下部水平段之下。滚头43上也安装有滚轮44,并通过其螺纹端旋入升降筒40的筒壁。升降筒40装配在旋转筒20内,滚头43及其上的滚轮44分别伸入相应的导槽22中。
31.为了便于观察起见,图1所示壳体1的部分圆周壁被去除。如图所示,壳体1的内壁设置有竖向导槽1s,升降筒40的滚头43插入通过旋转筒20的周向导槽22后再进入壳体1内壁上的竖向导槽1s。导槽1s的数量可以对应于升降筒40的滚头43的数量。
32.托板41的下外缘设置有卡扣突起45,升降筒40的上部筒壁上设置有卡扣凹口46,卡扣突起45与卡扣凹口46形成卡接配合。托板41上表面还设置有定位凸起41a以用于初始定位悬浮体2,例如突入悬浮体2上对应设置的凹口2b内。
33.以下简单描述本实用新型的升降机构的工作原理。
34.先从本实用新型的磁悬浮装置处于待机状态说起。这时,悬浮体2初始定位于托板41上,定位凸起41a突伸入凹口2b。悬浮体2在壳体1内处于最低位,至少部分被壳体1的上部所包围,从而使得整个磁悬浮装置在待机状态下表现为一体结构或具有完整协调造型。
35.接下来,启动步进电机14,驱动图示旋转筒20顺时针旋转以执行上升动作。
36.升降筒40的滚头43(或其滚轮44)先在旋转筒20的周向导槽22的下部倾斜段中滚动,同时被迫沿壳体1的内壁上的竖向导槽1s上升,从而使升降筒40相对旋转筒20逐渐提升,直至到达最大高度例如可以观察到托板41升至与壳体1的顶部齐平(悬浮体2这时可以
相对于基础模块35设置成处于临界分离状态);这个过程中,旋转升降支架30的滚头32(或其滚轮33)先在升降筒40的周向导槽42的下部水平段中滚动(顺时针或向左),从而使旋转升降支架30相对升降筒40不产生升降运动或高度保持不变的同时沿导轴23相对旋转筒20上升。
37.升降筒40的滚头43随后进入旋转筒20的周向导槽22的上部水平段中继续滚动,这时就不会再沿壳体1的内壁上的竖向导槽1s上升,从而使升降筒40相对旋转筒20的高度保持不变;这个过程中,旋转升降支架30的滚头32将进入升降筒40的周向导槽42的上部倾斜段中滚动(仍然顺时针或向左),从而使旋转升降支架30相对升降筒40逐渐提升,直至最高位:例如可以观察到悬浮体2脱离托板41后逐渐升高至最大悬浮高度。
38.然后,改变步进电机14的旋转方向,驱动旋转筒20逆时针旋转以执行下降复位动作即可。步进电机14每次顺时针或逆时针的转数均被设定,从而完成上述升降动作过程。例如,周向导槽22的下部倾斜段与周向导槽42的下部水平段所对应的弧度基本相等,而且周向导槽22的上部水平段与周向导槽42的上部倾斜段所对应的弧度也基本相等。这样,电机14顺时针完成设定转数后,旋转升降支架30就会先随升降筒40相对旋转筒20上升一段距离(二者相对高度不变,直至托板41与壳体1的顶部齐平),接下来旋转升降支架30就会相对升降筒40继续旋转上升,直至达到最高位。
39.本实用新型由于取消了轴向或竖向的螺旋举升机构,从而能够最小化装置高度或厚度。另外,由于旋转升降支架30及其上的基础模块35的一体旋转式上升,从而使得悬浮体2在脱离壳体1的瞬间(这时悬浮体2与基础模块35之间的距离刚好是悬浮体相对基础模块稳定悬浮时的设定悬浮高度)就能够自动处于旋转状态(无需再手动拨弄悬浮体2就可使其处于方便观赏等场合下的旋转状态)。例如,如果旋转升降支架30及基础模块35顺时针旋转上升,则会带动悬浮体1自动悬浮于顺时针旋转状态。此外,由于升降筒40在周围的引导作用,旋转升降支架30的旋转升降也会更加平稳。
40.此外,本实用新型的升降机构引入了两种分别设置有导槽的引导筒,即旋转筒20和升降筒40,并通过驱动旋转筒20旋转,巧妙实现了旋转升降支架30的复合旋转上升或下降运动。上升过程为:随着旋转筒20顺时针旋转,旋转升降支架30先随升降筒40一起相对旋转筒20上升,随后又继续相对升降筒40上升;整个上升过程首先可以观察到位于托板41上的悬浮体2从壳体1中上升,直至托板41与壳体1顶部齐平,然后悬浮体2再从托板41起飞直至悬浮至最大设定高度。下降过程为:随着旋转筒20逆时针旋转,旋转升降支架30先相对升降筒40下降,直至托板41与壳体1顶部齐平且悬浮体2降落在托板41上;随后又与升降筒40一起相对旋转筒20下降(托板41同时下沉),直至悬浮体2至少部分被壳体1所包围。整个升降过程中,旋转筒20只旋转不升降,升降筒40则只升降不旋转,旋转升降支架30则既旋转又升降。
41.本领域技术人员应当理解,上述各种方向术语包括“上”、“下”“左”、“右”等仅用于结合附图所示实施例来说明而非限制本实用新型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1