马达的制作方法
1.本实用新型涉及一种马达。
背景技术:
2.马达是将电能转换为机械能的设备,已广泛应用于日常生活的产品之中,例如空调、风扇、洗衣机、水泵、磁碟机、电动刮胡刀、
…
等。虽然马达的种类繁多,但其主要应用的原理仍为电磁效应。一般来说,马达内具有转子磁铁及定子线圈等结构,根据其配置关系而略分为外转子马达及内转子马达两类。以内转子马达为例,当电流进入定子线圈时所产生磁场,与转子永久磁铁的磁场产生相互作用时,可使转轴产生旋转而作功。
3.在现行内转子马达的组装过程中,都是通过工具并利用胶合使永久磁铁固定在转子本体上,但是,胶水固化需要时间,而且工具将永久磁铁定位在转子本体后随即移除,因此在胶水固化之前,永久磁铁可能因工具的移除发生碰触而产生位移,或因环境震动而产生位移,或是其他因素使永久磁铁产生移位,导致永久磁铁间的间距并不一致,使永久磁铁与定子线圈间的磁场作用不均匀,进而使转子转动时的偏摆量过大,轴承也会因振动而承受较高的冲击力,长时间运转时,容易造成马达的损坏。另外,转轴与转子在未有绝缘隔离的情况下,马达内部机构将形成电流回路,因此,在马达运转情况下易于转轴产生电流,进而使轴承受到损坏而造成马达运作不佳,最终导致故障。
技术实现要素:
4.本实用新型的目的为提供一种马达及其转子结构的组装方法,可具有特性较佳(例如抖动较少)的特点。
5.本实用新型的另一目的为提供一种马达及其转子结构的组装方法,其内部的结构不会形成电流回路,可以确保轴承的正常运作,提高马达的寿命。
6.本实用新型的又一目的为提供一种马达及其转子结构的组装方法,除了具有容易组装的优点外,还可提高马达运作的稳定性与可靠度。
7.为达上述目的,本实用新型提供一种马达,其包括:
8.一定子;
9.一转子,与该定子对应设置,该转子包括:
10.一本体,包含:
11.一外环面,具有多个限位区;
12.一第一端面和一第二端面,位于该本体的相对两侧;及
13.一通道,贯穿该第一端面和该第二端面使该本体呈环形柱状;以及
14.多个磁性体,设置于该些限位区;
15.一第一固定件和一第二固定件,该第一固定件的一侧面与该第一端面连接,该第二固定件的一侧面与该第二端面连接;以及
16.一转轴,穿过该第一固定件、该第二固定件及该通道,该转轴通过该第一固定件和
该第二固定件与该本体连接;
17.其中,在该本体与该转轴之间形成一环形中空部。
18.上述的马达,其中该第一固定件与该第二固定件分别具有彼此呈镜像设置的多个定位部,该第一固定件的每两个相邻的该些定位部以及镜像设置于该第二固定件的每两个相邻的该些定位部共同于该外环面上定义出该些限位区。
19.上述的马达,其中在垂直该转轴的长轴方向上,该本体的该通道的内径大于该转轴的直径。
20.上述的马达,其中该第一固定件和该第二固定件分别具有一通孔,该第一固定件和该第二固定件通过该通孔与该转轴紧密配合。
21.上述的马达,其中其特征在于,在平行该转轴的长轴方向上,该第一端面和该第二端面间具有一第一距离,该第一固定件的该侧面和该第二固定件的该侧面间具有一第二距离,该第一距离与该第二距离相等。
22.上述的马达,其中在平行该转轴的长轴方向上,该环形中空部的宽度与该第一固定件的该侧面和该第二固定件的该侧面间的距离相等。
23.上述的马达,其中该第一固定件和该第二固定件的至少一者的该侧面具有一第一卡合结构,该本体的对应该端面具有对应于该第一卡合结构的一第二卡合结构。
24.上述的马达,其中该第一固定件和该第二固定件的至少一者通过一锁固件锁合于该本体的对应该端面。
25.上述的马达,其中该第一固定件和该第二固定件更分别包括二连接部,各该连接部对应连接于该第一固定件和该第二固定件的外围,且该些定位部与该些连接部连接,其中该第一固定件、该第二固定件、该些连接部与该些定位部为一体成型的单一构件。
26.上述的马达,其中该第一固定件和该第二固定件的各该定位部包覆两个相邻该些磁性件远离该本体的部分表面。
27.承上所述,在本实用新型的马达及其转子结构的组装方法中,通过绝缘组件与本体的该些端面连接,且各磁性件位于两个相邻该些定位部之间,以通过该些定位部使该些磁性件定位于本体的外环面的结构设计,使该些磁性件可等距地配置于本体的外环面。借此,由于磁性件可以被限位不产生位移地配置于本体的外环面,因此可使马达具有特性较佳(例如较不易抖动)的特点。
28.另外,本实用新型的绝缘组件中的定位部如同现有技术中磁性件的定位工具,因此可以省略组装过程中的定位工具而节省成本。再者,绝缘组件并不会被移除,因此可将磁性件永久限位在转子本体上,使磁性件不受任何因素而产生位移,进而使所有的磁性件间的间距都相同,借此,可确保磁性件与定子绕组间的磁场作用均匀,进而可提高马达运作的稳定性与可靠度。
29.除此之外,本实用新型的绝缘组件不仅可将转轴确实定位于转子的中心位置,使马达转子结构具有容易组装的优点外,因转子与转轴间具有一环形中空部,故更可在支撑转轴的同时将转轴与转子的本体确实隔离,因此,马达内部机构不会形成电流回路,故也不会形成转轴上的交流电压与电流,从而可确保轴承的正常运作,进而可提高马达的寿命。
30.以下结合附图和具体实施例对本实用新型进行详细描述,但不作为对本实用新型的限定。
附图说明
31.图1a为本实用新型一实施例的一种马达的示意图;
32.图1b为图1a的马达转子结构的组合示意图;
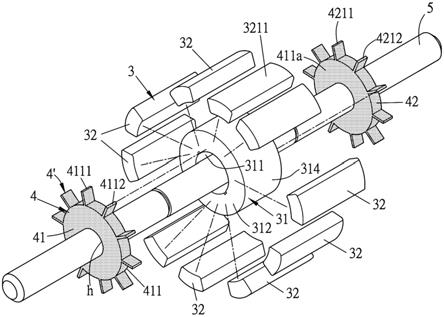
33.图1c为图1b的马达转子结构的分解示意图;
34.图1d为图1b的马达转子结构的部分分解示意图;
35.图1e为图1b的马达转子结构沿割面线a
‑
a的剖视示意图;
36.图2和图3分别为本实用新型不同实施例的马达转子结构的示意图;
37.图4a为本实用新型不同实施例的马达转子结构的组合示意图;
38.图4b为图4a的马达转子结构沿割面线b
‑
b的剖视示意图;
39.图4c为图4a的马达转子结构的立体剖视示意图;
40.图5为本实用新型的马达转子结构的组装方法的流程示意图。
41.其中,附图标记
42.1:马达
43.2:定子
44.21:绕组
45.3:转子
46.31:本体
47.311:通道
48.312:端面
49.313:螺孔
50.314:外环面
51.3141:限位区
52.32:磁性件
53.3211:第一磁性件
54.4,4a:绝缘组件
[0055]4’
:定位部
[0056]
41:第一固定件
[0057]
411,411a:侧面
[0058]
4111:第一定位部
[0059]
4112:第二定位部
[0060]
42:第二固定件
[0061]
421:第一连接部
[0062]
4211:第三定位部
[0063]
4212:第四定位部
[0064]
422:第二连接部
[0065]
5:转轴
[0066]
6:壳体
[0067]
7:轴承
[0068]
8:外盖
[0069]
a:环形中空部
[0070]
a
‑
a,b
‑
b:割面线
[0071]
d1:第一距离
[0072]
d2:第二距离
[0073]
d1,d2:方向
[0074]
h:通孔
[0075]
l:水平延伸线
[0076]
o:凹部
[0077]
p:凸部
[0078]
s:锁固件
[0079]
s01,s02,s03,s04:步骤
具体实施方式
[0080]
以下将参照相关附图,说明依本实用新型较佳实施例的马达及其转子结构的组装方法,其中相同的元件将以相同的参照符号加以说明。
[0081]
图1a为本实用新型一实施例的一种马达的示意图,图1b为图1a的马达转子结构的组合示意图,图1c为图1b的马达转子结构的分解示意图,图1d为图1b的马达转子结构的部分分解示意图,而图1e为图1b的马达转子结构沿割面线a
‑
a的剖视示意图。
[0082]
如图1a至图1e所示,本实用新型的马达1为内转子马达,其可包括一定子2、一转子3、一绝缘组件4以及一转轴5。另外,本实施例的马达1更可包括一壳体6、两轴承7及两外盖8。在此,如图1b所示,定义转子3、绝缘组件4和转轴5的组合为一马达转子结构。
[0083]
定子2可包括多个绕组21围绕成环状组装而成,且定子2的该些绕组21设置于壳体6的内侧(图1a)。
[0084]
转子3设置于环状的定子2的中央,并与定子2对应设置,转子3与定子2之间具有间隙。转子3包括一本体31及多个磁性件32。当定子2的绕组21因电流流过所产生的磁场与转子3的该些磁性件32的磁场产生相互作用时,马达转子结构可相对于定子2旋转而作功。本实施例的本体31为转子铁芯,其可具有一外环面314、一通道311及二端面312(图1c)。通道311位于本体31中间并贯穿二端面312,使本体31呈环形柱状,而该些端面312位于本体31的相对两侧,并与本体31的外环面314连接(图1e)。另外,该些磁性件32可为永久磁铁,其围设于本体31的外环面314。
[0085]
绝缘组件4与本体31的该些端面312连接。其中,绝缘组件4具有多个定位部4’,各磁性件32位于两个相邻该些定位部4’之间,且该些定位部4’使该些磁性件32可定位于本体31的外环面314。举例而言,如图1b和图1c所示,该些定位部4’包括第一定位部4111与第二定位部4112,第三定位部4211及第四定位部4212,其中,第一定位部4111和第二定位部4112相邻,第三定位部4211和第四定位部4212相邻;该些磁性件32包括第一磁性件3211,第一磁性件3211位于第一定位部4111与第二定位部4112之间,以及第三定位部4211与第四定位部4212之间,使第一磁性件3211可定位于本体31的外环面314,其他定位部以此类推。换言之,借由两相邻定位部4’的定位作用,使该些磁性件32不仅可准确地定位在本体31上,更可达到限位而不产生位移。
[0086]
如图1c和图1d所示,本实施例的绝缘组件4包括第一固定件41与第二固定件42,第一固定件41与第二固定件42的结构相同,并对应设置于本体31的相对两侧。其中,第一固定件41与第二固定件42分别具有面向本体31的两端面312的一侧面411、411a,且当第一固定件41与第二固定件42与本体31连接时,第一固定件41与第二固定件42的侧面411、411a与本体31的两端面312对应连接。在一些实施例中,可通过例如黏合或其他连接方式,使第一固定件41与第二固定件42的侧面411、411a与本体31的两端面312连接,以将第一固定件41与第二固定件42安装在本体31的相对两侧,进而通过定位部4’定位该些磁性件32。如图1e所示,在平行转轴5的长轴方向d1(简称方向d1)上,本体31的该些端面312间具有一第一距离d1,第一固定件41与第二固定件42的侧面411、411a间具有一第二距离d2,第一距离d1与第二距离d2系实质相等。换句话说,第一固定件41与第二固定件42系分别紧密贴合在本体31的端面312。
[0087]
另外,本实施例的第一固定件41与第二固定件42的侧缘具有等距配置的多个定位部4’,两相邻定位部4’的间距与磁性件32的宽度相同,且第一固定件41与第二固定件42上相对应的定位部4’位于同一水平延伸线上,意即第一固定件41与第二固定件42上的定位部4’相对于本体31呈镜像一对一设置。举例而言,第一固定件41的第一定位部4111与第二固定件42的第三定位部4211在一水平延伸线上(未绘示),第一固定件41的第二定位部4112与第二固定件42的第四定位部4212在另一水平延伸线l上(图1d),意即第一定位部4111与第三定位部4211呈镜像设置,且第二定位部4112与第四定位部4212呈镜像设置,其他定位部以此类推。第一固定件41的每两个相邻的定位部以及镜像设置于第二固定件42的每两个相邻的定位部可将本体31的外环面314共同定义出多个限位区,使该些磁性件32设置于限位区中而不产生位移。举例而言,如图1c和图1d所示,第一定位部4111、第二定位部4112、第三定位部4211及第四定位部4212可共同于外环面314上定义出一个限位区3141,意即第一固定件41的每两个相邻定位部4’及镜像设置于第二固定件42上的每两个相邻定位部4’,共同于外环面314上定义出限位区3141,且第一定位部4111与第二定位部4112间的间距与第一磁性件3211的宽度相同,第三定位部4211与第四定位部4212间的间距与第一磁性件3211的宽度相同,如此,可使第一磁性件3211设置于外环面314上的限位区3141上而不产生位移,其他定位部仍以此类推。
[0088]
换句话说,借由等距配置的多个定位部4’,使该些磁性件32彼此可等距地配置在本体31的外环面314上,即所有磁性件32彼此的间距都相同(该间距即为定位部4’沿垂直转轴5的长轴方向的厚度),借此,可确保转子3的该些磁性件32与定子2的该些绕组21间的磁场作用均匀,进而可提高马达1运作的稳定性与可靠度。本实施例的第一固定件41与第二固定件42为一绝缘元件,其可由例如但不限于包括塑胶、橡胶或树脂一体成形,或为金属外部包覆塑胶、橡胶或树脂等绝缘材料。
[0089]
转轴5穿过绝缘组件4及本体31的通道311,且转轴5是通过绝缘组件4与本体31连接。如图1c所示,本实施例的转轴5系依序穿过第一固定件41、本体31的通道311及第二固定件42,使得转子3夹置于第一固定件41与第二固定件42之间。其中,第一固定件41与第二固定件42分别具有一通孔h,转轴5穿过通孔h,且第一固定件41与第二固定件42可通过通孔h而与转轴5紧密配合。于此,紧密配合系表示,转轴5的直径与第一固定件41及第二固定件42的通孔h的内径实质相等,两者紧配连接、无法相对转动。
[0090]
另外,请再参照图1e所示,在垂直转轴5的长轴方向d1(即方向d2)上,本体31的通道311的内径大于转轴5的直径。换句话说,转轴5穿过本体31的通道311,但并不接触通道壁,两者之间形成一环形中空部a。因此,转轴5与本体31并不会直接连接,而是通过绝缘组件4(包含第一固定件41与第二固定件42)间接连接。因此,当转子3相对定子2转动时,转子3是通过绝缘组件4带动转轴5一起转动。另外,在平行转轴5的长轴方向d1上,环形中空部a的宽度与第一固定件41及第二固定件42的两个侧面411、411a之间的距离实质相等(环形中空部a的宽度也与本体31的两端面312之间的距离实质相等),这表示,第一固定件41与第二固定件42并不会进入本体31的通道311内。
[0091]
此外,请再参照图1a所示,本实例的两外盖8对应盖合于壳体6的相对两侧,并分别与轴承7紧密配合.而各轴承7对应设置于各外盖8,并位于转子3的相对两侧,且与转轴5紧密配合。
[0092]
承上,在本实施例的马达1中,通过绝缘组件4(包含第一固定件41与第二固定件42)与本体31的该些端面312连接,且各磁性件32位于两个相邻该些定位部4’之间,以通过该些定位部4’使该些磁性件32可定位设置于本体31的外环面314的结构设计,使该些磁性件32可等距地配置于本体31的外环面314。借此,由于磁性件32可以准确且等距配置于本体31的外环面314,使马达1具有特性较佳的特点。举例来说,定子2的绕组21所产生的磁场、与转子3的磁性件32间的磁场相互作用可以较均匀,因此马达1在高速旋转时,其转子结构的偏摆量不致于过大、较不易抖动,从而可提高马达1的寿命。
[0093]
另外,在现有的马达中,由于定子绕组和转子磁性件的位置及/或间隙,以及定子与转子之间的间隙不均匀等原因,使转轴不可避免地要在一个不完全对称的磁场中旋转,致使在转轴两端可能产生一个交流电压,进而产生交流电流,该交流电流局部放电所产生的高温可能会融化轴承的内圈、外圈或滚珠上许多微小区域而形成凹槽,从而使马达转动时产生异音、振动,进而导致轴承失效而使马达故障损坏。
[0094]
因而,在本实施例的马达1中,借由绝缘组件4(包含第一固定件41与第二固定件42)与本体31的该些端面312连接、转轴5通过绝缘组件4与本体31连接、以及转轴5与本体31之间形成环形中空部a的结构设计,不仅可将转轴5确实定位于转子3的中心位置,更在支撑转轴5的同时将转轴5与转子3的本体31确实隔离(两者之间有环形中空部a),因此,马达1内部机构不会形成电流回路,故也不会形成转轴5两端的交流电压与电流,从而可确保轴承7的正常运作,进而可提高马达1的寿命。
[0095]
图2和图3分别为本实用新型不同实施例的马达转子结构的示意图,图4a为本实用新型不同实施例的马达转子结构的组合示意图,图4b为图4a的马达转子结构沿割面线b
‑
b的剖视示意图,而图4c为图4a的马达转子结构的立体剖视示意图。
[0096]
如图2所示,本实施例的马达转子结构与前述实施例(如图1c)的马达转子结构其元件组成及各元件的连接关系大致相同。不同之处在于,在本实施例的马达转子结构中,第一固定件41与第二固定件42的侧面411、411a分别具有至少一第一卡合结构,而本体31的端面312具有对应于第一卡合结构的一第二卡合结构。在本实施例中,第一卡合结构可为一凸部p,第二卡合结构可为一凹部o。因此,当第一固定件41或第二固定件42与本体31组装时,第一固定件41或第二固定件42可分别通过凸部p插入凹部o而与本体31的两端面312连接。本实施例是以第一固定件41及第二固定件42分别具有两个凸部p对应插入两个凹部o为例,
然第一卡合结构与第二卡合结构的数量只是举例,在不同的实施例中,第一卡合结构与第二卡合结构的数量可以不同。此外,第一卡合结构与第二卡合结构的设置位置也可以对调,亦即第一固定件41、第二固定件42的侧面411、411a可具有凹部o,本体31的两端面312可具有对应于凹部o的凸部p,本实用新型不限制。
[0097]
另外,如图3所示,本实施例的马达转子结构与前述实施例的马达转子结构其元件组成及各元件的连接关系大致相同。不同之处在于,在本实施例的马达转子结构中,更可包括至少一锁固件s,锁固件s穿设第一固定件41及第二固定件42,而本体31的端面312具有对应锁固件s的螺孔313,使得第一固定件41及第二固定件42可通过对应的锁固件s锁合于本体31的端面312。本实施例是以4个锁固件s为例,其中两个锁固件s对应穿设第一固定件41而与本体31的端面312连接,另两个锁固件s对应穿设第二固定件42而与本体31的另一端面312连接。在一些实施例中,锁固件s例如但不限于为螺丝或螺栓。
[0098]
此外,如图4a、图4b及图4c所示,本实施例的马达转子结构与前述实施例的马达转子结构其元件组成及各元件的连接关系大致相同。不同之处在于,在本实施例的马达转子结构中,除了第一固定件41与第二固定件42之外,本实施例的绝缘组件4a更可包括第一连接部421与第二连接部422,第一连接部421及第二连接部422分别与第一固定件41及第二固定件42对应设置。其中,第一连接部421与第二连接部422分别为环状,并对应连接于第一固定件41与第二固定件42的外围,且该些定位部4’与第一连接部421及第二连接部422连接。于此,第一连接部421与第二连接部422对应连接第一固定件41与第二固定件42,而第一连接部421与第二连接部422也包覆该些磁性件32的两相对侧面,且定位部4’对应连接于第一连接部421与第二连接部422,并包覆该些磁性件32远离本体31的全部或部分表面。
[0099]
本实施例的第一固定件41、第二固定件42、第一连接部421、第二连接部422、第一固定件41外缘的定位部4’与第二固定件42外缘的定位部4’(即绝缘组件4a)为一体成型的单一构件,然并不以此为限,在一些实施例中,第一固定件41与第二固定件42、第一连接部421、第二连接部422、第一固定件41外缘的定位部4’与第二固定件42外缘的定位部4’的至少其中之一可以是独立构件,并可利用例如黏合、锁合、或嵌合等方式彼此连接在一起。在一些实施例中,第一固定件41外缘的定位部4’与第二固定件42外缘的定位部4’也可以不相互连接,本实用新型皆不限制。在一些实施例中,绝缘组件4a可例如但不限于为塑胶射出件。
[0100]
另外,请参照图1a至图1e并配合图5所示,以说明本实用新型一实施例的马达转子结构的组装方法。其中,图5为本实用新型的马达转子结构的组装方法的流程示意图。
[0101]
本实施例的马达转子结构的组装方法至少可包括以下步骤s01至步骤s04。
[0102]
步骤s01为:提供本体31,其中本体31具有通道311及二端面312,通道311贯通该二端面312使本体31呈环形柱状,且该些端面312位于本体31的相对两侧。
[0103]
步骤s02为:提供绝缘组件4,使绝缘组件4与本体31的该些端面312连接,其中绝缘组件4具有多个定位部4’。在本实施例中,定位部4’至少包括第一定位部4111、第二定位部4112、第三定位部4211及第四定位部4212,而绝缘组件4包括第一固定件41与第二固定件42,第一固定件41与第二固定件42分别具有面向本体31的两端面312的侧面411、411a。另外,组装方法更可包括:使第一固定件41与第二固定件42对应位于本体31的相对两侧,并通过第一固定件41与第二固定件42的侧面411、411a分别与本体31的两端面312连接。其中,第
一固定件41上的第一定位部4111与第二固定件42上的第三定位部4211位于一水平延伸线上;相同地,第一固定件41上的第二定位部4112与第二固定件42上的第四定位部4212也位于另一水平延伸线l上,其他定位部则以此类推。另外,在平行转轴5的长轴方向d1上,本体31的该些端面312间具有第一距离d1,第一固定件41与第二固定件42的该些侧面411、411a间具有第二距离d2,第一距离d1与第二距离d2实质相等。此外,本体31与转轴5之间可形成环形中空部a,且在平行转轴5的长轴方向d1上,环形中空部a的宽度与第一固定件41与第二固定件42的侧面411、411a间的距离实质相等。
[0104]
步骤s03为:提供多个磁性件32,使各磁性件32位于两个相邻该些定位部4’之间,进而通过该些定位部4’使该些磁性件32定位于本体31的外环面314。在本实施例中,磁性件32包括第一磁性件3211,第一磁性件3211设置于由第一定位部4111、第二定位部4112、第三定位部4211及第四定位部4212所定义出的限位区3141,使第一磁性件3211可限位设置于本体31的外环面314而不产生位移,其他定位部仍以此类推。借此,磁性件32可以准确地配置于本体31的外环面314,使马达1具有特性较佳的特点,进而可提高马达1运作的稳定性与可靠度。
[0105]
步骤s04为:使转轴5穿过绝缘组件4及本体31的通道311,其中转轴5通过绝缘组件4与本体31连接。在本实施例中,绝缘组件4(包含第一固定件41与第二固定件42)系通过其通孔h与转轴5紧密配合。另外,在垂直转轴5的长轴方向d1上(即方向d2),本体31的通道311的内径大于转轴5的直径。
[0106]
因此,在本实施例中,借由绝缘组件4(包含第一固定件41与第二固定件42)、转子3和转轴5的结构设计及组装过程,不仅可将转轴5确实定位于转子3的中心位置,也使转子结构的组装过程相当容易。
[0107]
另外,如前述的图2所示,在一些实施例中,组装方法更可包括:使第一固定件41与第二固定件42的凸部p插入本体31对应的凹部o。于此,第一固定件41与第二固定件42的侧面411、411a具有凸部p,本体31的两端面312具有对应于凸部p的凹部o,且系借由凸部p插入对应的凹部o而使第一固定件41与第二固定件42与本体31连接。
[0108]
如前述的图3所示,在一些实施例中,组装方法更可包括:通过锁固件s使第一固定件41与第二固定件42锁合于本体31的端面312。于此,第一固定件41与第二固定件42系通过多个锁固件s分别锁合于本体31的两端面312。
[0109]
如前述的图4a至图4c所示,在一些实施例中,除了第一固定件41与第二固定件42之外,绝缘组件4a更可包括第一连接部421与第二连接部422,第一连接部421与第二连接部422对应连接于第一固定件41与第二固定件42的外围,且该些定位部4’与第一连接部421及第二连接部422连接。在一些实施例中,组装方法更可包括:使绝缘组件4a的各定位部4’包覆两个相邻该些磁性件32远离本体31的部分表面。在一些实施例中,第一固定件41、第二固定件42、第一连接部421、第二连接部422、第一固定件41外缘的定位部4’与第二固定件42外缘的定位部4’(即绝缘组件4a)可为一体成型的单一构件。
[0110]
此外,马达转子结构的组装方法的其他技术特征已于上述中详述,在此不再多作说明。
[0111]
综上所述,在本实用新型的马达及其转子结构的组装方法中,通过绝缘组件与本体的该些端面连接,且各磁性件位于两个相邻该些定位部之间,以通过该些定位部使该些
磁性件定位于本体的外环面的结构设计,使该些磁性件可等距地配置于本体的外环面。借此,由于磁性件可以被限位不产生位移地配置于本体的外环面,因此可使马达具有特性较佳(例如较不易抖动)的特点。
[0112]
另外,本实用新型的绝缘组件中的定位部如同现有技术中磁性件的定位工具,因此无需定位工具而节省成本。再者,绝缘组件并不会被移除,因此定位部可将磁性件永久限位在转子本体上,使磁性件不受任何因素而产生位移,而任两相邻磁性件以定位部相隔,进而使所有的磁性件间的间距(即定位部的厚度)都相同,借此,可确保磁性件与定子绕组间的磁场作用均匀,进而可提高马达运作的稳定性与可靠度。
[0113]
除此之外,本实用新型的绝缘组件不仅可将转轴确实定位于转子的中心位置,使马达转子结构具有容易组装的优点外,因转子与转轴间具有一环形中空部,故更可在支撑转轴的同时将转轴与转子的本体确实隔离,因此,马达内部机构不会形成电流回路,故也不会形成转轴上的交流电压与电流,从而可确保轴承的正常运作,进而可提高马达的寿命。
[0114]
当然,本实用新型还可有其它多种实施例,在不背离本实用新型精神及其实质的情况下,熟悉本领域的技术人员当可根据本实用新型作出各种相应的改变和变形,但这些相应的改变和变形都应属于本实用新型所附的权利要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1