一种交流伺服控制系统的保护电路的制作方法
1.本实用新型涉及电路技术领域,特别是一种交流伺服控制系统的保护电路。
背景技术:
2.伺服指系统跟随外部指令进行人们所期望的运动。伺服系统作为一种传动装置,在现代工业的各个领域有广泛的运用。伺服系统主要由伺服驱动器、伺服电机和反馈装置、接线电缆等相关配件组成。伺服驱动器的功能是接受外部指令,完成伺服系统的闭环控制。伺服驱动器采用经典自动控制控制理论对电机进行速度环和电流环控制。以控制器为核心,以电力电子功率变换装置为执行机构,将电能转换为机械能,实现机械的运动要求。
3.现代自动化控制技术的迅猛发展,应用领域不断拓宽,针对用户的各种使用恶劣工况,驱动系统具备的安全性设计的要求也越来越全面。通常情况下,伺服驱动系统具备过压、欠压、过载、过热、反馈报警等安全保护,可以满足用户的常规要求,但是针对用户一些特殊的工况,即考虑针对性的设计。如用户的俯仰负载在外部动力电源误操作的情况下,伺服驱动系统负载会快速出现跌落,常规的保护难以实现对系统负载的保护。
技术实现要素:
4.本实用新型的目的在于提供一种安全、可靠的交流伺服控制系统的保护电路,从而避免系统动力电源误操作引起负载损坏。
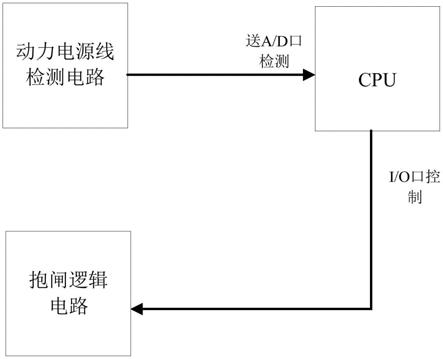
5.实现本实用新型目的的技术解决方案为:一种交流伺服控制系统的保护电路,包括动力电源线检测电路、抱闸逻辑电路;所述动力电源线检测电路,用于检测输入电源进线的通断,并接入cpu的a/d端口,cpu的i/o端口连接抱闸逻辑电路,抱闸逻辑电路通过制动器抱死系统负载。
6.进一步地,所述动力电源线检测电路包括外部输入动力电源正端dc540+、负端m600,线性光耦芯片u301的前级供电电源正端p5v、负端m600,线性光耦芯片u301的后级供电电源正端2p5v、负端2m5;其中电源正端dc540+依次串联电阻r32、电阻r33、电阻r34、电阻r35、电阻r36、电阻r37、电阻r38、电阻r39、电阻r40、电阻r51,电阻r51两端并联电阻r52,电阻r52的两端并联电容c32,电容c38、电阻r53串联后并联于电容c32两端;电源正端p5v、负端m600之间串联设置电容c31,电源正端p5v连接线性光耦芯片u301的1号端口、负端m600连接线性光耦芯片u301的3、4号端口,电容c38、电阻r53的公共端接入线性光耦芯片u301的2号端口;电源正端2p5v、负端2m5分别连接线性光耦芯片u301的8号、5号端口,且电源正端2p5v、负端2m5之间串联电容c39;线性光耦芯片u301的7号端口通过电阻r56连接电容c30的一端、6号端口通过电阻r57连接电容c30的另一端,电容c30的两端为输出电压信号udc
‑
540+和udc
‑
540。
7.进一步地,所述抱闸逻辑电路包括电阻r1、电阻r2、电阻r3、电阻r4、电阻r5、电阻r6、电阻r7、电阻r8、电阻r9、电阻r10,电容c1、电容c2、电容c3、电容c4、电容c63,光耦b1,mos管v1,稳压二极管v2,二极管v3,+5v电源正端1p5和负端1m5,+24v电源正端p24和负端
m24b,+15v电源正端p15和负端m24b;电阻r1作为光耦b1的源边电阻一端接1p5,另一端接光耦的1脚;电阻r3作为光耦副边的电阻,一端接光耦的4脚,另一端接mos管v1的栅极;电阻r2作为限流电阻,一端接外部p24以及mos管v1的源极,另一端接mos管v1的栅极;电阻r7作为取样电阻一端接m24即+24v的地信号,另一端为信号br+,mos管v1的漏极为信号br
‑
;电容c4作为滤波电容接在信号br
‑
和br+之间,二极管v3作为续流二极管接在br
‑
和br+之间,二极管v3之间并联对外插座xs1;电阻r6和电阻r8作为线性光耦芯片u1的输入电阻,一端分别接线性光耦芯片u1的2脚和3脚,电阻r6的另一端接br+,电阻r8的另一端接接m24即+24v的地信号;c1作为信号滤波电容接线性光耦芯片u1的2脚和3脚;p15a即+15v通过电阻r4、电阻r5、稳压二极管v2及电容c2构成线性光耦芯片u1的供电电源连接到u1的1脚和4脚;电阻r9、电阻r10和电容c63构成滤波电路接到线性光耦芯片u1的7脚和6脚;1p5和1m5通过电容c3接到线性光耦芯片u1的8脚和5脚。
8.进一步地,所述线性光耦芯片u301、线性光耦芯片u1的型号均为acpl79b。
9.本实用新型与现有技术相比,其显著优点为:(1)包括数字式交流伺服驱动器、伺服电机及配套制动器,驱动器内部设计有检测电路,可快速的检测外部的信号,快速的保护系统负载;(2)可极大的降低系统负载损坏率,具有安全、可靠的特点。
附图说明
10.图1是外部动力电源线检测图。
11.图2是抱闸逻辑电路图。
12.图3是外部动力电源检测和抱闸逻辑电路关系图
13.图4是外部动力电源检测、抱闸逻辑电路与交流伺服控制系统之间的电路连接图。
具体实施方式
14.本实用新型一种交流伺服控制系统的保护电路,包括动力电源线检测电路、抱闸逻辑电路;所述动力电源线检测电路,用于检测输入电源进线的通断,并接入cpu的a/d端口,cpu的i/o端口连接抱闸逻辑电路,抱闸逻辑电路通过制动器抱死系统负载。
15.进一步地,所述动力电源线检测电路包括外部输入动力电源正端dc540+、负端m600,线性光耦芯片u301的前级供电电源正端p5v、负端m600,线性光耦芯片u301的后级供电电源正端2p5v、负端2m5;其中电源正端dc540+依次串联电阻r32、电阻r33、电阻r34、电阻r35、电阻r36、电阻r37、电阻r38、电阻r39、电阻r40、电阻r51,电阻r51两端并联电阻r52,电阻r52的两端并联电容c32,电容c38、电阻r53串联后并联于电容c32两端;电源正端p5v、负端m600之间串联设置电容c31,电源正端p5v连接线性光耦芯片u301的1号端口、负端m600连接线性光耦芯片u301的3、4号端口,电容c38、电阻r53的公共端接入线性光耦芯片u301的2号端口;电源正端2p5v、负端2m5分别连接线性光耦芯片u301的8号、5号端口,且电源正端2p5v、负端2m5之间串联电容c39;线性光耦芯片u301的7号端口通过电阻r56连接电容c30的一端、6号端口通过电阻r57连接电容c30的另一端,电容c30的两端为输出电压信号udc
‑
540+和udc
‑
540。
16.进一步地,所述抱闸逻辑电路包括电阻r1、电阻r2、电阻r3、电阻r4、电阻r5、电阻r6、电阻r7、电阻r8、电阻r9、电阻r10,电容c1、电容c2、电容c3、电容c4、电容c63,光耦b1,
mos管v1,稳压二极管v2,二极管v3,+5v电源正端1p5和负端1m5,+24v电源正端p24和负端m24b,+15v电源正端p15和负端m24b;电阻r1作为光耦b1的源边电阻一端接1p5,另一端接光耦的1脚;电阻r3作为光耦副边的电阻,一端接光耦的4脚,另一端接mos管v1的栅极;电阻r2作为限流电阻,一端接外部p24以及mos管v1的源极,另一端接mos管v1的栅极;电阻r7作为取样电阻一端接m24即+24v的地信号,另一端为信号br+,mos管v1的漏极为信号br
‑
;电容c4作为滤波电容接在信号br
‑
和br+之间,二极管v3作为续流二极管接在br
‑
和br+之间,二极管v3之间并联对外插座xs1;电阻r6和电阻r8作为线性光耦芯片u1的输入电阻,一端分别接线性光耦芯片u1的2脚和3脚,电阻r6的另一端接br+,电阻r8的另一端接接m24即+24v的地信号;c1作为信号滤波电容接线性光耦芯片u1的2脚和3脚;p15a即+15v通过电阻r4、电阻r5、稳压二极管v2及电容c2构成线性光耦芯片u1的供电电源连接到u1的1脚和4脚;电阻r9、电阻r10和电容c63构成滤波电路接到线性光耦芯片u1的7脚和6脚;1p5和1m5通过电容c3接到线性光耦芯片u1的8脚和5脚。
17.进一步地,所述线性光耦芯片u301、线性光耦芯片u1的型号均为acpl79b。
18.下面结合附图和实施例对本实用新型做进一步详细说明。
19.实施例
20.本实用新型有数字式交流伺服驱动器,俯仰伺服电机及电机制动器。
21.本实用新型的工作原理为:本实用新型设计电路主要包括伺服驱动系统内部的dc540输入动力电源线检测电路、抱闸逻辑电路。动力电源线检测电路通过检测输入电源进线的通断来实现,使用光耦电路进行设计,高响应,如图1所示;抱闸逻辑电路主要包括抱闸开关电路和抱闸检测电路组成,功能电阻主要由光耦、开关mos管、阻容器件构成,如图2所示。本系统的安全性设计是通过检测外部动力电源的通断来控制抱闸的状态,结合图1、图2、图3和图4,工作原理如下,外部动力通电后,图1中dc540通过电阻r32、r33、r34、r35、r36、r37、r38、r39、r40、r51、r52进行分压,通过电阻分压将强电信号分压成电压小信号,小信号电压值进行c32、c38、r53进行rc滤波措施后,通过线性光耦u301线性隔离放大处理,隔离处理后经过c30滤波后送cpu检测,cpu检测到该电压值后,输出抱闸指令,控制光耦b1来开通mos管v1,v1开通后,串联在抱闸回路中电阻r7有电压值,该电压值通过线性光耦隔离输出送给cpu,cpu检测到抱闸状态。当外部dc540电源因为误操作出现突然断电的现象,r1~r11进行分压的电压值迅速降到0,cpu检测到电压值降为0后,系统软件认为外部电源线断电,通过io口输出指令控制光耦b1关断v1,立即将抱闸抱死,硬件电路检测到抱闸电流到一定门槛值后,将系统的使能断开,通过制动器抱死系统负载,上述功能的完成在ms级,可快速的实现对用户负载的保护。
22.图3是外部动力电源检测和抱闸控制关系图,cpu检测外部动力电源,检测的后的逻辑信号来控制电机抱闸。图4是外部动力电源检测、抱闸逻辑电路与交流伺服控制系统之间的电路连接关系,交流伺服控制系统主要包括交流伺服驱动器及电机包括电机制动器,伺服驱动器硬件电路主要由二极管、保险丝、储能电容器、制动电路、功率板、控制板、人机接口板等组成。驱动器外部动力电源供电,输入给二极管对储能电容器进行储能,当外部出现断电后,检测二极管前级的外部动力电源检测端信号立即变为0,该信号上传给控制板的cpu,cpu立即输出控制信号,将电机的制动器锁死,最终快速的实现对用户负载的保护。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1