一种双侧驱动高速电机的制作方法
1.本实用新型涉及一种高速电动机,尤其为一种双侧驱动高速永磁开关磁阻电机。
背景技术:
2.高速电机是一种高功率密度电机,体积小、重量轻、功率输出大,在许多应用场合都能发挥极其重要的作用。电机的转速、扭矩是电动机的主要性能指标,电机在高转速情况下,仍然能保持较大的转动扭矩,一直电机研究设计的重要课题。由于电机励磁绕组的电感量是随着转速的提高而快速上升,从而限制了电机转速的提高。所以,高速电机的转速、扭矩、绕组电感和电机结构之间关系的匹配设计,一直是高速电机研究和需要解决的课题。
3.高速大扭矩电机结构简单、激励控制方便是高速电机设计必须要考虑的因素。减少电机励磁凸极对个数,采用极靴状凸极都成为结构高速电动机的技术手段,但转子上永磁体在经过相邻励磁凸极之间的空隙时,因为磁场变化突然、剧烈,会形成波动,而这种微小的波动在高速状态下会被放大,从而影响到该高速电动机的性能进一步提升。
技术实现要素:
4.本实用新型的目的是提供一种双侧驱动高速电机。
5.为实现上述目的,本实用新型的技术方案是一种双侧驱动高速电机,其构成包括有,电动机基座、电动机罩壳、外转子、定子、位置传感器、激励控制电源,其特征在于:其特征在于:所述定子分为左侧定子座和右侧定子座,左侧定子座内固定有一个励磁凸极对,右侧定子座内也固定有一个励磁凸极对,两个励磁凸极对的结构完全相同且对称设置,所述励磁凸极对由励磁铁芯和励磁线圈构成,左侧定子座励磁凸极对的励磁线圈串联为一组,右侧定子座励磁凸极对的励磁线圈串联为一组,所述外转子支架为双侧悬臂结构,在外转子支架左右两侧悬臂径向内表面固定有导磁圆环,在该导磁圆环内表面固定有两个圆弧形永磁体,这两个永磁体的磁极性指向是径向的,且这两个永磁体的磁极性不相同,此外,外转子支架悬臂左侧固定的两个永磁体的径向中心点连线呈垂直方向,而悬臂支架右侧固定的两个永磁体的径向中心点连线呈水平方向。
6.在上述技术方案中,所述励磁凸极对中励磁铁芯为异型圆弧状极靴铁芯,该异型极靴铁芯的两个凸极圆弧状极靴均由极靴宽部和极靴窄部构成,定子座上相邻两个励磁凸极对异型极靴铁芯的极靴窄部相互交错设置,且相邻两个励磁凸极对异型极靴铁芯的极靴窄部之间存在间隙。
7.在上述技术方案中,所述异型圆弧状极靴铁芯的窄部呈阶梯状,或呈斜坡状;所述两个异型圆弧状极靴铁芯的极靴窄部相互交错设置,两个极靴窄部之间间隙的范围为0.5毫米至5.0毫米;所述转子上圆弧状永磁体弧长等于小于异型极靴铁芯的弧长 ,且大于等于异型极靴铁芯宽部的弧长。
8.在上述技术方案中,所述位置传感器为两个霍尔传感器,两个霍尔传感器分别固定于两侧定子座上,位置传感器的径向距离与圆弧状永磁体内弧面的径向距离相同,当某
一侧励磁凸极对异型极靴径向中心线与该侧圆弧状永磁体径向中心线重合,设置在该侧的霍尔传感器则正对该侧两个圆弧状永磁体之间缝隙的中央平分线上,当该侧两个圆弧状永磁体相继经过该霍尔传感器,该霍尔传感器输出电信号至激励控制电源,使激励控制电源改变该侧励磁凸极对励磁线圈中激励电流的方向。
9.在上述技术方案中,所述励磁凸极对与定子座之间采用高导热胶灌封固化,成为一个固态导热体,定子座外侧设置在有散热叶片。
10.本实用新型的优点是,1.采用最少励磁凸极对的个数,形成最大换向角度空间(180
°
);2.降低励磁线圈激励电流换向的控制方法,提高励磁线圈激励电流的换向速度;3.定子上励磁凸极对铁芯采用宽窄部特异形状,并将同一个励磁凸极对的极靴窄部做交错设置,此结构,第一、加大了励磁凸极对各个铁芯凸极极靴两端所对应的圆心角度,这使得处于重合位置永磁体与相邻铁芯极靴之间距离大大的缩小或已处于搭接状态,这不但能使处在重合位置励磁凸极对励磁线圈电流在换向导通时励磁线圈内电感量有所增加,从而降低了换向时的电流冲击和避免了使永磁体退磁的因素,而且也显著提高了励磁线圈激励电流换向时的扭矩输出。第二、极靴窄部做交错设置,形成了一个重叠区域,该重叠区域内的两个极靴窄部的磁极性相异,且因为激励电流换向而同时发生磁极性的改变,而当转子上的永磁体进入该重叠区域内,两个极靴窄部的磁极性虽然相异,但位于永磁体逆时针方向的励磁凸极对极靴凸极是排斥该永磁体的,而位于该永磁体顺时针方向的励磁凸极对极靴凸极则是吸引该永磁体的,进而使该永磁体在重叠区域形成了平滑地经过。能提高转矩,并明显降低电机的转矩波动性。第三、此结构电机还可以通过加大定子上各励磁凸极对铁芯凸极极靴弧长所对应圆心角度来降低转子上永磁体弧长对应角度,从而减少昂贵的永磁体材料使用量,降低成本。
附图说明
11.图1是本实用新型双侧驱动高速电机结构剖面图。
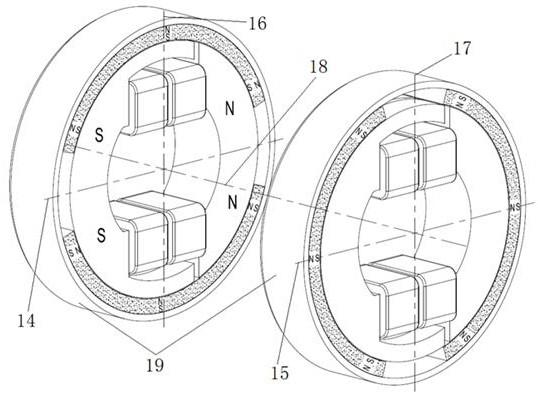
12.图2是本实用新型双侧驱动高速电机中,左侧励磁凸极对及永磁体与右侧励磁凸极对及永磁体相对安装位置示意图。
13.图3是本实用新型励磁凸极对二阶梯状极靴窄部的铁芯结构示意图。
14.图4是本实用新型励磁凸极对三阶梯状极靴窄部的铁芯结构示意图。
15.图5是本实用新型励磁凸极对斜坡状极靴窄部的铁芯结构示意图。
16.图6是本实用新型由左右两个部分结构励磁凸极对二阶梯状极靴窄部交错铁芯结构示意图。
17.图7是本实用新型单侧转子支架及永磁体顺时钟旋转,永磁体径向中心线与极靴铁芯径向中心线未重合时刻示意图。
18.图8是本实用新型单侧转子支架及永磁体顺时钟继续旋转,永磁体径向中心线与极靴铁芯径向中心线处于重合位置时刻示意图。
19.图9是本实用新型单侧转子支架及永磁体顺时钟继续旋转,永磁体径向中心线与极靴铁芯径向中心线离开重合位置时刻示意图。
20.图10是本实用新型左侧部分位置传感器和右侧部分传感器的设置示意图。
21.以上附图中,1是动力输出轴,2是电机端盖,3是散热叶轮,4是左侧定子座,5是励
磁凸极对铁芯的缠绕励磁线圈部段,6是励磁线圈,7是励磁凸极对铁芯的极靴窄部, 8是导磁圆环,9是圆弧状永磁体, 10是非导磁限位块, 11是非导磁转子座,12是非导磁限位块,13是电机右侧位置传感器, 14是电机左侧极靴单元铁芯极靴宽部的径向中心线,15是电机右侧极靴单元铁芯极靴宽部的径向中心线,16是电机左侧两个永磁体的径向中心线,17是电机右侧两个永磁体的径向中心线,18是电机转动轴线,19是导磁圆环,30是极靴凸极宽部,31是极靴凸极窄部,32是两凸极连接部段,33是极靴凸极的宽部,34是极靴凸极的窄部,35是极靴凸极的宽部,36是极靴凸极的窄部,37是极靴凸极的宽部,38是极靴凸极的窄部,39是两凸极连接部段的凸部,sa是电机左侧位置传感器,sb是电机右侧位置传感器,ya是电机左侧圆弧状永磁体,yb是电机右侧圆弧状永磁体。
具体实施方式
22.实施例,本实施例电机结构剖面如附图1所示。
23.在本实施例中,励磁凸极对采用二阶交错双部件组合极靴励磁单元铁芯34,如附图6所示,该组合极靴励磁单元铁芯左部件的极靴宽部37与组合极靴铁芯右部件的极靴宽部37相同,组合极靴铁芯左部件的极靴窄部38与组合极靴铁芯右部件的极靴窄部38交错,组合极靴铁芯左部件绕制励磁线圈部段的端部有突键39,该突键39与组合极靴铁芯右部件的键槽配合组装。
24.在本实施例中,电机左侧励磁凸极对和电机右侧励磁凸极对分别设置于左侧定子座和右侧定子座。参见附图2,两侧励磁凸极对的设置方向相同,即左侧励磁凸极对极靴宽部径向中心线连线34为水平直线,右侧励磁凸极对极靴宽部径向中心线连线15也为水平直线,而电机左侧两个永磁体的径向中心线连线16和电机右侧两个永磁体的径向中心线连线15相互垂直。
25.在本实施例中,电机左侧励磁线圈的接线如附图7所示。励磁线圈a0和励磁线圈a0
′
串联,励磁线圈a1和励磁线圈a1
′
串联。与电机左侧励磁线圈接线方式相同,电机右侧励磁线圈b0和励磁线圈b0
′
串联,励磁线圈b1和励磁线圈b1
′
串联。
26.在本实施例中,电机左侧和电机右侧各设置一个位置传感器,电机左侧和右侧位置传感器13均设置在定子座上方十二点位置处,参见附图1,左侧和右侧位置传感器的径向距离与圆弧状永磁体外弧面的径向距离相同。电机右侧两个永磁体旋转会相继经过右侧位置传感器13,若前一个永磁体尾端t1时刻离开该位置传感器13,后一个永磁体前端t2时刻到达该位置传感器13(参见附图10,位置传感器sa正处于电机右侧两个永磁体ya的空隙之间),该位置传感器13会发出位置信号到激励控制电源,激励控制电源随即改变电机右侧励磁线圈中的电流方向,即,由输入正向激励电流改为输入反向激励电流,从而使电机右侧励磁凸极对的极靴磁极性发生改变。如附图2所示,由于电机左侧两个永磁体的径向中心线16和电机右侧两个永磁体的径向中心线15相差九十度圆心角,因此,当电机旋转90度后,左侧位置传感器sb正处于电机左侧两个永磁体yb的空隙之间,左侧位置传感器sb发出位置信号到激励控制电源,激励控制电源随即改变电机左侧励磁线圈中的电流方向,即,由输入反向激励电流改为输入正向激励电流,从而使电机左侧励磁凸极对的极靴磁极性发生改变。
27.本实施例电机的运转及控制过程如下:
28.如附图7所示,此刻电机左侧两个永磁线径向中心线与左侧励磁凸极对极靴宽部
径向中心线并未重合时,此刻,a0与a0
′
两端输入正向激励电流,励磁凸极对左端呈s极性,对左端永磁体有磁吸引作用,而励磁凸极对右端则呈n极性,对右端永磁体有磁吸引作用,形成沿转子顺时针方向的正向力矩。
29.当电机左侧两个永磁线径向中心线与左侧励磁凸极对极靴宽部径向中心线处于重合位置时,如附图8所示,此刻,a0与a0
′
两端输入激励电流为零,励磁凸极对左端和右端无磁极性,从而不再对永磁体有磁吸引作用。而此刻,电机右侧的励磁线圈b0与b0
′
两端输入有反向激励电流,右侧励磁凸极对的两个极靴对右侧两个永磁体具有磁吸引力,保持对电机转动轴的正向力矩。
30.当电机左侧两个永磁线径向中心线与左侧励磁凸极对极靴宽部径向中心线离开重合位置时,如附图9所示,此刻,a1与a1
′
两端输入反向激励电流,励磁凸极对左端呈n极性,对左端永磁体有磁排斥作用,同时,左端永磁体还受到右端极靴窄部s极的吸引,因为此刻左端永磁体已搭接右端极靴窄部,相对应地,励磁凸极对右端则呈s极性,对右端永磁体有磁排斥作用,右端永磁体还受到左端极靴窄部n极的吸引,因为此刻右端永磁体已搭接左端极靴窄部。左右两端永磁体均受“前吸后推”的磁作用力,形成沿转子顺时针方向的正向力矩。
31.由于电机左侧两个永磁体的径向中心线连线与右侧两个永磁体径向中心线连线的圆心角度之差为九十度,故电机转子每旋转九十度,就会在电机的左侧和右侧交替出现附图8所示的状态,即两个永磁线径向中心线与励磁凸极对极靴宽部径向中心线处于重合位置。电机左侧和右侧励磁线圈交替改变输入激励电流的方向,使得电机转动轴上始终能获得正向力矩。
32.在本实施例中,励磁凸极对铁芯还可以分别采用如附图3、附图4、附图5所示结构。励磁凸极对的铁芯为一个整体,附图3是励磁凸极对铁芯极靴窄部呈二阶梯状交错设置,附图4是励磁凸极对铁芯极靴窄部呈三阶梯状交错设置,附图5是励磁凸极对铁芯极靴窄部呈斜坡状交错设置。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1