一种带磁编码器的无刷直流电机驱动装置
1.本实用新型涉及无刷直流电机控制驱动技术领域,特别涉及一种带磁编码器的无刷直流电机驱动装置。
背景技术:
2.自机器人技术兴起以来,为满足日益旺盛的自动化生产需求,工业领域率先开启了对机器人的大范围应用,并用极短的时间实现了规模化的发展。工业机械臂在抓取或移动的过程中,普遍使用无刷直流电机来进行驱动。
3.为了实现精确控制机械臂的运动,需要对电机的运行参数进行读取,进一步通过控制电机来控制机械臂的运动。如申请号为cn107147373a的发明专利公开的无刷电机磁场定向控制驱动系统及控制方法,通过模拟磁角度测量传感器模块获取无刷电机转子的角度位置信息的正弦和余弦模拟电压信号,主控模块内部装载磁场定向控制算法,允许较高的位置控制精度。模拟磁角度测量传感器模块在数据传输时,实现比较方便,但失真率较高。无刷直流电机使用时,需要进行校准,该专利不能保存上次的校准值,若电机带有负载时的转动角度范围不够,则每次上电使用均需进行拆卸,操作复杂。同时也没有额外的外设接口,不能与其他单片机进行通信,拓展性不强。
技术实现要素:
4.本实用新型的目的是为了解决现有技术中的上述缺陷,提供一种带磁编码器的无刷直流电机驱动装置。
5.本实用新型的目的可以通过采取如下技术方案达到:
6.一种带磁编码器的无刷直流电机驱动装置,包括stm32主控芯片、eeprom存储器、磁编码器、drv8301前置驱动芯片、mosfet三相全桥电路、ch340芯片、外设接口以及电源模块;
7.电源模块为drv8301前置驱动芯片、磁编码器、eeprom存储器、stm32主控芯片和ch340芯片供电;
8.eeprom存储器与stm32主控芯片通信;磁编码器与stm32主控芯片通信,drv8301前置驱动芯片与stm32主控芯片通信;外设接口与stm32主控芯片的相连;stm32主控芯片接收eeprom存储器的电机配置信息以及磁编码器的电机转子信息,根据磁场定向控制算法输出三路互补pwm波;drv8301前置驱动芯片接收stm32主控芯片的三路互补pwm波,生成驱动电压,用于mosfet三相全桥电路;mosfet三相全桥电路通过导线外接无刷直流电机,达到控制无刷直流电机的目的。
9.进一步地,stm32主控芯片采用stm32f405rgt6,工作频率为168兆赫,提供三个12位adc、两个dac、一个低功耗rtc、十二个通用16位定时器,包括两个用于电机控制的pwm定时器、两个通用32位定时器;stm32主控芯片内部装载有磁场定向控制算法,根据eeprom存储器的电机配置信息、磁编码器的电机转子信息以及drv8301前置驱动芯片的三相电流数
据,通过磁场定向控制算法得到需要的控制电压,利用电压空间矢量模型模拟无刷直流电机的输入电压,进而控制无刷直流电机。
10.进一步地,磁编码器采用12位可编程磁位置传感器as5045,是一种无接触式磁旋转编码器,在单个封装内整合了集成式hall元件、模拟前端和数据信号处理功能;as5045芯片通过spi与stm32主控芯片通信。
11.进一步地,电源模块外接24v电源并直接为drv8301前置驱动芯片供电;电源模块通过lm2576芯片将24v电源降压为5v并为as5045磁编码器供电;电源模块通过az1117芯片将24v电源降压为3.3v并为eeprom存储器、stm32主控芯片和ch340芯片供电。
12.进一步地,drv8301前置驱动芯片提供三个半桥驱动器,每个驱动器能够驱动两个n通道mos管,包括两个电流分路放大器,用于精确测量电流;drv8301前置驱动芯片利用采样电阻获取b、c相电流,并通过spi通信将电流数据发送给stm32主控芯片,同时获取stm32主控芯片的三路互补pwm波,生成驱动电压,用于驱动mosfet三相全桥电路。
13.进一步地,mosfet三相全桥电路中,mosfet采用型号为ntmfs4935nt1g的n沟道mosfet。
14.进一步地,eeprom存储器通过iic与stm32主控芯片通信,用于实现掉电保存、配置参数数据的功能。采用micro usb接口母座和ch340芯片实现usb配置接口,ch340芯片连接stm32主控芯片的rxd、txd引脚和micro usb接口母座的d+、d
‑
引脚,通过ch340芯片可以将stm32主控芯片输出的ttl电平转为usb电平,使用usb数据线将micro usb接口母座与电脑usb端口相连,可以使电脑获取电机运行数据以及进行参数调整。外设接口通过导线与stm32主控芯片的四个io口相连,可以与其他单片机进行spi通信。提高了带磁编码器的无刷直流电机驱动装置的拓展性。
15.与现有技术相比,本实用新型的有益效果是:
16.1、本实用新型无刷直流电机驱动装置中的磁编码器采用12位可编程磁位置传感器as5045,是一种无接触式磁旋转编码器,在单个封装内整合了集成式hall元件、模拟前端和数据信号处理功能,体积小,安装灵活,精度高。
17.2、本实用新型无刷直流电机驱动装置具有usb配置接口,预留了外设接口,具有与电脑、单片机通信的功能,拓展性强。
18.3、本实用新型无刷直流电机驱动装置具有eeprom存储器,支持掉电保存、配置参数数据,可以保留校准值,减少每次重启都需进行拆卸负载的操作。
附图说明
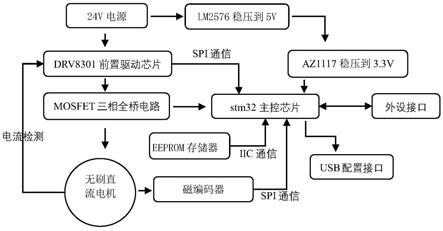
19.图1为本实用新型公开的一种带磁编码器的无刷直流电机驱动装置的结构框图。
具体实施方式
20.下面结合附图和实施例对本实用新型进行详细解释说明。
21.实施例:
22.一种带磁编码器的无刷直流电机驱动装置,如图1所示,包括stm32主控芯片、eeprom存储器、磁编码器、drv8301前置驱动芯片、mosfet三相全桥电路、ch340芯片、外设接口以及电源模块;
23.电源模块为drv8301前置驱动芯片、磁编码器、eeprom存储器、stm32主控芯片和ch340芯片供电;
24.eeprom存储器与stm32主控芯片通信;磁编码器与stm32主控芯片通信,drv8301前置驱动芯片与stm32主控芯片通信;外设接口与stm32主控芯片的相连;stm32主控芯片接收eeprom存储器的电机配置信息以及磁编码器的电机转子信息,根据磁场定向控制算法输出三路互补pwm波;drv8301前置驱动芯片接收stm32主控芯片的三路互补pwm波,生成驱动电压,用于mosfet三相全桥电路;mosfet三相全桥电路通过导线外接无刷直流电机,达到控制无刷直流电机的目的。
25.stm32主控芯片采用stm32f405rgt6,工作频率为168兆赫,提供三个12位adc、两个dac、一个低功耗rtc、十二个通用16位定时器,包括两个用于电机控制的pwm定时器、两个通用32位定时器;stm32主控芯片内部装载有磁场定向控制算法,根据eeprom存储器的电机配置信息、磁编码器的电机转子信息以及drv8301前置驱动芯片的三相电流数据,通过磁场定向控制算法得到需要的控制电压,利用电压空间矢量模型模拟无刷直流电机的输入电压,进而控制无刷直流电机。
26.磁编码器采用12位可编程磁位置传感器as5045,是一种无接触式磁旋转编码器,在单个封装内整合了集成式hall元件、模拟前端和数据信号处理功能;as5045芯片通过spi与stm32主控芯片通信。本实施例中,磁编码器焊制在驱动装置正中间,体积小易于安装。
27.电源模块外接24v电源并直接为drv8301前置驱动芯片供电;电源模块通过lm2576芯片将24v电源降压为5v并为as5045磁编码器供电;电源模块通过az1117芯片将24v电源降压为3.3v并为eeprom存储器、stm32主控芯片和ch340芯片供电。
28.drv8301前置驱动芯片提供三个半桥驱动器,每个驱动器能够驱动两个n通道mos管,包括两个电流分路放大器,用于精确测量电流;drv8301前置驱动芯片利用采样电阻获取b、c相电流,并通过spi通信将电流数据发送给stm32主控芯片,同时获取stm32主控芯片的三路互补pwm波,生成驱动电压,用于驱动mosfet三相全桥电路。
29.mosfet三相全桥电路中,mosfet采用型号为ntmfs4935nt1g的n沟道mosfet。
30.eeprom存储器通过iic与stm32主控芯片通信,用于实现掉电保存、配置参数数据的功能。采用micro usb接口母座和ch340芯片实现usb配置接口,ch340芯片连接stm32主控芯片的rxd、txd引脚和micro usb接口母座的d+、d
‑
引脚,通过ch340芯片可以将stm32主控芯片输出的ttl电平转为usb电平,使用usb数据线将micro usb接口母座与电脑usb端口相连,可以使电脑获取电机运行数据以及进行参数调整。外设接口通过导线与stm32主控芯片的四个io口相连,可以与其他单片机进行spi通信。提高了带磁编码器的无刷直流电机驱动装置的拓展性。
31.本实施例中,在使用之前,要进行电路检测。首先用万用表测试装置是否有短路,如果有短路,要仔细检查短路的焊点。若无短路,给装置接入24v电源,用万用表测试lm2576的输出电压是否为5v,继续测az1117的输出电压是否为3.3v,若都是正确,则进行下一步。
32.接着,检查stm32主控芯片。先给stm32主控芯片下载可用的程序,若没有出现任何警告和错误,则stm32主控芯片工作正常。
33.接着,检查磁编码器是否工作正常。给stm32主控芯片下载可用程序,然后通过usb配置接口读取电机转子的位置采样数据,并使用磁钢,在磁编码器上方转动,看采集到的数
据以及数据的变化趋势是否正常。
34.检查drv8301前置驱动芯片能否给出足够的驱动电压,给stm32主控芯片下载可用程序,使用示波器查看drv8301前置驱动芯片的输出电压波形的幅值、频率以及占空比是否如程序所写。接着使用示波器查看mosfet三相全桥电路输出是否正常。
35.若没有问题,则整个装置可以正常工作,将驱动装置安装在无刷直流电机正后方,并放置磁钢。利用usb配置接口,在电脑上使用上位机进行无刷直流电机控制器参数调整,发送控制命令,格式为$mode value,mode有位置控制和速度控制模式,value则为相应的给定值,在上位机的控制器参数调整界面,观察实际值与给定值的曲线波形进行参数调整。
36.综上所述,本实用新型提供一种带磁编码器的无刷直流电机驱动装置体积小易于安装、控制精度高、支持在线配置和掉电保存、拓展性强,满足可以作为机器人关机电机驱动装置的需求。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1