执行器的制作方法
1.本公开内容涉及执行器。
背景技术:
2.执行器已经在各种装置中使用。例如,已知其中力控制型执行器设置在关节部处并且其中多个臂经由关节部连结的机器人臂。
3.例如,下面的专利文献1描述了一种包括电机和减速器的旋转执行器。电机包括具有转子和环状定子,转子具有转子轴,环状定子具有在转子侧突出的多个线圈部。减速器具有太阳齿轮和环形齿轮,太阳齿轮附接至转子轴的偏心部,环形齿轮具有与太阳齿轮的外齿啮合的内齿。
4.引文列表
5.专利文献
6.专利文献1:日本未审查专利申请公开第2009-177982号
技术实现要素:
7.顺便提及,期望执行器在具有紧凑构造的同时以低速实现高能量效率。
8.根据本公开内容的一个实施方式的执行器包括定子和转子。定子具有:盘;包括永磁体的柱体;以及缠绕在柱体周围的线圈。转子沿盘的外边缘可移动地设置,其中转子与盘的外边缘接触。线圈被配置成通过线圈的激励形成穿过盘、柱体和转子的磁路。盘包括沿盘的外边缘交替地设置的第一部分和第二部分,其中第一部分具有第一磁导率,并且第二部分具有高于第一磁导率的第二磁导率。
9.在根据本公开内容的一个实施方式的执行器中,当通过对线圈进行激励来形成磁路时,转子接收到其中磁路的电抗接近最小值的力。转子与磁盘的外边缘接触,并且具有第一磁导率的第一部分和具有高于第一磁导率的第二磁导率的第二部分交替地设置在磁盘的外边缘。因此,转子朝向其中磁路的电抗进一步减小的第二部分移动。
附图说明
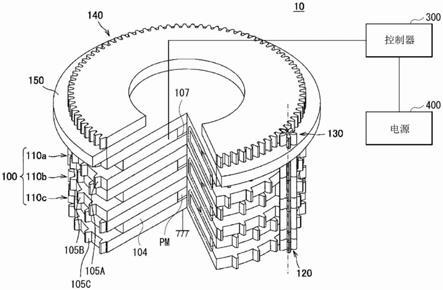
10.[图1]图1是示出根据本公开内容的一个实施方式的执行器的剖面透视图。
[0011]
[图2]图2是示出图1所示的执行器的剖视图。
[0012]
[图3a]图3a是示出图1所示的盘的平面形状的平面图。
[0013]
[图3b]图3b是示出图1所示的盘的平面形状的另一平面图。
[0014]
[图4]图4是示出图1所示的执行器的内部构造的一部分的局部割裂的透视图。
[0015]
[图5]图5是示出执行器的用于描述图1所示的执行器的操作的概要的局部放大的透视图。
[0016]
[图6]图6是用于描述转子的操作原理的示意平面图。
[0017]
[图7]图7是用于描述转子的操作原理的示意剖视图。
[0018]
[图8]图8是以放大方式示出根据第一修改示例(修改示例1)的执行器的主要部分的局部放大透视图。
[0019]
[图9]图9是示出根据第二修改示例(修改示例2)的执行器的透视图。[图10]图10是以放大方式示出根据第三修改示例(修改示例3)的执行器的平面图。
[0020]
[图11]图11是描述根据本公开内容的执行器的应用示例的示意图。
具体实施方式
[0021]
下面,参照附图详细地描述本公开内容的实施方式。将按以下顺序进行描述。
[0022]
1.背景
[0023]
2.一个实施方式
[0024]
2-1.执行器的配置
[0025]
2-2.执行器的操作
[0026]
2-3.效果
[0027]
3.修改示例
[0028]
《1.背景》
[0029]
首先,将描述创建本公开内容的技术的背景。
[0030]
例如,在需要电机、齿轮和制动器这三个功能的情况下,将包括电机、齿轮和制动器的三个独立部件组合在一起以形成执行器。然而,该方法降低了输出扭矩与总重量的比率。
[0031]
因此,本公开内容旨在通过有效地重复使用电机部件而不是使用多个部件来改善输出扭矩与总重量的比率。具体地,首先,行星齿轮(行星齿轮)用作电机的转子并且在将电机的驱动力以预定扭矩输出到外部时还用作齿轮。接下来,通过使用线圈产生磁通量来执行永磁体的磁化和消磁,从而实现所谓的记忆电机。也就是说,使制动器的导通和断开可控。
[0032]
在下文中,将详细描述一个实施方式。
[0033]
《2.一个实施方式》
[0034]
[2-1执行器10的配置]
[0035]
图1示出了根据本公开内容的一个实施方式的执行器10的透视构造的示例。图2示出了通过执行器10的中心的剖面构造的示例。
[0036]
参照图1,执行器10包括定子100、转子120、行星齿轮130、用于输出的太阳齿轮140和例如在大致圆柱形的壳体200中的托架150。然而,它是说明性的并非限制性的,并且例如,执行器10可以不具有壳体200。
[0037]
(定子100)
[0038]
定子100包括:例如,设置成彼此面对的两个盘101和102;包括永磁体pm的柱体103;以及绕柱体103缠绕的线圈104。柱体103和线圈104置于盘101与盘102之间。柱体103设置成竖立在两个盘101和102的表面上。例如,柱体103的上端连结至盘101的中心的附近,并且柱体103的下端连结至盘102的中心的附近。线圈104的外边缘位于盘101的外边缘和盘102的外边缘向内缩回的位置。
[0039]
例如,盘101和102、柱体103以及转子120可以包括除了铁(fe)之外的诸如坡莫合
金(nife)或软铁氧体的高磁导率材料。然而,例如,可以使用各种磁体,例如铝镍钴磁体或硬铁氧体、或钕铁硼作为柱体103中包括的永磁体pm。此外,例如,合适地使用非磁性高电导率材料例如cu作为线圈104的构成材料。
[0040]
例如,如图3a所示,盘101和102均包括具有第一磁导率的第一部分p1和具有高于第一磁导率的第二磁导率的第二部分p2。第一部分p1与第二部分p2沿盘101或102的外边缘交替地设置。盘101的第一部分p1的数目与盘102的第一部分p1的数目彼此相同,并且设置在其中在沿盘101和盘102彼此面对的方向(转子120的旋转轴线方向)观察时第一部分p1彼此交叠的位置。类似地,盘101的第二部分p2的数目和盘102的第二部分p2的数目彼此相同,并且设置在其中在沿盘101和盘102彼此面对的方向(沿转子120的旋转轴线方向)观察时第二部分p2彼此交叠的位置。注意,在本实施方式中,盘101、102均包括作为第一部分p1的间隙106和作为第二部分p2的第一外齿105。注意,图3a是示出图1所示的盘101或102的平面形状的平面图。
[0041]
线圈104被配置成通过线圈104的结论形成穿过盘101和102、柱体103和转子120的磁路fp(稍后描述)。线圈104可以被配置成施加具有大于永磁体pm的矫顽性的磁通密度的磁场。
[0042]
定子100还可以包括在磁路fp的一部分处的检测磁路fp的磁通量的传感器107。在这种情况下,执行器10还可以包括基于由传感器107检测到的磁通量fp来控制要供应至线圈104的电压的控制器300(稍后描述)。例如,可以使用gmr(巨磁阻)元件或霍尔元件作为传感器107。
[0043]
定子100具有其中多个单元110堆叠的结构。多个单元均具有盘101和102、柱体103以及线圈104。具体地,本实施方式例示了其中三个单元110a至110c依次堆叠的结构。要注意的是,多个单元110的数目优选为三个或更多个。这是因为这样的构造允许转子120沿定子100的外边缘平滑地旋转,如稍后将描述的。如图2所示,例如,多个单元110可以由沿堆叠方向穿透各个单元110的中央部分的螺钉s等一体地保持。
[0044]
相应的三个单元110a至110c的形状和尺寸可以彼此基本相同。例如,各个单元u的外周表面的形状彼此基本相同。更具体地,各个单元110的外周表面,即每个单元110的各个盘101和102的外周表面可以布置有基本相同数目的具有基本彼此相同形状的第一外齿105。此外,在沿多个单元110a至110c的堆叠方向(转子120的旋转轴线方向)观察时,单元110a的第一外齿105a、单元110b的第一外齿105b以及单元110c的第一外齿105c被组合成位于彼此不交叠的位置(位于不同的位置)。例如,如图3b所示,期望在沿转子120的旋转轴线方向观察时,三个单元110a至110c的第一外齿105a、第一外齿105b和第一外齿105c的在沿着盘101和102的外边缘的周向方向上的各个间隔基本相等。这是因为这样的构造允许转子120沿定子100的外边缘平滑地旋转,如将在后面描述的。注意,图3b是示出图1所示的单元110a至110c中的盘101和102中的每一个的平面形状的平面图。
[0045]
此外,各个单元110a至110c的线圈104的形状和尺寸可以基本彼此相同。另外,各个单元110a至110c的永磁体pm的形状和尺寸可以彼此基本相同。
[0046]
图4是示出执行器10的内部构造的一部分的局部割裂的透视图。例如,各个单元110a至110c的线圈104经由电源线等从设置在执行器10外部的电源400被激励。另外,例如,对各个单元110a至110c的线圈104的电力供应由设置在执行器10内部的控制器300控制。利
用这些电源400和控制器300,各个单元110a至110c中的线圈104形成穿过盘101和102、柱体103以及转子120的磁路fp。应当注意的是,如果每个线圈104的电流的方向被切换到相反的方向,则流过磁路的磁通量的方向也转到相反的方向,并且各个单元110a至110c的磁极的方向均可能被颠倒。
[0047]
在此,控制器300可以包括诸如cpu(中央处理单元)或gpu(图形处理单元)的处理电路。控制器300可以集中地控制执行器10的操作。注意,控制器300不限于其中控制器300设置在执行器10内部的示例,并且可以布置在执行器10外部。另外,电源400也不限于其中电源400设置在执行器10外部的示例,并且可以设置在执行器10内部。控制器300对相应的多个单元110a至110c中的线圈104依次进行激励以形成多个单元110a至110c中的磁路fp。
[0048]
(转子120)
[0049]
转子120沿盘101和102的外边缘可移动地设置,其中转子120与盘101和102的外边缘接触。具体地,转子120沿盘101和102的外边缘转动,同时围绕沿其中盘101和盘102彼此面对的方向延伸(即,沿多个单元110a至110c的堆叠方向延伸)的旋转轴线120j旋转。
[0050]
如图3b等所示,例如,转子120包括与第一外齿105啮合的第二外齿121(121a至121e),并且转子120随着第二外齿121与盘101和102的第一外齿105啮合而旋转和转动。注意,转子120沿旋转轴线120j具有相同的形状,并且与相应的多个单元110a至110c的盘101和102的外边缘接触。然而,第二外齿121与第一外齿105a啮合的时刻、第二外齿121与第一外齿105b啮合的时刻、以及第二外齿121与第一外齿105c啮合的时刻彼此不同。也就是说,第二外齿121不会同时与第一外齿105a至105c啮合。
[0051]
转子120还具有高于盘101和102的外边缘的第一部分p1的第一磁导率的第三磁导率。例如,转子120的第三磁导率可以与盘101和102的第二部分p2(即,第一外齿105)的第二磁导率相同。
[0052]
(行星齿轮130)
[0053]
行星齿轮130根据转子120的旋转而围绕定子100的中心轴线旋转,其中行星齿轮130与太阳齿轮140啮合。另外,行星齿轮130的外齿1300的数目和转子120的第二外齿121的数目可以设计为彼此相同。
[0054]
在此,布置在定子100的外周表面上的第一外齿105的数目可以设计为比太阳齿轮140的外周表面的齿1400的数目少预定数目。例如,太阳齿轮140的齿的数目可以为n+1,其中定子100的第一外齿105的数目为n。
[0055]
(太阳齿轮140)
[0056]
如图1所示,相对于定子100的中心轴线,与行星齿轮130相比,太阳齿轮140设置成在更内侧。另外,太阳齿轮140随着太阳齿轮140的外周表面的齿1400与行星齿轮130的外齿1300啮合而旋转。例如,太阳齿轮140的旋转轴线与定子100的中心轴线同轴。在此,减速比g由下式表示:
[0057]
g=(np
·
ns1)/{(np
·
ns1)-(ns2
·
np)}
[0058]
其中行星齿轮130的外齿1300的齿数为np,定子100的第一外齿105的数目为ns1,并且太阳齿轮140的齿1400的数目为ns2。
[0059]
太阳齿轮140可以围绕定子100的中心轴线可旋转地支承。例如,如图2所示,轴承142设置在壳体200与太阳齿轮140之间。在这种情况下,轴承142关于定子100的中心轴线可
旋转地支承太阳齿轮140。
[0060]
此外,太阳齿轮140可以连结到执行器10的输出轴(未示出)。然而,它是说明性的和非限制性的,并且太阳齿轮140可以是执行器10的输出轴。
[0061]
(托架150)
[0062]
托架150是环形的。托架150固定在转子120与行星齿轮130之间。
[0063]
托架150可以围绕定子100的中心轴线可旋转地支承。例如,如图2所示,轴承152设置在壳体200与托架150之间。在这种情况下,轴承152围绕定子100的中心轴线可旋转地支承托架150。根据以上构造,当转子120开始围绕定子100的中心轴线旋转时,转子120的旋转力被传递至固定到转子120的托架150。因此,托架150与转子120一起可以围绕定子100的中心轴线旋转,例如,如图5中的箭头指示的。
[0064]
注意,虽然图2示出了其中一个托架150设置在沿定子100的轴线方向的每个端侧上的示例,但是本实施方式不限于这样的示例。例如,如图1所示,仅一个托架150可以设置在沿定子100的轴线方向的一个端侧上(在太阳齿轮140侧上)。
[0065]
(壳体200)
[0066]
如图2所示,定子100、转子120、太阳齿轮140、轴承142、轴承152等可以设置在壳体200中。另外,壳体200可以支承定子100、轴承142、轴承152等。注意,壳体200的形状没有特别限制。例如,壳体200可以是圆柱形的或棱柱形的(例如,四角棱柱)。
[0067]
[2-2执行器10的操作]
[0068]
接下来,参照图5至图7,将描述基于上述构造的执行器10的操作。
[0069]
(概要)
[0070]
首先,参照图5,将描述执行器10的操作的概要。图5是示出执行器10的用于描述执行器10的操作的概要的局部放大的透视图。当相应的三个单元110a至110c的磁路fp依次形成在转子120的与相应的三个单元110a至110c对应的位置时,转子120开始沿定子100的外边缘旋转,其中转子120的第二外齿121依次与定子100的第一外齿105a至105c啮合。然而,应当注意的是,图5仅示出了单元110a的第一外齿105a。因此,与转子120的中心轴线同轴连结的行星齿轮130开始围绕定子100的中心轴线(与转子120一起)旋转,其中行星齿轮130与太阳齿轮140啮合。因此,太阳齿轮140也开始围绕定子100的中心轴线旋转。此时,输出扭矩可以根据定子100的第一外齿105的数目与太阳齿轮140的齿的数目之间的比率(减速比)而增加。
[0071]
另外,转子120的旋转还可以允许托架150围绕定子100的中心轴线(与转子120一起)旋转。
[0072]
(转子120的旋转原理)
[0073]
接下来,参照图6和图7,将更详细地描述转子120的旋转原理。图6是用于描述转子120的操作原理的示意平面图。更具体地,图6示出了在执行器10的操作期间在每个时间t=t1、t=t2、t=t3的盘101和102的第一外齿105与转子120(的第二外齿121)之间的位置关系。图7是用于描述转子120的操作原理的示意剖视图。更具体地,图7示出了在执行器10的操作期间在每个时间t=t1、t=t2、t=t3的盘101和102的第一外齿105与转子120(的第二外齿121)之间的位置关系。注意,图6和图7示出了其中时间t1和时间t2之间的间隔、时间t2与时间t3之间的间隔以及时间t3与时间t1之间的间隔都相等的示例。
[0074]
首先,如图6的最左图和图7的最左图所示,假设转子120的第二外齿121在时间t1与单元110a的第一外齿105a啮合。在这种状态下,当在控制器300的控制下单元110a至110c中的仅单元110b的线圈104被接通时,在单元110b内部形成磁路fp,如图7的最左图所示。此时,在单元110a的永磁体pm被磁化的情况下,单元110a的永磁体pm被消磁。在这种情况下,例如,大于单元110a的永磁体pm的矫顽性的消磁脉冲可以被施加到单元110a的永磁体pm。当单元110b的线圈104被接通时,转子120接收到单元110b的磁路fp的电抗接近最小值的力。也就是说,如图6的最左图所示,转子120在围绕旋转轴线120j旋转的同时,朝向与单元110b中的间隙106b(图1)相比具有较高磁导率的第一外齿105b移动。为方便起见,此操作将被称为阶段1。
[0075]
此外,在阶段1中,当单元110b的线圈104被通电以形成磁路fp时,具有超过单元110b的永磁体pm的矫顽性的强度的磁场被施加到单元110b的永磁体pm,并且永磁体pm沿磁路fp被磁化。因此,充分增加了干扰(制动)转子120的旋转操作的力。以这种方式增加对转子120的制动力的原因是由于永磁体pm的磁化永磁体pm产生吸引转子120的力。因此,转子120试图保持与第一外齿105b啮合。
[0076]
在随后的时间t2,如图6的中间图和图7的中间图所示,作为上述阶段1的结果,转子120的第二外齿121与单元110b的第一外齿105b啮合。在这种状态下,在控制器300的控制下,单元110b的线圈104被断开并且仅单元110c的线圈104被接通。此时,单元110b的永磁体pm被消磁。在这种情况下,例如,大于单元110b的永磁体pm的矫顽性的消磁脉冲可以被施加到单元110b的永磁体pm。因此,如图7的中间图所示,单元110b内部的磁路fp消失,并且在单元110c内部形成磁路fp,这又使转子120接收到其中单元110c的磁路fp的电抗接近最小值的力。也就是说,如图6的中间图所示,转子120在围绕旋转轴线120j旋转的同时,朝向与单元110c中的间隙106c(图1)相比具有较高磁导率的第一外齿105c移动。为方便起见,此操作将被称为阶段2。
[0077]
在随后的时间t3,如图6的最右图和图7的最右图所示,作为上述阶段2的结果,转子120的第二外齿121与单元110c的第一外齿105c啮合。在这种状态下,在控制器300的控制下,单元110c的线圈104被断开并且仅单元110a的线圈104被接通。此时,单元110c的永磁体pm被去磁。在这种情况下,例如,大于单元110c的永磁体pm的矫顽性的消磁脉冲可以被施加到单元110c的永磁体pm。因此,如图7的最右图所示,单元110c内部的磁路fp消失,并且在单元110a内部形成磁路fp,这又使转子120接收到其中单元110a的磁路fp的电抗接近最小值的力。也就是说,如图6的最右图所示,转子120在围绕旋转轴线120j旋转的同时,朝向与单元110a的间隙106a(图1)相比具有较高磁导率的第一外齿105a移动。为方便起见,此操作将被称为阶段3。
[0078]
此后,可以通过依次重复上述阶段1至3来继续转子120的旋转。
[0079]
另外,例如,在阶段1、阶段2或阶段3完成时的任何时刻,当在不对线圈104中的任一线圈进行激励的情况下,通过向所有永磁体pm施加大于永磁体pm中的每个永磁体pm的矫顽性的消磁脉冲来使所有永磁体pm进入消磁状态时,可以通过从外部施加力来使转子120或太阳齿轮140几乎没有阻力地自由地旋转。然而,每个齿轮之间的摩擦阻力和每个齿轮的惯性阻力是不可避免的。此外,每个齿轮之间的摩擦阻力和惯性阻力被定子100、行星齿轮130和太阳齿轮140的齿轮比放大。
[0080]
如果在阶段1、阶段2或阶段3完成时的任何时刻都不切换要通电的线圈104,则可以固定状态,即,转子120的位置。也就是说,可以使用执行器10作为制动器。
[0081]
[2-3执行器10的效果]
[0082]
如上所述,根据本实施方式的执行器10,可以使用执行器10作为三个装置即电机、齿轮和制动器的集成。因此,例如,与收集包括电机、齿轮和制动器的三个独立部件的情况相比,这些部件是共享的。因此,可以提高输出扭矩与总重量的比率。
[0083]
另外,执行器10具有在非常短的时间内使线圈104起作用就足以使永磁体pm磁化的结构。因此,可以降低功耗,尤其是在低速运行时。
[0084]
另外,可以通过线圈104的导通/断开操作来设置永磁体pm的磁化和消磁。因此,例如,可以容易地实现旋转转子120和太阳齿轮140的操作,以及例如,制动转子120和太阳齿轮140的操作。
[0085]
另外,通过为每个单元110设置至少一个永磁体pm,使得操作成为可能。因此,在减轻重量和降低成本方面是有利的。
[0086]
《3.修改示例》
[0087]
(修改示例1)
[0088]
在上述一个实施方式中,已经描述了其中托架150支承转子120的示例,但是本公开内容不限于这样的示例。例如,如图8所示的执行器10a那样,相对于转子120设置在定子100的相对侧上的环形齿轮160可以可旋转地保持转子120。
[0089]
(修改示例2)
[0090]
在上述实施方式中,已经主要描述了其中执行器10包括如图1等所示的仅一个转子120的示例,但是本公开内容不限于这样的示例。例如,多个转子120可以与图9所示的执行器10b一起提供。图9是示出根据修改示例2的执行器10b的外部构造的示例的图。
[0091]
参照图9,在修改示例2中,各个转子120均可以围绕定子100的中心轴线旋转,其中布置在转子120的外周表面上的齿与布置在定子100的外周表面上的第一外齿105啮合。另外,多个转子120均可以沿定子100的外周表面的周向方向以彼此基本相等的间隔设置。
[0092]
例如,根据修改示例2的执行器10b包括大量转子120和大量行星齿轮130,如图9所示。这是有利的,因为大量行星齿轮130均随着大量行星齿轮130与太阳齿轮140啮合而旋转,因此太阳齿轮140不易破裂。例如,在现有的波动齿轮减速器中,在输入轴侧的外齿轮(更详细地说,柔性齿轮)和在输出轴侧的内齿轮(更详细地说,刚性齿轮)随着仅两个齿彼此啮合而旋转。相反,在根据修改示例2的执行器10b中,大量行星齿轮130中的每一个和太阳齿轮140在彼此啮合在一起的同时旋转。因此,与现有的波动齿轮减速器相比,每个齿轮不太可能破裂。
[0093]
另外,根据修改示例2的执行器10b可以包括数目大于现有行星齿轮减速器中的行星齿轮的数目的行星齿轮130。因此,与现有的行星齿轮减速器相比,每个齿轮不太可能破裂。
[0094]
(修改示例3)
[0095]
此外,在根据上述一个实施方式的执行器10中,具有第一外齿105的外齿齿轮被用作盘101和102;然而,本公开内容不限于此。例如,可以使用例如如图10所示的根据修改示例3的执行器10c的盘210那样的盘状构件。在盘210中,具有第一磁导率的第一部分p1和具
有高于第一磁导率的第二磁导率的第二部分p2交替地布置在盘210的外边缘。在此,盘210具有光滑外周表面。第二部分p2包括诸如软铁氧体的高磁导率材料。另外,作为第一部分p1,可以使用诸如树脂和/或铝的非磁性材料。此外,在使用盘210的情况下,可以使用具有光滑外周表面的大致圆柱形转子220,而不是作为外齿齿轮的转子120。
[0096]
[工业适用性]
[0097]
根据本公开内容的执行器具有如下工业实用性。
[0098]
根据本公开内容的执行器可应用于例如图11所示的机器人臂1001。图11是示出机器人臂1001的整体构造的示例的示意图。机器人臂1001具有其中基端部1002、中间部1003、中间部1004和前端部1005按此顺序连结的结构。为方便起见,将其中基端部1002、中间部1003、中间部1004和前端部1005按顺序连结的结构称为臂单元。除了臂单元之外,例如,机器人臂1001还包括控制器1007和电源1008。
[0099]
例如,基端部1002具有:要固定于地板表面等的基部1002a;旋转部1002b;和关节部1002d。在此,根据本公开内容的执行器10可以设置在关节部1002d处。旋转部1002b是具有大致圆柱形状的构件并且相对于基部1002a沿箭头指示的旋转方向r1002可旋转地设置。关节部1002d固定至旋转部1002b并且与旋转部1002b一体地沿旋转方向r1002旋转。臂部1003a附接至关节部1002d。臂部1003a通过设置在关节部1002d处的执行器10围绕关节部1002d沿箭头指示的旋转方向r1003可旋转地设置。
[0100]
除了臂部1003a之外,中间部1003还具有关节部1003b。中间部1004具有臂部1004a和关节部1004b。在此,根据本公开内容的执行器10也可以设置在关节部1003b和关节部1004b处。前端部1005包括主体1005a和操纵器1005b。
[0101]
在机器人臂1001中,内置在每个关节部1002d、1003b和1004b中的每一个中的执行器10在控制器1007的控制下是可驱动的。机器人臂1001在实现紧凑和轻量化的构造的同时使其可以实现高输出扭矩,尤其在低速运行时,这有利于减轻重量和降低成本。此外,机器人臂1001通过线圈104的导通/断开控制可以使用执行器10作为制动装置。因此,机器人臂1001高度安全,适合用作在公共环境中执行各种操作的装置。适用性的示例包括:在商店等中协助运输工作等;室内和室外的农业工作;医疗实践;运输工作;货物装卸工作;在室内或室外的产品等的外观检查工作。
[0102]
尽管已经参考实施方式及其修改示例具体描述了本公开内容,但是本公开内容不限于以上实施方式等,并且可以进行各种修改。
[0103]
例如,以上实施方式及其修改示例中描述的构造、形状、材料、数值等仅为说明性的,并且可以根据需要使用与这些不同的构造、形状、材料、数值等。
[0104]
另外,可以将上述实施方式及其修改示例的构造等彼此组合,只要它们不脱离本公开内容的主旨即可。
[0105]
例如,上述实施方式例示了柱体103由传感器107和永磁体pm的堆叠构造构成的情况,如图2所示,但是本公开内容不限于此。例如,所有柱体103可以由永磁体pm构成,或者柱体103可以包括除了永磁体pm和传感器107之外的任何其他部件。
[0106]
如上所述,根据本公开内容的一个实施方式的磁记录介质使其可以减小整体厚度,并且即使在执行重复记录或重复复制之后也可以保持良好的电磁转换特性。
[0107]
注意,本公开内容的效果不限于此,并且本说明书中描述的任何效果都可以满足。
此外,本技术可以被配置如下。
[0108]
(1)一种执行器,包括:
[0109]
定子,所述定子具有盘、包括永磁体的柱体以及缠绕在所述柱体周围的线圈;以及
[0110]
转子,所述转子沿所述盘的外边缘可移动地设置,并且所述转子与所述盘的外边缘接触,其中,
[0111]
所述线圈被配置成通过所述线圈的通电来形成穿过所述盘、所述柱体和所述转子的磁路,并且
[0112]
所述盘包括沿所述盘的外边缘交替地设置的第一部分和第二部分,所述第一部分具有第一磁导率,所述第二部分具有高于所述第一磁导率的第二磁导率。
[0113]
(2)根据(1)所述的执行器,其中,所述定子还包括传感器,所述传感器设置在所述磁路的一部分处并且检测所述磁路的磁通量。
[0114]
(3)根据(1)所述的执行器,还包括控制器,所述控制器基于由所述传感器检测到的磁通量来控制要供应到所述线圈的电压。
[0115]
(4)根据(1)至(3)中任一项所述的执行器,其中,所述定子具有其中多个单元堆叠的构造,所述多个单元每个都具有所述盘、所述柱体和所述线圈。
[0116]
(5)根据(4)所述的执行器,还包括控制器,所述控制器通过使所述多个单元中的每个单元中的线圈依次通电来在所述多个单元中形成磁路并且磁化所述永磁体。
[0117]
(6)根据(5)所述的执行器,其中,在使所述多个单元中的每个单元中的线圈依次通电时,所述控制器使先前磁化的永磁体消磁。
[0118]
(7)根据(4)至(6)中任一项所述的执行器,其中,所述转子与所述多个单元中的每个单元中的盘的外边缘接触。
[0119]
(8)根据(4)至(7)中任一项所述的执行器,其中,所述多个单元中的每个单元的盘的第二部分位于在沿所述多个单元的堆叠方向观察时彼此不同的位置处。
[0120]
(9)根据(4)至(8)中任一项所述的执行器,其中,所述多个单元包括三个或更多个单元。
[0121]
(10)根据(4)至(9)中任一项所述的执行器,其中,
[0122]
所述盘包括作为所述第一部分的第一外齿和作为所述第二部分的间隙,并且
[0123]
所述转子包括与所述第一外齿啮合的第二外齿。
[0124]
(11)根据(1)至(10)中任一项所述的执行器,其中,所述线圈被配置成施加具有大于所述永磁体的矫顽力的磁通密度的磁场。
[0125]
(12)根据(1)至(11)中任一项所述的执行器,其中,所述转子具有高于所述第一磁导率的第三磁导率。
[0126]
(13)根据(1)至(12)中任一项的执行器,其中,
[0127]
所述盘包括第一盘和第二盘,并且
[0128]
所述柱体与所述线圈被置于所述第一盘与所述第二盘之间。
[0129]
(14)根据(1)至(13)中任一项所述的执行器,还包括环形齿轮,所述环形齿轮将所述转子可旋转地保持在所述环形齿轮与所述定子之间。
[0130]
本技术要求于2019年9月11日向日本专利局提交的日本在先专利申请jp2019-165309的优先权,其全部内容通过引用并入本文。
[0131]
本领域技术人员应当理解的是,根据设计要求和其他因素,可以进行各种修改、组合、子组合和变更,只要该修改、组合、子组合和变更在所附权利要求或其等同物的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1