起动器发电机控制单元(SGCU)随机化电流反馈控制的制作方法
起动器发电机控制单元(sgcu)随机化电流反馈控制
背景技术:
1.高效且强大的电起动器发电机(sg)是通常所期望的。存在不同类型的sg,诸如有刷型sg和无刷型sg。可以使用无刷电机控制算法来控制无刷型sg。通常,sg控制器通过如下方式来控制sg:使用相对转子和/或定子位置信息以及相电流和/或电压信息来控制逆变器脉冲宽度调制(pwm)。在供应给逆变器的给定直流(dc)电源电压的情况下,通过控制输出电压超前角并且通过控制电流来控制电机扭矩。
2.基于电流反馈调整相电流是以给定的恒定间隔来执行的。在发动机起动期间,sg速度从0rpm变为起动截止速度rpm或阈值rpm。这有效地创建了应用于sg、变速箱和发动机系统的频率扫描。然而,恒定反馈控制更新频率、发动机加速度和系统机械共振之间的相互作用可能产生不稳定的sg操作,存在很大这种可能性。当控制回路在发动机加速期间以规则、相等的间隔调整逆变器pwm时,可能会发生共振。这种共振行为可能会导致发动机起动不成功,从而导致起动中止,或者可能导致发电机轴的剪切。
3.此外,典型的方法经常需要加强的软件控制算法,该算法主动调整控制参数(即,电流和超前角)以避免共振行为。这种方法的另一个缺点是相关联的复杂性和对软件的依赖性。
技术实现要素:
4.根据一个方面,起动器发电机控制单元可以包括:比较器、脉冲宽度调制(pwm)占空比发生器、随机化器和定序器。比较器可以接收来自电流传感器的电流读数和来自目标电流查找表的目标电流,并基于电流读数与目标电流之间的比较来生成指示脉冲宽度调制(pwm)占空比的电流值的增加或减少的输出比较器信号。pwm占空比发生器可以接收来自比较器的信号并生成输出pwm信号。随机化器可以生成随机时变更新信号。pwm占空比发生器可以接收随机时变更新信号,并且随机时变更新信号可以控制与pwm占空比发生器相关联的周期时间。定序器可以接收输出pwm信号并基于输出pwm信号来生成用于控制逆变器的栅控信号。
5.起动器发电机控制单元可以包括驱动随机化器的时钟。该时钟可以是伪随机时钟。定序器可以接收与由逆变器驱动的起动器发电机相关联的位置角,并基于该位置角来生成用于控制逆变器的栅控信号。起动器发电机控制单元可以接收与由逆变器驱动的起动器发电机相关联的旋转速度。来自目标电流查找表的目标电流可以由起动器发电机控制单元基于与由逆变器驱动的起动器发电机相关联的旋转速度来确定。起动器发电机可以包括确定旋转速度的旋转变压器。旋转速度可以是与起动器发电机相关联的位置角的时间导数。逆变器可以与n个相位相关联。输出比较器信号可以与递增或递减相关联。
6.根据一个方面,一种用于起动器发电机控制单元随机化电流反馈控制的系统可以包括比较器、脉冲宽度调制(pwm)占空比发生器、随机化器、逆变器和定序器。比较器可以接收来自电流传感器的电流读数和来自目标电流查找表的目标电流,并基于电流读数与目标电流之间的比较来生成指示脉冲宽度调制(pwm)占空比的电流值的增加或减少的输出比较
器信号。pwm占空比发生器可以接收来自比较器的信号并生成输出pwm信号。随机化器可以生成随机时变更新信号。pwm占空比发生器可以接收随机时变更新信号,并且随机时变更新信号可以控制与pwm占空比发生器相关联的周期时间。定序器可以接收输出pwm信号并基于输出pwm信号来生成用于控制逆变器的栅控信号。
7.用于起动器发电机控制单元随机化电流反馈控制的系统可以包括驱动随机化器的时钟。该时钟可以是伪随机时钟。定序器可以接收与由逆变器驱动的起动器发电机相关联的位置角,并基于该位置角来生成用于控制逆变器的栅控信号。起动器发电机控制单元可以接收与由逆变器驱动的起动器发电机相关联的旋转速度。来自目标电流查找表的目标电流可以由起动器发电机控制单元基于与由逆变器驱动的起动器发电机相关联的旋转速度来确定。起动器发电机可以包括确定旋转速度的旋转变压器。旋转速度可以是与起动器发电机相关联的位置角的时间导数。逆变器可以与n个相位相关联。
8.一种用于起动器发电机控制单元随机化电流反馈控制的方法可以包括:使用比较器接收来自电流传感器的电流读数和来自目标电流查找表的目标电流,并且基于电流读数与目标电流之间的比较来生成指示脉冲宽度调制(pwm)占空比的电流值的增加或减少的输出比较器信号,使用pwm占空比发生器接收来自比较器的信号并生成输出pwm信号,使用随机化器生成随机时变更新信号,并使用pwm占空比发生器接收随机时变更新信号。随机时变更新信号可以控制与pwm占空比发生器相关联的周期时间。该方法可以包括使用定序器接收输出pwm信号并基于输出pwm信号来生成用于控制逆变器的栅控信号。
附图说明
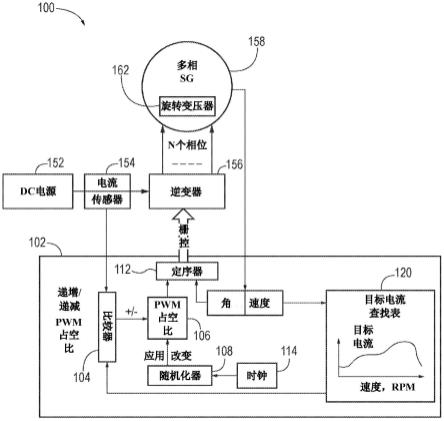
9.图1是根据一个方面的用于起动器发电机控制单元(sgcu)随机化电流反馈控制的系统的示例性组件图。
10.图2是根据一个方面的用于起动器发电机控制单元(sgcu)随机化电流反馈控制的方法的示例性流程图。
具体实施方式
11.可以使用无刷电机控制算法来控制无刷型起动器发电机(sg)。当无刷sg在起动器操作模式下操作时,可以优化无刷电机控制算法以有效地驱动无刷发电机。
12.无刷sg通常可以针对在发电模式下的操作进行优化,因为无刷sg通常在大于90%的时间内操作在发电模式下。根据一个方面,起动器发电机控制单元(sgcu)可以被设计成通过实现使用随机化电流反馈来控制sg的sg控制器来提供高起动扭矩。换言之,本文所描述的系统和技术不是使用规则的、相等的脉冲宽度调制(pwm)调整间隔,而是实现不规则的调整间隔,其可以由被实现为硬件的伪随机时钟来管控。以这种方式,可以减轻起动系统共振行为,从而提高发动机和sg的可靠性。
13.图1是根据一个方面的用于起动器发电机控制单元(sgcu)随机化电流反馈控制的系统100的示例性组件图。用于sgcu随机化电流反馈控制的系统100可以在发动机起动模式期间控制无刷sg。用于sgcu随机化电流反馈控制的系统100可以包括控制器102。控制器102可以包括比较器104、脉冲宽度调制(pwm)占空比发生器106、随机化器108、定序器112和时钟114。
14.在图1中,可以看出直流(dc)电源152向逆变器156提供dc功率,该逆变器156驱动可以与n个相位相关联的多相起动器发电机(sg)158。用于sgcu随机化电流反馈控制的系统100可以包括控制逆变器156的sgcu或控制器102。例如,用于sgcu随机化电流反馈控制的系统100可以在发动机起动模式期间通过控制从dc电源152提供给逆变器156的电流来控制无刷sg 158。
15.电流传感器154可以测量与dc电源152相关联的电流,并提供该测量作为对控制器102的输入。此外,多相sg 158可以经由多相sg的旋转变压器162提供位置角和旋转速度(例如,位置角的时间导数)作为对控制器102的输入。旋转速度可以是与sg相关联的位置角的时间导数。sg 158可以包括确定位置角和/或旋转速度的旋转变压器162。换言之,当sg 158旋转时,安装有sg的旋转变压器162可以向控制器102提供位置角和位置角时间导数或旋转速度。sgcu可以接收与由逆变器驱动的sg 158相关联的旋转速度156。
16.如图1中所见,闭环控制系统可以被利用来实现dc源电流反馈控制。位置角可以被利用来控制定序器112,并且因此控制用于逆变器晶体管的逆变器栅极驱动信号的定序。
17.使用由多相sg的旋转变压器162提供的位置角,控制器102可以经由查找表来确定目标电流,该查找表可以被存储在控制器102的存储驱动器120中。查找表可以指示给定多相sg的旋转速度下的目标电流。以这种方式,控制器102可以基于位置角和/或旋转速度的输入以及查找表来确定目标电流值。换言之,旋转速度可以被用来寻址存储在控制器102的存储器或存储驱动器120中的目标电流查找表以及由控制器102的处理器执行的与其相关联的计算。根据一个方面,目标电流值随着查找表内的旋转速度的变化而变化。以这种方式,控制器102可以以一种方式通过控制逆变器pwm来调节源电流,以使得电源瞬时电流值等于来自查找表中的目标电流值。来自目标电流查找表中的目标电流可以由sgcu基于与由逆变器156驱动的sg 158相关联的旋转速度来确定。
18.控制器102内的比较器104可以将目标电流值和与由dc源电流传感器输出所提供的dc电源152相关联的电流进行比较。比较器104可以确定是增加还是减少pwm占空比的电流值。比较器104可以基于增加或减少逆变器输入电流的需要来确定是增加还是减少pwm占空比的电流值。例如,每当确定电流校正时,pwm占空比可以被递增或递减相同的量。比较器104可以接收来自电流传感器154的电流读数和来自目标电流查找表的目标电流(例如,根据其他方面,其可以被存储在存储驱动器120中或由控制器102接收)并基于电流读数与目标电流之间的比较来生成指示pwm占空比的电流值的增加或减少的输出比较器信号。
19.可以运行递增或递减控制回路,直到pwm调整导致受控变量(例如,来自查找表的目标电流)和测量到的反馈值(例如,从电流传感器154测量到的电流)之间的匹配。
20.控制器102内的随机化器108可以(基于时钟114)生成随机时变更新信号,该更新信号可以被馈送到pwm占空比生成器106,指示何时利用来自比较器104的新调整来更新脉冲宽度。用于sgcu随机化电流反馈控制的控制器102可以包括驱动随机化器108的时钟114。时钟114可以是伪随机时钟。
21.pwm占空比发生器106可以接收随机时变更新信号,并且随机时变更新信号可以控制与pwm占空比发生器106相关联的周期时间。pwm占空比发生器106可以接收来自比较器104的信号并生成输出pwm信号。pwm占空比发生器106的输出为定序器112提供所产生的脉冲宽度,其继而改变从dc源汲取的电流量。随机化反馈校正的使用减轻了起动器发电机或
sg 158在速度加速期间的共振以及不希望的扭矩波动的产生。
22.定序器112可以接收输出pwm信号并且基于输出pwm信号来生成用于控制逆变器156的栅控信号。定序器112可以接收与由逆变器156驱动的sg 158相关联的位置角,并且基于该位置角来生成用于控制逆变器156的栅控信号。
23.根据一个方面,随机化器108可以改变与电池电流值的更新频度相关联的频率。例如,可以提供控制脉冲,该控制脉冲使得能够改变电池电流值的更新。可以实现电池电流反馈信号(例如,battery_current_feedback_logic)以控制用于sgcu随机化电流反馈控制的系统100的现场可编程门阵列(fpga)设计。可以提供电池电流反馈信号,以使得如果超过中点,则减小电流,并且如果低于中点,则将电流增加递增量(例如,针对每个采样周期为+/-1递增量或单位)。
24.这种变化的示例可以包括:等待1ms直到下一次更新、等待2ms直到下一次更新、等待3ms直到下一次更新、等待4ms直到下一次更新等。随机化器108可以对控制脉冲的周期时间因周期而异地进行控制。这可以例如使用随机化器108内的伪随机数发生器来实现。随机化器108可以包括控制定序器112的状态机。例如,伪随机数发生器的输出信号(例如,prng_to_start_batt_curr_fb_correction)可以被固件模块sm_battery_current_feedback利用,该固件模块可以是状态机,其充当电池电流反馈算法的定序器112的控制器102。
25.以这种方式,可以减轻或避免在由控制回路调整所引起的发动机起动或sg 158速度加速期间的机械和/或电共振。起动器扭矩波动可以显著降低,从而提高用于sgcu随机化电流反馈控制的系统100的可靠性。
26.图2是根据一个方面的用于sgcu随机化电流反馈控制的方法200的示例性流程图。用于起动器发电机控制单元随机化电流反馈控制的方法200可以包括:使用比较器接收202来自电流传感器的电流读数和来自目标电流查找表的目标电流,以及基于电流读数与目标电流之间的比较来生成204指示脉冲宽度调制(pwm)占空比的电流值的增加或减小的输出比较器信号,使用pwm占空比发生器106接收来自比较器的信号并生成206输出pwm信号,使用随机化器生成208随机时变更新信号,并且使用pwm占空比发生器106接收随机时变更新信号。随机时变更新信号可以控制与pwm占空比发生器106相关联的周期时间。方法200可以包括使用定序器接收输出pwm信号并且基于输出pwm信号来生成210用于控制逆变器的栅控信号。
27.同样,用于sgcu随机化电流反馈控制的方法200的实现可以通过在起动模式期间使用随机时基以将反馈回路校正应用到起动器发电机或sg控制器来减轻在起动发动机加速期间的机械和/或电共振耦合。
28.应当了解,各种上述和其他特征和功能,或者其替代物或变体,可以期望地组合到许多其他不同的系统或应用中。此外,本领域技术人员随后可以在其中做出各种目前未预见或未预料到的替代、修改、变型或改进,其也旨在被以下权利要求所涵盖。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1