摩擦非对称型惯性压电直线驱动装置与方法
1.本发明涉及精密机械领域,特别涉及一种摩擦非对称型惯性压电直线驱动装置与方法,可用于精密/超精密加工、精密光学与仪器、显微操作、生物医学工程等领域。
背景技术:
2.兼具大行程与高精度的驱动装置在科学界与工业界均具有十分重要的应用与需求。步进式压电精密驱动装置因具有精度高、响应快、结构简单且灵活、控制简单等诸多优势,在精密加工与装配、微纳操作、精密机械与仪器等领域广泛采用。步进式压电驱动装置依据驱动原理不同,主要包括尺蠖式、粘滑式、超声式和惯性式。虽然驱动原理各有不同,但上述压电驱动装置均是通过步进位移累积的方式来实现大行程。尺蠖式压电驱动装置一般易实现大的输出力,输出位移无回退,但是其结构和装配相当复杂,限制了其实际应用。粘滑式压电驱动装置结构和控制相对简单,设计也比较灵活,但是其输出位移存在回退,而且输出力较低。超声式压电驱动装置工作在共振态下,其设计较为复杂,而且定位分辨率和精度较低,同时高频运转动子和定子接触导致的摩擦磨损严重。惯性式压电驱动器结构和控制也较为简单,但是目前大部分的惯性式压电驱动装置存在具有倾覆力矩和大质量悬臂问题,造成整个驱动装置运动不稳定。如文献(a low
‑
frequency structure
‑
control
‑
type inertial actuator using miniaturized bimorph piezoelectric vibrators,ieee transactions on industrial electronics,2019,66,6179
‑
6188)利用压电双晶片作为驱动源,设计了一款惯性式压电驱动装置,该装置虽能够实现大行程,但是含有大质量的悬臂,限制了驱动装置的工作频率带宽,同时易引起系统振动。文献(inertial linear actuator driver by piezoelectric stack with changeable friction coefficients,nanotechnology and precision engineering,2008,6(3),190
‑
194)采用压电叠堆和质量块为动力元件,设计了一款摩擦系数变化式惯性直线压电驱动装置,该装置虽能够实现精密的驱动,但装置的动力元件部分带有大质量的质量块,运动过程中容易产生倾覆力矩,造成系统的不稳定,影响其输出性能。综上可以看出,研制出具有稳定、大行程、高速、大负载、结构简单、易于控制、无倾覆力矩和大质量悬臂问题的惯性压电直线驱动装置目前依旧是个难点,也是急迫需要解决的难题。
技术实现要素:
3.本发明的目的在于提供一种摩擦非对称型惯性压电直线驱动装置与方法,解决了现有技术存在的上述问题。本发明将带有两对左右刚度不同驱动足的非对称柔性铰链机构预紧到u形槽内,以期在运动过程中产生非对称摩擦,基于惯性冲击运动原理,实现驱动装置的大行程稳定输出。该装置控制简单,通过连续的锯齿形驱动电压可实现大行程直线步进运动,改变锯齿形驱动电压的对称性,能够实现装置的反向运动。本发明的摩擦非对称型惯性压电直线驱动装置具有结构精巧、易于加工和装配、控制简单、成本低等优点,能够实现稳定、高速、双向、大行程、大负载、无回退的连续直线步进运动。
4.本发明为实现上述目的采用的技术方案如下:
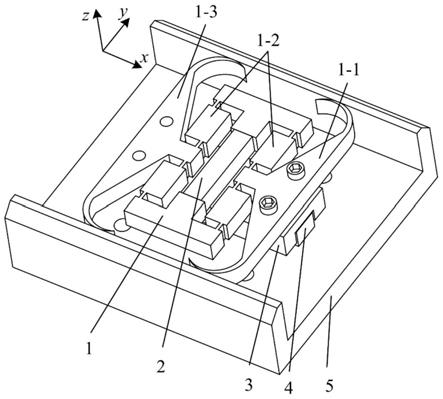
5.摩擦非对称型惯性压电直线驱动装置,包括基础单元、驱动单元、滑块3;所述的驱动单元通过螺钉与滑块3连接;所述的滑块3在基础单元的导轨4上滑动;所述的驱动单元通过过盈配合的方式安装在基础单元的u形槽5内。
6.所述的基础单元包括导轨4和u形槽5;所述的导轨4通过螺钉固定在u形槽5底部中线上。
7.所述的驱动单元包括非对称柔性铰链机构1和压电叠堆2;所述的非对称柔性铰链机构1由薄端驱动足1
‑
1、桥式位移放大铰链1
‑
2和厚端驱动足1
‑
3组成;所述的非对称柔性铰链机构1在薄端驱动足1
‑
1一侧通过螺钉固定在滑块3上;所述的薄端驱动足1
‑
1和厚端驱动足1
‑
3以相同形变量过盈配合的方式安装于基础单元的u形槽5中;所述的压电叠堆2预紧安装在桥式位移放大铰链1
‑
2的凹槽中。
8.本发明的另一个目的在于提供一种摩擦非对称型惯性压电直线驱动装置的控制方法,包括以下步骤:
9.a)给驱动单元的压电叠堆2施加锯齿形驱动电压,当电压缓慢上升时,压电叠堆2缓慢伸长,使桥式位移放大铰链1
‑
2中的柔性部分发生弹性变形。由于薄端驱动足1
‑
1和厚端驱动足1
‑
3安装于u形槽5时的初始预变形相同,薄端驱动足1
‑
1与u形槽5之间的接触力小于厚端驱动足1
‑
3与u形槽5之间的接触力,进而导致薄端驱动足1
‑
1能承受的最大静摩擦力小于厚端驱动足1
‑
3。随着驱动电压的增加,桥式位移放大铰链1
‑
2的弹性变形增加,薄端驱动足1
‑
1和厚端驱动足1
‑
3与u形槽5之间的摩擦力也逐步增大;在临界驱动电压时,薄端驱动足1
‑
1达到最大静摩擦力,之后随着驱动电压的进一步增加,薄端驱动足1
‑
1相对u形槽5产生相对滑动。在上述过程中,因未达到厚端驱动足1
‑
3能承受的最大静摩擦力,厚端驱动足1
‑
3保持静止不动。当驱动电压迅速下降时,压电叠堆2迅速缩短,桥式位移放大铰链1
‑
2快速弹性回复到初始状态,在此过程中产生的惯性冲击力克服了厚端驱动足1
‑
3与u形槽5之间的最大静摩擦力,使得厚端驱动足1
‑
3向沿着x轴移动一段距离;重复该过程,可实现沿x轴的连续步进运动;
10.b)调节压电叠堆2的驱动电压幅值和频率,可以实现对其运动速度的调控;
11.c)通过给压电叠堆2施加反向锯齿波驱动电压,可以实现反向运动。
12.本发明的有益效果在于:结构简单,易于加工和装配,控制方便,基于非对称摩擦和惯性冲击原理,可实现稳定、无回退、大负载、高速和理论上无限行程的连续步进运动;通过试验验证,在驱动电压120伏,驱动频率为10赫兹时,运动速度超过200微米/秒。基于本发明提出的摩擦非对称结构和方法,可对其尺寸参数进行优化和调整,设计出不同结构参数和输出性能的惯性压电直线驱动装置以满足实际需求,在精密/超精密加工、精密光学与仪器、显微操作、生物医学工程等领域具有良好的应用前景。
附图说明
13.此处所说明的附图用来提供对本发明的进一步理解,构成本申请的一部分,本发明的示意性实例及其说明用于解释本发明,并不构成对本发明的不当限定。
14.图1为本发明驱动装置的立体结构示意图;
15.图2为本发明驱动装置的俯视图;
16.图3为本发明带有压电叠堆的非对称柔性铰链机构示意图;
17.图4为本发明的非对称柔性铰链机构在压电元件位移输出作用下的变形示意图;
18.图5为本发明的正向驱动电压时序图;
19.图6为本发明的反向驱动电压时序图;
20.图7为本发明驱动装置在驱动电压幅值均为120伏,不同驱动频率下测得的实际运动输出曲线;
21.图8为本发明驱动装置在驱动频率为10赫兹,不同驱动电压幅值下的实际运动输出曲线。
22.图中:1、非对称柔性铰链机构;1
‑
1、薄端驱动足;1
‑
2、桥式位移放大铰链;1
‑
3、厚端驱动足;2、压电叠堆;3、滑块;4、导轨;5、u形槽。
具体实施方式
23.下面结合附图进一步说明本发明的详细内容及其具体实施方式。
24.参见图1、图2所示,本发明的摩擦非对称型惯性压电直线驱动装置,包括基础单元、驱动单元、滑块3;所述的驱动单元通过螺钉与滑块3连接;所述的滑块3在基础单元的导轨4上滑动;所述的驱动单元通过过盈配合的方式安装在基础单元的u形槽5内。
25.参见图1、图2所示,所述的基础单元包括导轨4和u形槽5;所述的导轨4通过螺钉固定在u形槽5底部中线上。
26.参见图1至图4所示,所述的驱动单元包括非对称柔性铰链机构1和压电叠堆2;所述的非对称柔性铰链机构1由薄端驱动足1
‑
1、桥式位移放大铰链1
‑
2和厚端驱动足1
‑
3组成;所述的非对称柔性铰链机构1在薄端驱动足1
‑
1一侧通过螺钉固定在滑块3上;所述的薄端驱动足1
‑
1和厚端驱动足1
‑
3以相同形变量过盈配合的方式安装于基础单元的u形槽5中;所述的压电叠堆2预紧安装在桥式位移放大铰链1
‑
2的凹槽中。
27.参见图1至图6所示,具体说明摩擦非对称型惯性压电直线驱动装置的控制方法,包括:
28.a)给驱动单元的压电叠堆2施加锯齿形驱动电压,当电压缓慢上升时,压电叠堆2缓慢伸长,使桥式位移放大铰链1
‑
2中的柔性部分发生弹性变形,并作用给薄端驱动足1
‑
1和厚端驱动足1
‑
3,此时,二者与u形槽5之间出现相对运动趋势。由于薄端驱动足1
‑
1和厚端驱动足1
‑
3安装于u形槽5时的初始预变形相同,薄端驱动足1
‑
1与u形槽5之间的接触力小于厚端驱动足1
‑
3与u形槽5之间的接触力,进而导致薄端驱动足1
‑
1能承受的最大静摩擦力小于厚端驱动足1
‑
3。随着驱动电压的增加,桥式位移放大铰链1
‑
2的弹性变形增加,薄端驱动足1
‑
1和厚端驱动足1
‑
3与u形槽5之间的摩擦力也逐步增大;在临界驱动电压时,薄端驱动足1
‑
1达到最大静摩擦力,之后随着驱动电压的进一步增加,薄端驱动足1
‑
1相对u形槽5产生相对滑动,沿x轴移动最大单步位移δs0。在上述过程中,因未达到厚端驱动足1
‑
3能承受的最大静摩擦力,厚端驱动足1
‑
3保持静止不动。当驱动电压迅速下降时,压电叠堆2迅速缩短,桥式位移放大铰链1
‑
2快速弹性回复到初始状态。压电叠堆2的迅速收缩产生惯性冲击力,同时作用于薄端驱动足1
‑
1和厚端驱动足1
‑
3上,克服了厚端驱动足1
‑
3与u形槽5之间的最大静摩擦力,使得厚端驱动足1
‑
3向沿着x轴移动一段距离,与此同时薄端驱动足1
‑
1也产生了较小的滑动位移l0;重复该过程,可实现沿x轴的连续步进运动;
29.b)调节压电叠堆2的驱动电压幅值和频率,可以实现对其运动速度的调控;
30.c)通过给压电叠堆2施加反向锯齿波驱动电压,可以实现反向运动。
31.参见图7所示,是本发明在驱动电压幅值均为120伏,不同驱动电压频率下测得的实际运动输出曲线。附图8是本发明在驱动频率为10赫兹,不同驱动电压幅值下测得的实际运动输出曲线。在驱动电压120伏,频率为10赫兹时,驱动速度超过200微米/秒
32.以上所述仅为本发明的优选实例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡对本发明所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1