一种永磁电机滑台的制作方法
1.本发明涉及机械制造领域,特别涉及一种永磁电机滑台。
背景技术:
2.在滑台上安装待运载物件,通过滑台的滑动实现待运载物件的转移;目前丝杠滑台对长行程存在限制,并且不能实现快速运动,同时丝杠滑台还存在精度不高的问题。除此以外,行业内的滑台还存在起动推力易受到电压波动的影响、运行速度范围受到电机极距限制的问题。
3.亟需一种进给速度范围宽、速度特性好、加速度大、定位精度高、行程不受限制、结构简单、运动平稳、安全可靠的永磁电机滑台来解决上述技术问题。
技术实现要素:
4.为了解决上述问题,本发明提供了一种永磁电机滑台,本发明的永磁电机滑台进给速度范围宽、速度特性好、加速度大、定位精度高、行程不受限制、结构简单、运动平稳、安全可靠,使用寿命长。
5.本发明是通过如下技术方案解决上述技术问题的:
6.本发明提供了一种永磁电机滑台,包括底座、定子、动子、导轨、滑块、滑座、拖链件、拖链板、拖链、光栅尺、光栅读数头、光栅块、防撞块、传感器、端板、盖板、盖板块和感应片;所述定子安装于所述底座上;所述导轨固定于所述底座的两个侧边,所述滑块固定于所述动子的两端,滑块滑动固定于所述导轨上,所述动子悬设于所述定子的上方;所述滑座安装于所述滑块的上方;所述拖链板固定于所述底座上,所述拖链设置于所述拖链板上,所述拖链和所述拖链件相连,所述拖链件固定连接于所述滑座;所述端板安装于所述底座的两端,所述防撞块固定于所述端板上;所述盖板块与所述盖板固定,所述盖板设置于所述底座的上方;所述光栅尺固定于所述底座上,所述光栅块固定于所述滑座上,所述光栅读数头连接于所述光栅块上;所述感应片安装于所述滑座上,所述传感器固定于所述拖链板的末端。
7.本发明中,所述底座用于承载所述永磁电机滑台的其他部件;
8.较佳地,所述底座的长度为5~40米。
9.本发明中,所述定子和所述动子用于提供运动的动力。
10.本发明中,所述导轨用于提供运动导向。
11.本发明中,所述滑块用于实现滑台的滑动。
12.本发明中,所述滑座用于安装其他运载物体。
13.本发明中,所述拖链板、拖链和拖链件用于方便动子的电线随着滑座运动。
14.本发明中,所述光栅尺、光栅读数头、光栅块和感应片用于实现运动位置的反馈和定位;
15.较佳地,所述光栅块通过螺钉固定于所述滑座上。
16.本发明中,所述防撞块用于防止滑座撞碰到端板;
17.较佳地,所述防撞块上设置有橡胶垫片。
18.本发明中,所述传感器用于防止滑座超越极限位置。
19.本发明中,所述端板用于形成底座两端的封闭;
20.较佳地,所述端板和所述底座通过螺钉固定连接。
21.本发明中,所述盖板和盖板块用于防止别的物体掉落到滑台的内部;
22.较佳地,所述盖板和所述盖板块通过螺钉固定。
23.本发明的永磁电机滑台的工作原理为:动子通电,动子和定子产生推力,带动滑座运动,滑座上的光栅读数头通电,读取光栅尺上的位置信息,这样就能知道滑座运动的实际位置。
24.本发明的积极进步效果:本发明的永磁电机滑台进给速度范围宽、速度特性好、加速度大、定位精度高、行程不受限制、结构简单、运动平稳、安全可靠,使用寿命长。
附图说明
25.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
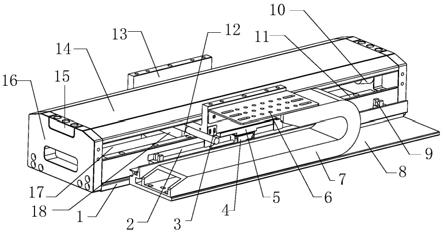
26.图1为本发明实施例的永磁电机滑台的结构示意图。
27.附图标记说明:
28.1、底座;
ꢀꢀꢀꢀꢀꢀ
2、光栅尺;
29.3、感应片;
ꢀꢀꢀꢀ
4、光栅读数头;
30.5、光栅块;
ꢀꢀꢀꢀ
6、拖链件;
31.7、拖链;
ꢀꢀꢀꢀꢀꢀ
8、拖链板;
32.9、传感器;
ꢀꢀꢀꢀ
10、防撞块;
33.11、导轨;
ꢀꢀꢀꢀꢀ
12、滑块;
34.13、滑座;
ꢀꢀꢀꢀꢀ
14、盖板;
35.15、盖板块;
ꢀꢀꢀ
16、端板;
36.17、定子;
ꢀꢀꢀꢀꢀ
18、动子。
具体实施方式
37.下面结合附图和实施例,对本发明的具体实施方式作进一步描述。以下实施例仅用于更加清楚地说明本发明的技术方案,而不能以此来限制本发明的保护范围。
38.如图1所示,本实施例提供了一种永磁电机滑台,包括底座1、定子17、动子18、导轨11、滑块12、滑座13、拖链件6、拖链板8、拖链7、光栅尺2、光栅读数头4、光栅块5、防撞块10、传感器9、端板16、盖板14、盖板块15和感应片3;定子17安装于底座1上;导轨11固定于底座1的两个侧边,滑块12固定于动子18的两端,滑块12滑动固定于导轨11上,动子18悬设于定子17的上方;滑座13安装于滑块12的上方;拖链板8固定于底座1上,拖链7设置于拖链板8上,拖链7和拖链件6相连,拖链件6固定连接于滑座13;端板16安装于底座1的两端,防撞块10固定于端板16上;盖板块15与盖板14固定,盖板14设置于底座1的上方;光栅尺2固定于底座1
上,光栅块5固定于滑座13上,光栅读数头4连接于光栅块5上;感应片3安装于滑座13上,传感器9固定于拖链板8的末端。
39.本实施例中,底座1用于承载永磁电机滑台的其他部件;底座1的长度为20米。
40.本实施例中,定子17和动子18用于提供运动的动力。
41.本实施例中,导轨11用于提供运动导向。
42.本实施例中,滑块12用于实现滑台的滑动。
43.本实施例中,滑座13用于安装其他运载物体。
44.本实施例中,拖链板8、拖链7和拖链件6用于方便动子18的电线随着滑座13运动。
45.本实施例中,光栅尺2、光栅读数头4、光栅块5和感应片3用于实现运动位置的反馈和定位;光栅块5通过螺钉固定于滑座13上。
46.本实施例中,防撞块10用于防止滑座13撞碰到端板16;防撞块10上设置有橡胶垫片。
47.本实施例中,传感器9用于防止滑座13超越极限位置。
48.本实施例中,端板16用于形成底座1两端的封闭;端板16和底座1通过螺钉固定连接。
49.本实施例中,盖板14和盖板块15用于防止别的物体掉落到滑台的内部;盖板14和盖板块15通过螺钉固定。
50.本实施例的永磁电机滑台的工作原理为:动子通电,动子和定子产生推力,带动滑座运动,滑座上的光栅读数头通电,读取光栅尺上的位置信息,这样就能知道滑座运动的实际位置。
51.本实施例的永磁电机滑台进给速度范围宽、速度特性好、加速度大、定位精度高、行程不受限制、结构简单、运动平稳、安全可靠,使用寿命长,具体体现在:
52.1、进给速度范围宽:可从1m/s到20m/min以上,加工中心的快进速度已达208m/min,而传统机床快进速度<60m/min,一般为20~30m/min。
53.2、速度特性好:速度偏差可达0.01%以下。
54.3、加速度大:直线电机最大加速度可达30g,加工中心的进给加速度已达3.24g,激光加工机的进给加速度已达5g,而传统机s床进给加速度在1g以下,一般为0.3g。
55.4、定位精度高:采用光栅闭环控制,定位精度可达0.1~0.01mm。应用前馈控制的直线电机驱动系统可减少跟踪误差200倍以上。由于运动部件的动态特性好,响应灵敏,加上插补控制的精细化,可实现纳米级控制。
56.5、行程不受限制:传统的丝杠传动受丝杠制造工艺限制,一般4~6m,更长的行程需要接长丝杠,无论从制造工艺还是在性能上都不理想。而采用直线电机驱动,定子可无限加长,且制造工艺简单,已有大型高速加工中心x轴长达40m以上。
57.6、结构简单、运动平稳、噪声小,运动部件摩擦小、磨损小、使用寿命长、安全可靠。
58.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1