电路基板、马达驱动用电子控制装置和转向致动器系统的制作方法
1.本发明涉及马达驱动用电子控制装置的电路基板、马达驱动用电子控制装置和转向致动器系统。
背景技术:
2.在车载的电子控制装置中,需要采取emc(electro-magnetic compatibility:电磁兼容性)措施和esd(electro-static discharge:静电释放)措施,在自动驾驶车辆的情况下,需要采取更为严格的emc措施和esd措施,其中,emc措施的效果可通过放射试验进行测试评价,esd措施的效果可通过静电抗扰度试验进行测试评价。
3.在emc措施不充分的情况下,从电子控制装置泄漏的放射噪声可能会使装设于车辆的其它电子控制装置误动作,并且,在放射噪声被车辆的天线接收时,会干扰电波的频率,从而能从扬声器听到杂音。另一方面,在esd措施不充分的情况下,所施加的静电可能会破坏电子控制装置内部的电子器件等,导致电子控制装置发生故障。
4.以往,作为emc措施,在专利文献1中公开了以下的技术:在电动助力转向装置中,在三相电桥型的马达驱动电路的各fet(field effect transistor:场效应晶体管)上并联连接缓冲电路,以减小开关噪声。并且,作为esd措施,在专利文献2中公开了以下的技术:在螺线管驱动装置中,在从驱动电路朝向螺线管的输出线与接地之间设置电容器,利用该电容器进行保护,避免受到静电释放的影响。
5.专利文献1:日本特开2009-274489号公报
6.专利文献2:日本特开2019-132633号公报
7.不过,在现有技术中没有公开能同时满足电磁兼容性要求和静电释放要求的技术措施。
技术实现要素:
8.本发明正是鉴于上述问题而完成的,目的在于提供一种电路基板、马达驱动用电子控制装置和转向致动器系统,能同时满足电磁兼容性要求和静电释放要求。
9.为了实现上述目的,本发明提供一种马达驱动用电子控制装置的电路基板,其包括:输出线,该输出线用于将马达驱动电路与马达电连接;接地部;以及rc缓冲电路(rc snubber circuit),该rc缓冲电路包括电阻和电容器,且设置在所述输出线与所述接地部之间。
10.根据本发明,通过在输出线与接地部之间设置包括电阻和电容的rc缓冲电路,能同时满足电磁兼容性要求和静电释放要求,因此,能提供具有低噪声辐射性能和高抗静电性能的电路基板。
11.此外,在本发明的电路基板中,优选所述输出线由供马达电流流动的基板图案构成,所述接地部由接地图案构成,所述基板图案与所述接地图案靠近配置,所述基板图案与所述电阻靠近配置,所述电阻与所述电容器靠近配置,所述电容器与所述接地图案靠近配
置。
12.根据本发明,通过尽量缩短各部分与接地部之间的距离,能进一步降低噪声辐射并提高抗静电能力。
13.此外,在本发明的电路基板中,优选在所述基板图案上,在比所述基板图案与所述rc缓冲电路的连接点靠所述马达驱动电路的一侧设置有作为开关元件的断相继电器。
14.根据本发明,通过在基板图案上在比基板图案与rc缓冲电路的连接点靠马达驱动电路的一侧设置作为开关元件的断相继电器,在产生异常电流时,断相继电器作为安全机构能切断马达电流。
15.此外,在本发明的电路基板中,优选所述断相继电器是金属-氧化物半导体场效应管(mos-fet)。
16.根据本发明,通过在金属-氧化物半导体场效应管与接地部之间rc缓冲电路,即使在断相继电器断开的状态下对输出线施加静电,也能防止断相继电器的故障。
17.此外,在本发明的电路基板中,优选所述输出线包括三相马达的三相供电线,在所述三相供电线与所述接地部之间分别设置有所述rc缓冲电路。
18.根据本发明,在三相马达的三相供电线与接地部之间分别设置有rc缓冲电路,因此,能进一步降低噪声辐射并提高抗静电能力。
19.此外,在本发明的电路基板中,优选所述马达驱动电路用于驱动多个所述三相马达,在多个所述三相马达的三相供电线与所述接地部之间分别设置有所述rc缓冲电路。
20.根据本发明,在多个三相马达的三相供电线与接地部之间分别设置有rc缓冲电路,因此,能进一步降低噪声辐射并提高抗静电能力,这对于自动驾驶而言特别有用。也就是说,在自动驾驶中进行自动转向时,从安全方面考虑,需要设置冗余的驱动电路,通过针对每个系统的三相马达设置rc缓冲电路,能有效提高安全性。
21.此外,为了实现上述目的,本发明提供一种马达驱动用电子控制装置,其包括上述任一项的电路基板。
22.根据本发明,能提供具有低噪声辐射性能和高抗静电性能的高品质的马达驱动用电子控制装置。
23.此外,为了实现上述目的,本发明提供一种转向致动器系统,其包括上述的马达驱动用电子控制装置。
24.根据本发明,能提供具有低噪声辐射性能和高抗静电性能的高品质的转向致动器系统。
25.(发明效果)
26.根据本发明,通过在输出线与接地部之间设置包括电阻和电容的rc缓冲电路,能同时满足电磁兼容性要求和静电释放要求,因此,能提供具有低噪声辐射性能和高抗静电性能的电路基板。
附图说明
27.图1是表示本发明实施方式的转向致动器系统的整体结构的示意图。
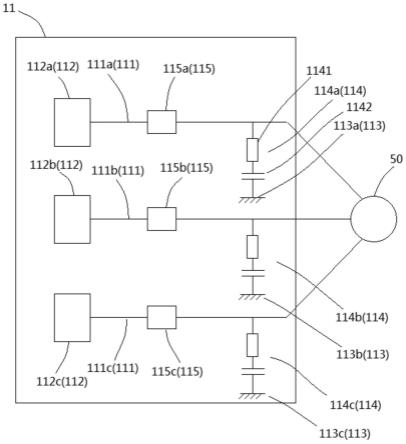
28.图2是表示图1所示的转向致动器系统中的马达驱动用电子控制装置的电路基板及与其电连接的马达的示意图,其中省略了部分结构。
29.图3是表示图2所示的电路基板上的部件的布置的局部示意图。
30.图4a是表示对未设置rc缓冲电路的比较例进行静电抗扰度试验得到的结果的图表,图4b是表示对本发明进行静电抗扰度试验得到的结果的图表。
31.图5a是表示基于电场天线法对未设置rc缓冲电路的比较例进行试验得到的在低频带内的结果的图表(表示辐射噪声,x方向为水平方向),图5b是表示基于电场天线法对本发明进行试验得到的在低频带区间内的结果的图表(表示辐射噪声,x方向为水平方向)。
32.图6a是表示基于电场天线法对未设置rc缓冲电路的比较例进行试验得到的在高频带内的结果的图表(表示辐射噪声,x方向为水平方向),图6b是表示基于电场天线法对本发明进行试验得到的在高频带内的结果的图表(表示辐射噪声,x方向为水平方向)。
33.图7a是表示基于电流探针法对未设置rc缓冲电路的比较例进行试验得到的结果的图表(表示传导噪声),图7b是表示基于电流探针法针对本发明进行试验得到的结果的图表(表示传导噪声)。
34.(符号说明)
[0035]1ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
转向致动器系统
[0036]
10
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
马达驱动用电子控制装置
[0037]
11
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
电路基板
[0038]
111
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
输出线
[0039]
111a
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第一供电线
[0040]
111b
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二供电线
[0041]
111c
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第三供电线
[0042]
111a
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
长条形主体
[0043]
111b
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
突出部
[0044]
112
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
马达驱动电路
[0045]
112a
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第一马达驱动电路
[0046]
112b
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二马达驱动电路
[0047]
112c
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第三马达驱动电路
[0048]
113
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
接地部
[0049]
113a
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第一接地部
[0050]
113b
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二接地部
[0051]
113c
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第三接地部
[0052]
113a
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
缺口部
[0053]
114
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
rc缓冲电路
[0054]
114a
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第一rc缓冲电路
[0055]
114b
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二rc缓冲电路
[0056]
114c
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第三rc缓冲电路
[0057]
1141
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
电阻
[0058]
1142
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
电容器
[0059]
1143
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
中继图案
[0060]
115
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
断相继电器
[0061]
115a
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第一断相继电器
[0062]
115b
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二断相继电器
[0063]
115c
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第三断相继电器
[0064]
20
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
电池
[0065]
30
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
方向盘
[0066]
40
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
旋转轴
[0067]
50
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
马达
[0068]
60
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
小齿轮
[0069]
70
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
齿条轴
[0070]
81
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
阀
[0071]
82
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
缸
[0072]
90
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
车轮
具体实施方式
[0073]
下面,结合图1至图7b对本发明实施方式的转向致动器系统进行说明。
[0074]
(转向致动器系统的整体结构)
[0075]
图1是表示本发明实施方式的转向致动器系统的整体结构的示意图。
[0076]
转向致动器系统1例如在大型车辆等输送设备中辅助驾驶员的方向盘操作。
[0077]
如图1所示,转向致动器系统1包括马达驱动用电子控制装置10、电池20、方向盘30、旋转轴40、马达50、小齿轮60、齿条轴70、阀81、缸82和车轮90。
[0078]
此外,电池20构成电源供给部,方向盘30是转向部件,旋转轴40的一端与方向盘30连接,在旋转轴40上同轴地设置有马达50,小齿轮60与旋转轴40的另一端连接,齿条轴70与小齿轮60啮合,且与车轮90连接,通过小齿轮60与齿条轴70的配合,旋转轴40的旋转运动被转换成直线运动,从而带动车轮90转向,阀81和缸82例如通过液压对齿条轴70进行辅助驱动,从而辅助车轮90转向。
[0079]
此外,马达驱动用电子控制装置10例如根据设置于马达50的角度传感器获得的马达50的旋转角度生成马达驱动信号,并将该信号输出至马达50,从而进行自动转向控制。
[0080]
此外,马达驱动用电子控制装置10例如还根据对方向盘30的转向转矩进行检测的转矩传感器来检测驾驶员是否对方向盘30进行操作,在检测出上述操作时,例如自动转向控制,切换成手动控制。
[0081]
此处,由于电池20、方向盘30、旋转轴40、马达50、小齿轮60、齿条轴70、阀81、缸82等不是本发明的重点,可采用常规结构,因而不再详细展开。
[0082]
(马达驱动用电子控制装置的电路基板)
[0083]
图2是表示图1所示的转向致动器系统中的马达驱动用电子控制装置的电路基板及与其电连接的马达的示意图,其中省略了部分结构,图3是表示图2所示的电路基板上的部件的布置的局部示意图。
[0084]
如图2所示,马达驱动用电子控制装置10包括电路基板11,该电路基板11包括:输出线111,该输出线111用于将马达驱动电路112与马达50电连接;接地部113;以及rc缓冲电路114,该rc缓冲电路114包括电阻1141和电容器1142,且设置在输出线111与接地部113之
间。
[0085]
此外,如图2所示,在输出线111上,在比输出线111与rc缓冲电路114的连接点靠马达驱动电路112的一侧设置有作为开关元件的断相继电器115。
[0086]
此处,如图2所示,马达50是三相马达,输出线111包括与马达50的三相分别对应的第一供电线111a、第二供电线111b和第三供电线111c,接地部113包括与第一供电线111a、第二供电线111b和第三供电线111c分别对应的第一接地部113a、第二接地部113b和第三接地部113c,断相继电器115包括与第一供电线111a、第二供电线111b和第三供电线111c分别对应的第一断相继电器115a、第二断相继电器115b和第三断相继电器115c。并且,马达驱动电路112包括与马达50的三相分别对应的第一马达驱动电路112a、第二马达驱动电路112b、第三马达驱动电路112c。并且,在第一供电线111a、第二供电线111b和第三供电线111c与第一接地部113a、第二接地部113b和第三接地部113c之间分别设置有第一rc缓冲电路114a、第二rc缓冲电路114b和第三rc缓冲电路114c,在第一供电线111a、第二供电线111b和第三供电线111c上,在比第一供电线111a与第一rc缓冲电路114a的连接点、第二供电线111b与第二rc缓冲电路114b的连接点以及第三供电线111c与第三rc缓冲电路114c的连接点靠第一马达驱动电路112a、第二马达驱动电路112b、第三马达驱动电路112c的一侧分别设置有第一断相继电器115a、第二断相继电器115b和第三断相继电器115c。
[0087]
此外,马达驱动电路112例如由金属-氧化物半导体场效应管(mos-fet)或绝缘栅双极型晶体管(igbt)构成,断相继电器115例如是金属-氧化物半导体场效应管(mos-fet)。
[0088]
此外,如图3所示,输出线111(具体是第一供电线111a、第二供电线111b和第三供电线111c)由供马达50的电流流动的基板图案构成,接地部113(具体是第一接地部113a、第二接地部113b和第三接地部113c)由接地图案构成。并且,构成输出线111的基板图案与构成接地部113的接地图案靠近配置,构成输出线111的基板图案与电阻1141靠近配置,电阻1141与电容器1142靠近配置,电容器1142与构成接地部113的接地图案靠近配置。
[0089]
此外,如图3所示,构成输出线111的基板图案具有长条形主体111a和从该长条形主体111a突出的突出部111b,构成接地部113的接地图案(经由图案上的通孔通向基板内层的接地铜箔图案(gnd plane))呈一个角部具有缺口部113a的矩形,构成接地部113的接地图案的缺口部113a与构成输出线111的基板图案的长条形主体111a及突出部111b一起围成的空间内设置有中继图案1143,电阻1141跨接在构成输出线111的基板图案和中继图案(芯片)1143之间,电容器1142跨接在构成接地部113的接地图案和中继图案1143之间。并且,构成输出线111的基板图案、中继图案1143和构成接地部113的接地图案之间的距离例如为5mm以下,优选为3mm以下。
[0090]
(本实施方式的主要效果)
[0091]
根据本实施方式的转向致动器系统1,通过在输出线111与接地部113之间设置包括电阻1141和电容1142的rc缓冲电路114,如图4a~图7b所示,能有效降低噪声辐射并提高抗静电能力,能同时满足电磁兼容性要求和静电释放要求,因此,能提供具有低噪声辐射性能和高抗静电性能的电路基板11。
[0092]
此外,根据本实施方式的转向致动器系统1,构成输出线111的基板图案与构成接地部113的接地图案靠近配置,构成输出线111的基板图案与电阻1141靠近配置,电阻1141与电容器1142靠近配置,电容器1142与构成接地部113的接地图案靠近配置,因此,能进一
步降低噪声辐射并提高抗静电能力。
[0093]
上面结合附图对本发明进行了示例性描述,显然本发明的具体实现并不受上述实施方式的限制。
[0094]
例如,在上述实施方式中,在第一供电线111a、第二供电线111b和第三供电线111c与第一接地部113a、第二接地部113b和第三接地部113c之间分别设置有第一rc缓冲电路114a、第二rc缓冲电路114b和第三rc缓冲电路114c,但并不局限于此,也可仅设置第一rc缓冲电路114a、第二rc缓冲电路114b和第三rc缓冲电路114c中的一个或两个。
[0095]
此外,在上述实施方式中,在第一供电线111a、第二供电线111b和第三供电线111c上,在比第一供电线111a与第一rc缓冲电路114a的连接点、第二供电线111b与第二rc缓冲电路114b的连接点以及第三供电线111c与第三rc缓冲电路114c的连接点靠第一马达驱动电路112a、第二马达驱动电路112b、第三马达驱动电路112c的一侧分别设置有第一断相继电器115a、第二断相继电器115b和第三断相继电器115c,但并不局限于此,也可仅设置第一断相继电器115a、第二断相继电器115b和第三断相继电器115c中的一个或两个,根据情况,也可省略第一断相继电器115a、第二断相继电器115b和第三断相继电器115c。
[0096]
此外,在上述实施方式中,构成输出线111的基板图案、构成接地部113的接地图案、电阻1141和电容器1142不局限于图3所示的布置,构成输出线111的基板图案、构成接地部113的接地图案也不局限于粗通3所示的形状。
[0097]
此外,在上述实施方式中,马达驱动电路112也可用于驱动多个(例如两个)马达50(多个系统的马达50),在多个马达50的三相供电线与接地部113之间分别设置rc缓冲电路114。
[0098]
在包括多个马达的情况下,与包括一个马达的三相马达驱动电路相比,马达驱动电路(逆变器电路)的开关噪声成为多倍,因此,通过针对各马达设置rc缓冲电路114,能更有效地抑制噪声辐射。
[0099]
此外,在上述实施方式中,也可与背景技术中提及的专利文献1中的缓冲电路并用。
[0100]
应当理解,本发明在其范围内,能将实施方式中的各个部分自由组合,或是将实施方式中的各个部分适当变形、省略。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1