一种新型具有动态误差补偿的永磁同步电机位置观测方法与流程
1.本发明涉及同步电机位置自感知的观测技术领域,特别是涉及一种新型具有动态误差补偿的永磁同步电机位置观测方法。
背景技术:
2.永磁同步电机具有结构简单、体积小、损耗低、效率高等优点。它被广泛应用于工业生产、国防、日常生活等领域。在永磁同步电机的控制系统中,在电机轴上安装速度传感器或位置传感器是必不可少的,它带来了以下问题:(1)传感器受温度、湿度、检测距离、振动等工作条件的影响,特别是在一些传感器检测精度较高的应用场合,限制了pmsm调速系统在这些特殊领域的应用;(2)传感器增大了电机的尺寸,增大了控制系统的惯量;(3)为了保证检测精度,传感器的安装和维护需要在较高的水平上进行,这增加了驱动系统的复杂性,降低了系统的可靠性,增加了成本。因此,永磁同步电机的无传感控制在电机控制领域中具有重要的作用,特别是在国防等现代机电控制系统中。无传感矢量控制和无传感直接转矩控制已经进行了大量的研究,尤其是后者。近年来,直接转矩控制以其快速的动态转矩响应和结构简单的特点引起了研究人员的广泛关注。它已应用于运载火箭的“旋翼6004”推力矢量控制致动器和美国国家航空航天公司研制的航空器飞行面控制致动器以及abb公司开发的“azipod”电吊舱推进系统。
3.由于无传感直接转矩控制的关键技术,是通过电流位置模型精确估计定子磁链和转矩,因此转子位置观测器必须具有良好的动态和稳态观测精度。一些转子位置和转速的估计方法已经被提出,如定子磁链估计方法、模型参考自适应方法、状态观测方法、高频注入方法、人工智能估计方法等。总的来说,它们可以分为两类:基于电机数学模型的方法和基于外部激励的方法。前者可以通过观察电机的反电动势来判断转子位置,广泛应用于非凸极永磁同步电动机的中高速无传感控制。然而,凸极永磁同步电动机的转子位置估计,如内嵌式永磁同步电动机,由于凸极效应的存在,比无凸极效应的永磁同步电动机的转子位置估计更为复杂。为了实现基于电机模型的ipmsm转子位置估计,通常将模型重构转化为等效的隐极永磁同步电动机模型(无凸极效应)。在以往的文献中,重构模型分为扩展反电动势模型、磁链模型和等效电动势模型。eemf模型受转子转速和定子电阻、定子电感等电机参数以及q轴定子电流变化率的影响。因此,设计这种对负载扰动和电机参数不确定性具有鲁棒性的观测器是困难的。
4.在有源磁链模型中,一般采用积分器计算定子磁链,这导致了一些实际和困难的问题,如电流传感器的稳态偏置、累积误差和积分器的初始状态。相比之下,eemf模型和af模型,等效emf模型与转子转速无关,对电机参数的不确定性不敏感,不受积分器误差的影响。然而,在推导过程中忽略了d轴定子电流的微分项。因此,当电机在转速、负载瞬态或存在电流谐波运行时,基于等效电动势模型的转子位置观测器的动态精度将会降低。直接转矩控制具有快速的动态转矩响应,导致d轴定子电流差分较大,但较大的定子磁链畸变和转矩脉动导致定子电流次谐波较大。因此,直接转矩控制在负载和转速瞬态或稳态转速运行
时,d轴定子电流差动引起的位置观测误差较大。
5.为了通过无传感直接转矩控制,实现高速调速系统的高性能,提出了一种基于等效电动势模型的动态误差补偿转子位置观测器。建立滑模观测器来估计等效电动势,从而提取转子位置。利用动态误差补偿器抑制定子电流在直轴方向变化引起的转子位置估计误差,提高内嵌式永磁同步电动机直接转矩控制系统的位置估计性能。
技术实现要素:
6.本发明的目的在于利用动态误差补偿器抑制定子电流在直轴方向变化引起的转子位置估计误差,提高内嵌式永磁同步电动机直接转矩控制系统的位置估计性能而提出的一种新型具有动态误差补偿的永磁同步电机位置观测方法。
7.为了实现上述目的,本发明采用了如下技术方案:
8.一种新型具有动态误差补偿的永磁同步电机位置观测方法,包括以下步骤:
9.s1、在α
‑
β静止参考系中,基于等效emf模型,建立内嵌式永磁同步电动机(ipmsm)定子电压和电流模型,具体为:
[0010][0011]
式中,是等效emfs,u
α
,u
β
是定子电压;i
α
,i
β
是定子电流在α
‑
β静止参考系;r
s
是定子电阻;l
q
是q
‑
axis电感;
[0012]
s2、忽略d
‑
轴定子电流的动态特性,则从而可将s1中提到的公式(1)简化为
[0013][0014]
根据公式(2),等效emf模型的α和β分量分别为转子位置θ
′
r
的正弦和余弦函数,其中θ
′
r
可以从正切函数tan
‑1中提取;
[0015]
s3、为了增强鲁棒性,建立基于等效emf模型的滑模观测器的状态空间方程,具体为:
[0016][0017]
式中,观察定子电流在α
‑
β坐标系中;l是滑膜增益;sign 是开关函数;
[0018]
s4、由公式(1)减去公式(3),得到等效emf模型的当前误差状态空间方程,具体为:
[0019][0020]
式中,
[0021]
s5、定义lyapunov候选函数为:
[0022][0023]
对公式(5)进行求导,计算得出状态变量的全局渐近稳定性,具体公式为:
[0024][0025]
计算得出,滑模增益的范围为
[0026]
s6、当系统轨迹到达滑动面时,观测电流收敛到实际电流。然后通过低通滤波器从滑模高频开关信号中提取等效电动势,即等效控制函数,转子位置可以得到:
[0027][0028]
s7、提高转子位置观测的动态精度,补偿简化模型观察到的转子位置θ
r
′
与实际位置θ
r
之间将存在动态误差角对等效emf模型公式进行转化。
[0029]
s8、θ
r
′
是θ
r
与之间的差值,可以通过滑膜观测器得到,ω
r
是θ
r
的导数,也是θ
r
的函数,使用park变换对s7中所得的公式进行处理,将i
d
转换成θ
r
的函数;
[0030]
s9、当θ
r
和θ
r
′
之间有误差时,实际观测值θ
r
′
可以通过pi调节器自动追踪,利用的变化特性,对调节器的参数进行调整,以达到最好的跟踪效果。
[0031]
优选地,所述s1中提到的等效emf模型为:
[0032][0033]
式中,p是导数算子;是d
‑
轴定子电流;是转子电气角度;l
d
是 d
‑
轴的电感;ω
r
是动子电角速度;ψ
f
是永磁磁通
[0034]
优选地,所述s7中提到的转化后的等效emf模型公式为:
[0035][0036]
式中,是等效电动势的振幅。
[0037]
优选地,根据所述s8中所述方法对步骤(9)进行处理,转化后的公式为:
[0038][0039]
式中,
[0040]
与现有技术相比,本发明提供了一种新型具有动态误差补偿的永磁同步电机位置观测方法,具备以下有益效果:
[0041]
本文提出的一种新型具有动态误差补偿的永磁同步电机位置观测方法,利用滑模观测器来估计等效电动势,提取转子位置;采用动态误差补偿器抑制定子在直轴(d轴)电流变化引起的转子位置估计误差,提高凸极永磁同步电机无传感直接转矩控制系统的位置估计性能;与现有设计相比,本发明的优点在于:
[0042]
(1)对于快速转矩响应,转速和负载瞬态状态下的位置观测精度分别提高了54.16%和54.55%;
[0043]
(2)对于高谐波电流的直接转矩控制,通过减小电流谐波引起的观测误差,使转速稳定状态下的位置观测精度提高了44.89%。
[0044]
综上所述,本发明有效提高了ipmsm永磁同步电动机直接转矩控制系统的位置自感知性能。
附图说明
[0045]
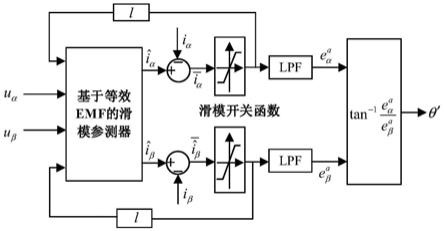
图1为本发明提出的一种新型具有动态误差补偿的永磁同步电机位置观测方法的改进的滑模观测器控制原理示意图;
[0046]
图2为本发明提出的基于物联网的一种新型具有动态误差补偿的永磁同步电机位置观测方法的动态误差角补偿器示意图。
具体实施方式
[0047]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
[0048]
实施例1:
[0049]
请参阅图1
‑
2,一种新型具有动态误差补偿的永磁同步电机位置观测方法,包括以
下步骤:
[0050]
s1、在α
‑
β静止参考系中,基于等效emf模型,建立内嵌式永磁同步电动机(ipmsm)定子电压和电流模型,具体为:
[0051][0052]
式中,是等效emfs,u
α
,u
β
是定子电压;i
α
,i
β
是定子电流在α
‑
β静止参考系;r
s
是定子电阻;l
q
是q
‑
axis电感;
[0053]
s2、忽略d
‑
轴定子电流的动态特性,则从而可将s1中提到的公式(1)简化为
[0054][0055]
根据公式(2),等效emf模型的α和β分量分别为转子位置θ
r
'的正弦和余弦函数,其中θ
′
r
可以从正切函数tan
‑1中提取;
[0056]
s3、为了增强鲁棒性,建立基于等效emf模型的滑模观测器的状态空间方程,具体为:
[0057][0058]
式中,观察定子电流在α
‑
β坐标系中;l是滑膜增益;sign 是开关函数;
[0059]
s4、由公式(1)减去公式(3),得到等效emf模型的当前误差状态空间方程,具体为:
[0060][0061]
式中,
[0062]
s5、定义lyapunov候选函数为:
[0063][0064]
对公式(5)进行求导,计算得出状态变量的全局渐近稳定性,具体公式为:
[0065][0066]
计算得出,滑模增益的范围为为避免较大的滑模增益引起的抖振,应根据实际效果选择适当的l;
[0067]
s6、当系统轨迹到达滑动面时,观测电流收敛到实际电流。然后通过低通滤波器从滑模高频开关信号中提取等效电动势,即等效控制函数,转子位置可以得到:
[0068][0069]
s7、提高转子位置观测的动态精度,补偿简化模型观察到的转子位置θ
r
′
与实际位置θ
r
之间将存在动态误差角对等效emf模型公式进行转化。
[0070]
s8、θ
r
′
是θ
r
与之间的差值,可以通过滑膜观测器得到,ω
r
是θ
r
的导数,也是θ
r
的函数,使用park变换对s7中所得的公式进行处理,将i
d
转换成θ
r
的函数;
[0071]
s9、当θ
r
和θ
r
′
之间有误差时,实际观测值θ
r
′
可以通过pi调节器自动追踪,利用的变化特性,对调节器的参数进行调整,以达到最好的跟踪效果。
[0072]
所述s1中提到的等效emf模型为:
[0073][0074]
式中,p是导数算子;是d
‑
轴定子电流;是转子电气角度;l
d
是d
‑
轴的电感;ω
r
是动子电角速度;ψ
f
是永磁磁通
[0075]
如公式(8)所示,相关项sinθ
r
和cosθ
r
是包含在和的表达式,利用方程(8)计算转子位置非常复杂;如果p(i
d
)是0或者 (l
d
‑
l
q
)p(i
d
)<<ω
r
((l
d
‑
l
q
)i
d
+ψ
f
),可以忽略i
d
的微分,大大简化了计算;所述s7中提到的转化后的等效emf模型公式为:
[0076][0077]
式中,是等效电动势的振幅。
[0078]
如公式(9)所示,动态误差角是用简化模型观察到的转子位置θ
r
′
与实际位置θ
r
之间的误差;如果i
d
的微分可以忽略,那么值几乎为零;在一些特定的情况下,例如,当使用i
d*
=0的矢量控制,假设可以成立;然而,在实际应用中,这种假设是有限的,特别是在矢量控制中使用最大转矩(mtpa)策略或直接转矩控制;当ipmsm在转速、负载瞬态或大电流谐
波工作时,i
d
变化率大,动态误差角不完全等于零。较低的速度和更大的负荷会产生更大的动态误差角针对转子位置估计不准确的问题,提出了一种动态误差角补偿器;它减小了转子位置观测值与实际值之间的误差,提高了转子位置在转速、负载瞬态变化以及电流谐波情况下的性能估计;再根据所述s8中所述方法对步骤(9)进行处理,转化后的公式为:
[0079][0080]
式中,
[0081]
本文提出的一种新型具有动态误差补偿的永磁同步电机位置观测方法,利用滑模观测器来估计等效电动势,提取转子位置;采用动态误差补偿器抑制定子在直轴(d轴)电流变化引起的转子位置估计误差,提高凸极永磁同步电机无传感直接转矩控制系统的位置估计性能;与现有设计相比,本发明的优点在于:
[0082]
(1)对于快速转矩响应,转速和负载瞬态状态下的位置观测精度分别提高了54.16%和54.55%;
[0083]
(2)对于高谐波电流的直接转矩控制,通过减小电流谐波引起的观测误差,使转速稳定状态下的位置观测精度提高了44.89%。
[0084]
综上所述,本发明有效提高了ipmsm永磁同步电动机直接转矩控制系统的位置自感知性能。
[0085]
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1