应用于互联VSC系统结构的P-f-Udc下垂控制方法
本发明涉及的是一种智能电网控制领域的技术,具体是一种应用于互联vsc系统结构的p-f-udc下垂控制方法。
背景技术:
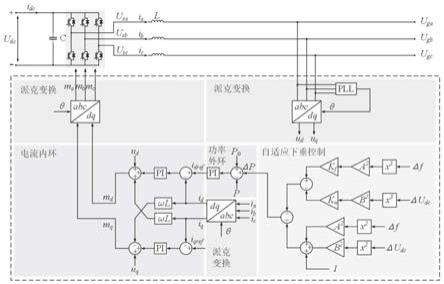
:现有互联vsc下垂控制策略大多只能维持交流频率或直流电压其中一个量的稳定,容易造成另一个量的越限,无法同时协调控制交流频率和直流电压都保持在允许范围内。一些改进的控制策略虽然同时考虑了交流频率和直流电压,但当其中一个量偏差较大时仍然会导致频率或电压的越限。本发明所提的应用于互联vsc系统结构的p-f-udc下垂控制方法不仅可以同时兼顾频率和电压的稳定,当频率或电压的偏差较大时仍可以协调二者维持在允许范围内。已有的同时考虑交流频率与直流电压的互联vsc有功下垂控制策略,需要在p-f、p-udc两种下垂控制策略间进行切换,无法避免控制模式切换过程中造成的冲击,导致系统稳定性下降。技术实现要素:本发明针对现有技术存在的上述不足,提出一种应用于互联vsc系统结构的p-f-udc下垂控制方法,可以在传统vsc的pq双闭环控制基础上,直接添加自适应下垂控制环节实现,而无需其他的附加装置,方便对已有的pq控制vsc装置进行升级,在较宽的参数取值范围内都能够保证系统的稳定性,参数取值灵活的同时,对互联vsc的有功控制平滑变化,减少了控制过程中的冲击,具有更高的稳定性。本发明是通过以下技术方案实现的:本发明涉及一种应用于互联vsc系统结构的p-f-udc下垂控制方法,根据以下计算出互联vsc有功功率之后经dq解耦双闭环控制得到调制信号进行控制,其中:p0为额定工况下互联vsc的初始传输功率,kf为频率下垂系数,f0为工频频率,f为交流微网当前运行频率,ku为直流电压下垂系数,udc0为额定直流电压,udc为直流微网当前运行电压。所述的p-f-udc下垂控制方法,通过p-f-udc下垂控制的控制系统模型分析稳定特性。技术效果与现有技术相比,本发明技术效果包括:1)本发明所提控制方法及装置可以在传统vsc的pq双闭环控制基础上,直接添加自适应下垂控制环节实现,而无需其他的附加装置,方便对已有的pq控制vsc装置进行升级。2)能够根据交流侧频率和直流侧电压的偏差情况自适应调节vsc传输有功功率,保证双端有功量都不越限。3)无需进行控制模式的切换,对互联vsc的有功控制平滑变化,减少了控制过程中的冲击,具有更高的稳定性。4)经稳定性分析验证,本发明所提的控制策略在较宽的参数取值范围内都能够保证系统的稳定性,参数取值灵活的同时,稳定性亦得到保证。附图说明图1为互联vsc系统结构系统示意图;图2为实施例双下垂控制策略函数图;图中:(a)为下垂特性曲面;(b)为p-f下垂特性切面;(c)为p-udc下垂特性切面;图3为vsc控制系统模型示意图;图4为控制系统kf变化时的特征根轨迹分析示意图;图5为控制系统ku变化时的特征根轨迹分析示意图;图6为控制系统a变化时的特征根轨迹分析示意图;图7为控制系统b变化时的特征根轨迹分析示意图;图8为实施例vsc参与调节时的仿真图;图中:(a)为频率;(b)为直流电压;(c)为vsc功率;图9为实施例vsc不参与调节时的仿真图;图中:(a)为频率;(b)为直流电压;(c)为vsc功率;图10为实施例vsc参与调节时的仿真图;图中:(a)为频率;(b)为直流电压;(c)为vsc功率;图11为实施例vsc不参与调节时的仿真图;图中:(a)为频率;(b)为直流电压;(c)为vsc功率。具体实施方式本实施例涉及一种应用于图1所示互联vsc系统结构的p-f-udc下垂控制方法,根据以下计算出互联vsc有功功率之后经dq解耦双闭环控制得到调制信号进行控制,其中:p0为额定工况下互联vsc的初始传输功率,kf为频率下垂系数,f0为工频频率,f为交流微网当前运行频率,ku为直流电压下垂系数,udc0为额定直流电压,udc为直流微网当前运行电压。当|f0-f|>>|udc0-udc|时,呈现p-f下垂关系:p=p0+kf(f0-f);当|udc0-udc|>>|f0-f|时,呈现p-udc下垂关系:p=p0-ku(udc0-udc);当|f0-f|→0,|udc0-udc|→0时,控制有功为额定值:p=p0。所述的互联vsc有功功率进一步满足:其中:a、b分别为有功p对频率偏差δf、直流电压偏差δudc的灵敏系数。所述的频率下垂系数和直流电压下垂系数的整定具体为:频率下垂系数直流电压下垂系数其中:f0为交流子网的额定频率,udc0为直流子网的额定电压,当交直流子网内部源荷平衡时可设p0=0,pacmax为交流子网频率下降到允许的最小值fmin时vsc允许向交流侧输出的最大有功功率,pdcmax为直流子网电压下降到允许的最小值udcmin时vsc允许向直流侧输出的最大有功功率。所述的频率下垂系数kf、直流电压下垂系数ku、频率偏差灵敏系数a、直流电压偏差灵敏系数b具体通过以下方式实现整定:①分析下垂控制策略的函数特性,用matlab画出其函数图像,具体为:如图2(a)所示,所提下垂控制是二元函数,其函数图像是p在空间坐标系中关于f和udc的特性曲面,为便于分析,图2(b)、(c)分别给出了所提下垂特性函数在udc和f为固定值时的切面曲线。②当udc偏差为0时图2(b)所示的p-f下垂关系,当f偏差较小时希望vsc的有功控制不要频繁动作,这一f偏差范围称为动作死区δfdb,当f的偏差超出死区范围时按照预设下垂系数kf控制vsc的有功输出,对应地:图2(b)设定δudc=0时p-f曲线的两个极点间的平缓区间为死区范围,对下垂函数求导确定对图2(c)作同样的分析:确定其中:δudb为直流电压的死区范围。建立如图3所示的vsc控制系统模型,其功率外环的传递函数为由于电流内环的带宽远大于外环,可以简化为一惯性环节其中:ts为vsc的开关周期vsc有功环可以根据瞬时功率理论得到:根据功角关系得到相角差δ,对δ微分可得到频率f;根据vsc直流电容电压方程得到直流电压udc,其中:i1为流入vsc的电流。如图4~图7所示,进一步对控制系统进行特征根分析,具体为:当下垂系数kf和ku由0变到20以及灵敏系数a、b由0变到200时,系统的特征根实部仍然为负,然而随着kf和a增大系统的主导极点与虚轴的距离出现较大变化,可以看出,虽然下垂系数和灵敏系数的大小不会导致系统失稳,但它会影响系统的动态响应速度。下垂系数取值越大,最终的频率电压偏差量越小,为了使f或udc偏差时vsc能灵敏进行功率调节,下垂系数不宜过小,为了缩短系统的调节时间,下垂系数不宜过大。综上,需要根据vsc容量同时考虑频率、直流电压偏移量和系统调节时间确定本发明的下垂系数。为验证所提下垂控制策略的有效性,本实施例在pscad仿真软件中搭建了如图1所示的混合微网仿真模型。分别对直流侧向交流侧提供功率支撑和交流侧向直流侧提供功率支撑的两种情况进行仿真验证,并比较互联vsc参与功率调节与不参与功率调节,以及与普通单侧下垂控制的效果。仿真参数如表1所示。表1仿真参数交流微网电压uac0380v交流微网频率f050hz频率下垂系数kf2mw/hz交流负荷0.5mw直流电压udc0700v直流电压下垂系数ku14mw/kv直流负荷0.5mwvsc传输有功初始值p00工况1:交流负荷波动当交流网侧负荷突然增加,导致频率跌落,直流微网功率充足,控制系统检测到频率的变化,计算出直流微网需向交流微网传输的功率,此时互联vsc工作在逆变状态。仿真开始时,交流负荷0.5mw,在2s时,交流负荷突增0.5mw。仿真结果如图8、图9所示。对比图8、图9的结果当交流负荷突增导致频率跌落时,vsc采用所提控制策略,可以对交流频率进行快速支撑,加快了频率恢复速度,减少了频率的偏差。工况2:直流负荷波动当直流网侧负荷突然增加,导致电压跌落,交流微网功率充足,控制系统检测到频率的变化,计算出交流微网需向直流微网传输的功率,此时互联vsc工作在整流状态。仿真开始时,直流负荷0.5mw,在2s时,直流负荷突增0.5mw。仿真结果如图10、图11所示。对比图10、图11的结果当直流负荷突增导致电压跌落时,vsc采用所提控制策略,可以对直流电压进行快速支撑,加快了电压恢复速度,减少了电压的偏差。综合工况1、2的仿真结果,可以论证本发明控制策略能够同时对交流频率和直流电压进行快速自适应协调控制,有效保证了混合微网系统的稳定性。上述具体实施可由本领域技术人员在不背离本发明原理和宗旨的前提下以不同的方式对其进行局部调整,本发明的保护范围以权利要求书为准且不由上述具体实施所限,在其范围内的各个实现方案均受本发明之约束。当前第1页12
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1