电驱动系统的改进的声学行为的带宽划分谐波调节的制作方法
电驱动系统的改进的声学行为的带宽划分谐波调节
背景技术:
1.旋转电机用于车辆动力系和其它电驱动系统中以将马达扭矩传递到联接的负载。在具有转子和绕线定子的径向磁通型电机中,转子由定子围绕并且由径向气隙与定子分开。当定子的励磁绕组由高压电源顺序地激励时,转子和整体地连接的转子轴一致地旋转,该高压电源通常为功率逆变器和高压电池组的形式。由通电的电机产生的马达扭矩被传递到联接的负载以执行工作,例如,发电、曲柄转动和起动内燃机,和/或根据应用为一个或多个车轮、螺旋桨叶片、传动带或其它联接的机械负载提供动力。
2.空间通量谐波和功率逆变器非线性可能导致电驱动系统经历不期望的扭矩波动和电流波动的时段。通常由诸如定子-转子未对准的机械设计因素产生的集体波动现象倾向于与传动系动力学相互作用,以产生不期望的传动系振动和其它噪声、振动和不平顺性(nvh)效应。扭矩波动特别地指马达总输出扭矩中的周期性变化,其中总输出扭矩包括马达的平均产生的输出扭矩和相关联的扭矩波动。类似地,电流波动描述了馈入上述定子励磁绕组的电机驱动电流中的旋转引起的波动。由于诸如电流波动引起的电磁干扰和声噪声的因素,电流波动趋于加剧上述扭矩波动的nvh效应。
技术实现要素:
3.本文公开了用于控制电驱动系统内的旋转电机的操作的系统、相关联的控制逻辑和方法,目的是减少或理想地消除上述扭矩波动和电流波动的多个谐波阶次。另外的目标益处包括降低声学噪声和其它机械噪声、振动和不平顺性(nvh)效应,或者如果需要,引入特定谐波阶次的特定声学音调(acoustic tone)以分散或补充现有谐波阶次。因此,本控制方案是高度可定制的,以便以适合应用的方式调节电驱动系统内的谐波处理。
4.本文阐述的教导提供了谐波调节器的带宽划分,谐波调节器即最终控制电压指令的产生和向电机传送电压指令的驻留控制器的逻辑块。如上所述,本文描述的解决方案还使得能够在预定谐波阶次选择性地注入谐音,以便调节电驱动系统的声学行为。特别地,本教导在电流域或磁通域中采用谐波调节器的带宽划分以提供可配置的控制拓扑,即,可以被调谐以在给定的扭矩-速度操作点处解决一个或多个高阶谐波的控制拓扑,如本文所阐述的。
5.电机控制系统通常传统上对高次谐波和相关扭矩扰动提供相对弱的衰减,并且通常在低机器旋转速度下操作。例如,典型的电驱动控制解决方案可以采用同步系滤波器与在低带宽中操作的比例积分/pi调节器的组合,以便执行谐波电流调节而不理解谐波参考系中的机器参数的变化。另外,这种方法试图通过谐波电流指令的传输来消除不期望的扭矩波动,而不将磁通的谐波参考系变化理解为输出扭矩的函数。
6.相反,在本文详细描述的解决方案旨在借助于上述带宽划分谐波调节器(bandwidth-partitioning harmonic regulator)以高得多的机器旋转速度操作。如本文所使用的,术语“带宽划分”是指在多个不同谐波阶次(例如,在示例性应用中的第3阶、第6阶和/或第12阶谐波)上有目的地分配可用带宽。在本公开的范围内,本带宽划分控制策略
使得具有不同带宽和频率过程变化的控制器的组合能够实现更高的带宽,并且相对于现有方法提供更高的抗干扰特性。本公开实现的带宽划分的结果是能够在没有直流(dc)分量误差的情况下无相位滞后地操作。
7.在本文认识到,空间谐波倾向于引起沿着旋转电机的直轴(d轴)和交轴(q轴)的磁通量分量的波动。主波动频率通常包括6阶谐波,尽管情况不一定如此。因此,本方法使得能够实现谐波和声学性能的应用特定调谐,以减少6阶谐波和/或其它目标有问题的谐波阶次的影响和/或消除它们,其中所公开的带宽划分方法促进了这种谐波性能可调谐性。
8.在各种实施例中,本发明的可配置控制装置作为电机的总输出扭矩和旋转/角速度的函数来操作,在该实例中,电机是高压电力牵引马达,其中注入相位角的可能的基于操作点的变化考虑了谐波参考系中作为负载扭矩的函数的磁通的变化。此外,本方法可用于对d轴和q轴电流指令进行整形,以紧密地遵循实时变化的扭矩曲线,而不是传统方式中的恒定最大扭矩每安培(mtpa)曲线。
9.本文公开了一种用于控制旋转电机的操作的方法。本方法的特定实施例包括经由车载电子控制单元/控制器的谐波补偿调节器(hcr)逻辑块接收电机的指令扭矩和旋转速度。该方法包括经由hcr逻辑块响应于一组启用条件来计算dq谐波补偿电流和dq谐波补偿电压。这是使用指令的扭矩和旋转速度针对预定谐波阶次完成的,其中谐波补偿电流和电压被配置为消除预定谐波阶次中的扭矩波动和电流波动。
10.该方法还包括将dq谐波补偿电流和dq谐波补偿电压分别与dq电流指令和dq电压指令相加,以产生经调节的dq电流指令和经调节的dq电压指令。该方法之后包括使用经调节的dq电流指令和经调节的dq电压指令来控制电机的操作。
11.hcr逻辑块可以将每个谐波阶次的dq谐波补偿电流加在一起和每个谐波阶次的dq谐波补偿电压加在一起,以便分别产生谐波补偿电流和谐波补偿电压。
12.该方法可另外包括根据指令扭矩、旋转速度和dc总线电压电平经由控制器的扭矩到电流逻辑块产生dq电流指令。
13.扭矩到电流逻辑块可以可选地实施为由指令扭矩、旋转速度和dc总线电压电平索引或参考的查找表。
14.在一些实施例中,电机连接到牵引功率逆变器模块(tpim),在这种情况下,该方法包括:从调节的dq电流指令中减去电机的实际dq电流以得到dq电流误差值,使用dq电流误差值经由hcr逻辑块产生经调节的dq电压指令,以及将经调节的dq电压指令转换为相电流指令。该方法之后包括将相电流指令提供给tpim以激励电机。
15.本文所构想的hcr逻辑块可以包括前馈谐波补偿发生器(ff hc-gen)逻辑块和谐波补偿调节器(hc-reg)逻辑块。在这样的实施例中的方法可以包括:经由hc-reg逻辑块确定和输出dq谐波补偿电流,经由hc-reg逻辑块确定和输出dq谐波补偿电压,以及经由ff hc-gen逻辑块的缩放块斜变dq谐波补偿电流。
16.在这种配置中的ff hc-gen逻辑块可包括配置成提供单独的d轴和q轴谐波补偿电流的电流幅值查找表,以及配置成提供谐波补偿相位调节的相位注入查找表。ff hc-gen逻辑块还可包括空块,其中该方法包括根据指令的扭矩和旋转速度经由零块/空块选择性地将单独的d轴和q轴谐波补偿电流归零。
17.作为本方法的一部分,hc-reg逻辑块可以包括用于谐波阶次中的每个相应谐波阶
次的多个单独的控制回路,其中,回路中的每个具有可选择的比例和积分增益块以及频率校正块。经由hc-reg逻辑块确定和输出dq谐波补偿电压可以包括:计算每个谐波阶次的相应的谐波特定的dq谐波补偿电压,以及将相应的谐波特定的dq谐波补偿电压加在一起,从而产生dq谐波补偿电压。
18.该方法的一些实施例可以包括使用hcr逻辑块以预定谐波阶次注入可听音调。
19.hcr逻辑块可以可选地在磁通域(magnetic flux domain)中操作。在这样的实施例中,该方法可以包括:将来自ff hc-gen逻辑块的dq谐波补偿电流转换成dq谐波补偿通量,以及计算dq谐波补偿通量误差值。作为该方法的一部分采取的附加动作可以包括:将dq谐波补偿通量误差值发送到hf-reg逻辑块,以及使用dq谐波补偿通量误差值经由hc-reg逻辑块确定和输出dq谐波补偿电压。
20.本文还公开了一种电驱动系统。在可能的配置中,该电驱动系统包括电池组、联接到负载的旋转电机、连接到电池组和旋转电机的tpim、以及与tpim通信的控制器。控制器被配置为执行上面概述的方法。
21.本发明还包括如下方案:方案1. 一种用于控制旋转电机的操作的方法,所述方法包括:经由控制器的带宽划分谐波补偿调节器(hcr)来接收电机的指令扭矩和旋转速度;经由所述hcr响应于一组启用条件,使用所述指令扭矩和所述旋转速度针对一个或多个预定谐波阶次计算dq谐波补偿电流和dq谐波补偿电压,其中所述谐波补偿电流和谐波补偿电压被配置为选择性地消除所述一个或多个预定谐波阶次中的扭矩波动和电流波动;将所述dq谐波补偿电流和所述dq谐波补偿电压分别加到dq电流指令和dq电压指令上,以产生经调节的dq电流指令和经调节的dq电压指令;以及使用所述经调节的dq电流指令和所述经调节的dq电压指令来控制所述电机的操作,包括消除所述一个或多个预定谐波阶次中的扭矩波动和电流波动中的一者或多者。
22.方案2. 根据方案1所述的方法,其中,所述一个或多个预定谐波阶次包括多个谐波阶次,并且其中,所述hcr被配置为将针对所述多个谐波阶次中的每个谐波阶次的dq谐波补偿电流和dq谐波补偿电压分别加在一起,从而产生所述谐波补偿电流和所述谐波补偿电压。
23.方案3. 根据方案1所述的方法,其中所述电机连接到具有dc总线电压电平的直流(dc)电压总线,所述方法还包括根据所述指令扭矩、所述旋转速度和所述dc总线电压电平使用所述控制器的扭矩到电流逻辑块来产生所述dq电流指令。
24.方案4. 根据方案3所述的方法,其中所述扭矩到电流逻辑块是由所述指令扭矩、所述旋转速度和所述dc总线电压电平索引或引用的查找表。
25.方案5. 根据方案1所述的方法,其中所述电机连接到牵引功率逆变器模块(tpim),所述方法还包括:从经调节的dq电流指令中减去所述电机的实际dq电流以得到dq电流误差值;使用所述dq电流误差值经由所述hcr逻辑块产生经调节的dq电压指令;将经调节的dq电压指令转换成相电流指令;以及
向所述tpim提供所述相电流指令,从而激励所述电机。
26.方案6. 根据方案1所述的方法,其中所述hcr包括前馈谐波电流产生逻辑块(ff hc-gen)逻辑块和谐波电流调节器(hc-reg)逻辑块,所述方法包括:经由所述hc-reg逻辑块确定并输出所述dq谐波补偿电流;以及经由所述所述hc-reg逻辑块确定并输出所述dq谐波补偿电压;以及经由所述ff hc-gen逻辑块的缩放块使得所述dq谐波补偿电流斜变。
27.方案7. 根据方案6所述的方法,其中所述ff hc-gen逻辑块包括配置成提供分开的d轴和q轴谐波补偿电流的电流幅值查找表、以及配置成输出谐波补偿相位调节的相位注入查找表。
28.方案8. 根据方案7所述的方法,其中所述ff hc-gen逻辑块包括空块或零块,所述方法包括根据所述指令扭矩和所述旋转速度经由所述空块或零块选择性地无效或归零单独的d轴和q轴谐波补偿电流。
29.方案9. 根据方案6所述的方法,其中所述hc-reg逻辑块包括针对所述谐波阶次中的每个相应的谐波阶次的多个单独的控制回路,所述回路中的每个具有可选择的比例和积分增益块以及频率校正块,其中经由所述hc-reg逻辑块确定并输出所述dq谐波补偿电压包括:针对所述谐波阶次中的每个计算相应的谐波特定的dq谐波补偿电压,并且将所述相应的谐波特定的dq谐波补偿电压加在一起以由此产生所述dq谐波补偿电压。
30.方案10. 根据方案6所述的方法,其中所述hcr在磁通域中操作,所述方法还包括:将来自所述ff hc-gen逻辑块的dq谐波补偿电流转换成dq谐波补偿通量;计算dq谐波补偿通量误差值;将所述dq谐波补偿通量误差值发送到所述hf-reg逻辑块;以及使用所述dq谐波补偿通量误差值经由所述hc-reg逻辑块确定并输出所述dq谐波补偿电压。
31.方案11. 根据方案1所述的方法,还包括使用所述hcr以预定谐波阶次选择性地注入可听音调。
32.方案12. 一种电驱动系统,包括:电池组;旋转电机,其联接到负载;连接到所述电池组和所述旋转电机的牵引功率逆变器模块(tpim);以及控制器,其与所述tpim通信并且被配置为:经由所述控制器的带宽划分谐波补偿调节器(hcr)来接收所述电机的指令扭矩和旋转速度;经由所述hcr响应于一组启用条件,使用所述指令扭矩和所述旋转速度针对一个或多个预定谐波阶次计算dq谐波补偿电流和dq谐波补偿电压,其中所述谐波补偿电流和谐波补偿电压被配置为地消除所述一个或多个预定谐波阶次中的扭矩波动和电流波动;将所述dq谐波补偿电流和dq谐波补偿电压分别加到dq电流指令和dq电压指令上,以产生经调节的dq电流指令和经调节的dq电压指令;以及使用所述经调节的dq电流指令和所述经调节的dq电压指令来控制所述电机的操作。
33.方案13. 根据方案12所述的电驱动系统,其中,所述一个或多个预定谐波阶次包括多个谐波阶次,并且其中,所述hcr逻辑块被配置为将针对所述多个谐波阶次中的每个谐波阶次的dq谐波补偿电流和针对所述多个谐波阶次中的每个谐波阶次的dq谐波补偿电压加在一起,从而分别产生所述谐波补偿电流和所述谐波补偿电压。
34.方案14. 根据方案12所述的电驱动系统,其中,所述控制器被配置为使用所述hcr逻辑块来选择性地以预定的谐波阶次来注入可听音调。
35.方案15. 根据方案12所述的电驱动系统,其中,所述控制器还被配置为:从经调节的dq电流指令中减去电机的实际dq电流以得到dq电流误差值;使用所述dq电流误差值经由所述hcr逻辑块产生经调节的dq电压指令;将所述经调节的dq电压指令转换成相电流指令;以及向所述tpim提供所述相电流指令,从而激励所述电机。
36.方案16. 根据方案12所述的电驱动系统,其中,所述hcr包括前馈谐波电流产生逻辑块(ff hc-gen)逻辑块和谐波电流调节器(hc-reg)逻辑块,所述控制器还被配置为:经由hc-reg逻辑块确定并输出所述dq谐波补偿电流;以及经由所述hc-reg逻辑块确定并输出所述dq谐波补偿电压;以及经由所述ff hc-gen逻辑块的缩放块使得dq谐波补偿电流斜变。
37.方案17. 根据方案16所述的电驱动系统,其中,所述ff hc-gen逻辑块包括配置成提供单独的d轴和q轴谐波补偿电流的查找表、以及配置成提供谐波补偿相位调节的相位注入查找表。
38.方案18. 根据方案17所述的电驱动系统,其中,所述ff hc-gen逻辑块包括空块或零块,并且所述控制器还被配置为根据所述指令扭矩和所述旋转速度经由所述空块或零块选择性地无效或归零单独的d轴和q轴谐波补偿电流。
39.方案19. 根据方案17所述的电驱动系统,其中,所述hc-reg逻辑块包括针对所述谐波阶次中的每个相应的谐波阶次的多个单独的控制回路,所述回路中的每个具有可选择的比例和积分增益块以及频率校正块,其中所述控制器被配置为经由所述hc-reg逻辑块如下地确定和输出所述dq谐波补偿电压:针对所述谐波阶次中的每个计算相应的谐波特定的dq谐波补偿电压,并且之后将所述相应的谐波特定的dq谐波补偿电压加在一起以产生所述dq谐波补偿电压。
40.方案20. 根据方案17所述的电驱动系统,其中,所述hcr在磁通域中操作,并且所述控制器还被配置为:将来自所述ff hc-gen逻辑块的dq谐波补偿电流转换成dq谐波补偿通量;计算dq谐波补偿通量误差值;将所述dq谐波补偿通量误差值发送到所述hf-reg逻辑块;以及使用所述dq谐波补偿通量误差值经由所述hc-reg逻辑块确定并输出所述dq谐波补偿电压。
41.从对用于执行所描述的公开的实施例和最佳模式的以下详细描述结合附图和所附权利要求书,本公开的上述特征和优点以及其他特征和优点将是显而易见的。
附图说明
42.图1是具有电驱动系统和被配置为执行如本文所述的方法的控制器的示例性机动车辆的示意图。
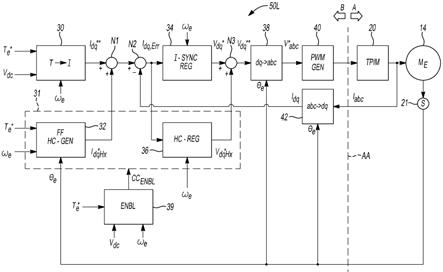
43.图2是描述用于实施本方法的实施例的示意性控制逻辑图。
44.图3和图4分别描述了前馈谐波电流产生逻辑块和带宽划分谐波电流调节器逻辑块,两个逻辑块都可用作图2所示的控制逻辑的一部分。
45.图5和图6是磁链(竖直轴)对比电角度(水平轴)的曲线图,描述了提供注入相位角的操作点变化的本公开的方面。
46.图7是图2实施方式的替代实施例,其中谐波分量在通量域中被控制,而基波分量在电流域中被控制。
47.图8是图7实施方式的替代实施例,其中谐波和基波分量在通量域中被控制。
48.图9是可与图8的配置一起使用的替代带宽划分谐波电流调节器逻辑块。
49.图10和图11是可用作本方法的一部分的通量-电流查找表的代表性实施例。
50.图12和图13分别是相对于基线水平的振动减少和噪声减少的代表性曲线图。
具体实施方式
51.本公开容许许多不同形式的实施例。本公开的代表性示例在附图中示出并且在本文中详细描述为所公开的原理的非限制性示例。为此,在摘要、背景技术、发明内容、附图说明和具体实施方式部分中描述的但未在权利要求中明确阐述的元件和限制不应通过暗示、推断或其他方式单独或共同地并入权利要求中。
52.为了本说明书的目的,除非特别地放弃:单数包括复数,反之亦然;词语“和”和“或”应既是连接性的又是分离性的;词语“任何”和“全部”都应表示“任何以及全部”;并且词语“包括”、“包含”、“涵盖”、“具有”及其置换均应表示“包括而没有限制”。此外,近似词,例如“大约”、“几乎”、“基本上”、“大致”、“近似”等,可以在例如“在、接近或几乎在”或“在0-5%内”或“在可接受的制造公差内”或其任何逻辑组合的意义上在本文中被使用。
53.参考附图,其中相同的附图标记表示相同的部件,图1示意性地示出了具有如本文所述配置的电驱动系统11的机动车辆10。电驱动系统11包括旋转电机(me) 14,其操作通过来自车载控制器(c) 50的控制信号(箭头cco)实时地调节和控制。用于实施下面参考图2-13描述的控制逻辑50l、150l或250l的指令100被记录在控制器50的存储器(m)中,并且由一个或多个处理器(p)执行以提供本文描述的益处。
54.作为示例而非限制,这些益处包括在电驱动系统11的正在进行的操作期间平滑输出扭矩产生和衰减噪声。控制器50通过如下所述的谐波调节器带宽划分实现这些目的,具有多个预定扭矩和电流波动谐波阶次的有目标的消除以及注入相位角的有目的变化。本带宽划分控制方案的其它优点包括选择性地以特定谐波阶次注入预定的声学音调的能力。例如,在图1的机动车辆10中,可以引入较低谐波阶次(例如第1或第3谐波阶次)的可听声音,以便从另一可能更高阶谐波(例如第6或第12谐波阶次)发出的声学和/或机械声音在声学上使机动车辆10的操作者分心;和/或补充在电机14的扭矩产生操作期间产生的另一谐波阶次。
55.图1的控制器50可以被实施为响应于输入信号(箭头cc
in
)的一个或多个电子控制
单元或计算节点。控制器50包括专用数量的存储器(m)和一个或多个处理器(p),例如微处理器或中央处理单元,以及其它相关硬件和软件,例如数字时钟或定时器、输入/输出电路、缓冲电路等。存储器(m)可以包括足够数量的只读存储器,例如磁或光存储器。为了描述简单,本文使用的术语“控制器”可以包括一个或多个电子控制模块、单元、处理器及其相关硬件部件,包括图2-4、7和8所示的逻辑50l、150l或250l、专用集成电路(asic)、片上系统(soc)、电子电路和提供编程功能所需的其它硬件。
56.进一步关于图1中所示的电驱动系统11,示出了电机14的示例性实施例,其中定子14s相对于转子14r以径向通量型配置同轴布置。定子14s因此围绕转子14r。然而,在本公开的范围内可使用电机14的其它实施例,包括轴向磁通型电机,因此图1的电机14的简化的代表性实施例仅示出了一种可能的配置。
57.在图1的代表性实施例中,电机14是多相/交流(ac)牵引马达,用于产生总输出扭矩(箭头to),并用于将其传递到与转子14r联接的输出构件17。在示例性机动车辆10中,输出构件17经由一个或多个驱动轴19连接到一个或多个车轮15,输出扭矩(箭头to)驱动车轮15的旋转以便推进机动车辆10。其它可能的布置可以将电机14直接放置在一个或多个单独的车轮15上或与其紧密接近,和/或电机14有时可以用作发电机以便为机动车辆10上的其它部件供电,因此图1所示的配置是本教导的示例而非限制性的。
58.当电机14被配置为汽车推进应用中典型的多相/ ac装置时,定子14s的相应励磁绕组(未示出)的激励需要从车载电源提供输入功率。为此,电驱动系统11可包括高压电池组(b
hv
) 16,例如,多电池可再充电锂离子构造或其它合适的电池化学。虽然术语“高压”是相对于典型的12-15v辅助/低压电平来说的,并且因此“高压”可能需要超过其的电压电平,但是本文所设想的类型的示例性混合动力电动车辆(hev)或全电池电动车辆(bev)推进应用可能需要电池组16具有例如300v或更高的电压能力。
59.电池组16通过高压直流电压总线(vdc)电连接到牵引功率变换器模块(tpim) 20,tpim 20继而通过高压ac电压总线(vac)电连接到定子14s。尽管为了说明的简单而省略,tpim 20被内部配置并且经由半导体开关的多个管芯的on/off状态控制而被外部控制,其中这样的开关通常被实施为igbt或mosfet。因此,通过将tpim 20的操作切换为ac输出电压,对tpim 20的dc输入电压进行逆变,以便以其作为推进或牵引马达的能力为电机14供电。在再生充电事件期间,tpim 20可以相反的方式操作,即,将ac输入电压转换成dc输出电压,以便对电池组16的组成电池单元再充电。
60.其它部件可以连接到电驱动系统11,例如但不限于所示的dc-dc转换器18和辅助电池(b
aux
) 160。如上所述,辅助电压电平通常为12-15v,因此dc-dc转换器18可通过内部开关操作和信号滤波而操作,如本领域所理解的,以从dc电压总线(vdc)接收相对高的dc电压并向辅助电池160输出较低的辅助电压(v
aux
)。因此,电机14仅是在机动车辆10的正在进行的推进操作期间需要从电池组16可靠且持续地提供电能的多个装置中的一个。
61.参考图2,图1中所示的控制器50可以用控制逻辑50l编程,该控制逻辑适于解决当操作电驱动系统11时、特别是在图1的旋转电机14的推进扭矩产生操作期间各种不期望的扭矩波动引起的nvh效应和电流波动引起的nvh效应。为了简单起见,线aa将物理系统(箭头a)与由示例性控制逻辑50l实施的分立控制系统(箭头b)分开。物理系统(箭头a)包括tpim 20、电机14和旋转位置传感器(s) 21,例如编码器或解析器,后者相对于转子14r (图1)联
接或定位,以测量和输出转子14r (图1)的旋转/角位置(箭头θe),如本领域技术人员将理解的。同样,图2和其余的图使用上标“*”表示指令信号,其中缺少这样的星号符号表示所测量的、计算的或估计的状态值,该状态值本身不一定在控制逻辑50l的上下文中用作指令值。
62.图2中描述的控制逻辑50l的组成逻辑块的各种输入信号被包括在图1中以简化形式示出的输入信号(箭头cc
in
)中。如本领域普通技术人员将理解的,用于电牵引马达(例如示例性旋转电机14)的控制系统接收:电机14的所测量的、计算的或估计的角/旋转速度(ωe);所指令的扭矩(箭头),例如由控制器50或另一控制模块响应于驾驶员输入(例如加速踏板请求)而得到;以及dc总线电压(v
dc
)的大小,即,图1中示意性示出的dc电压总线(vdc)的当前测量或报告的电压电平。电机14的旋转速度(ωe)可以从由位置传感器21报告的测量角位置(θe)实时得到,为了清楚示出,示出了两个信号。
63.控制逻辑50l的扭矩到电流逻辑块30接收所述输入,并且此后将所指令的直轴(d轴)和交轴(q轴)电流指令输出到求和节点n1,为了简单起见,所述电流指令在图2中以矢量符号以矢量符号表示。在逻辑块30的下游,同步电流调节器(i-sync reg)逻辑块34接收电机14的上述旋转速度(ωe)形式的输入,以及来自减法节点n2的i
dq
误差信号(箭头i
dq,err
),误差信号的来源和使用将在下面描述。作为响应,逻辑块34输出d轴和q轴(dq)电压指令,在图2中缩写为。该输出经由求和节点n3与来自谐波补偿调节器(hc-reg)逻辑块36的谐波补偿电压分量相加,同样在下面详细描述。求和节点n3的输出是经调节的dq电压指令(),其继而被馈送到参考系转换逻辑块38 (
“”
)。
64.如
“”
符号所示,图1的控制器50使用参考系转换逻辑块38以将经调节的dq电压指令()转换到与电机14的特定配置相关的多相参考系中。在电机14的典型三相实施例中的这些相在本领域中名义上被称为a、b和c相,为了一致性,在本文采用惯例。逻辑块38因此将abc相电压指令()输出到脉宽调制发生器(“pwm gen”)逻辑块40。作为响应,逻辑块40产生适当的on/off控制信号,用于改变容纳在tpim 20内的驻留半导体开关(未示出)的相应on/off导通切换状态。tpim 20此后将相位特定的电驱动电流/电压传递到旋转电机14的定子14s (图1),其中为了清楚和简单起见,a、b和c相的这种电流在图2中缩写为i
abc
。
65.仍然参考图2的示例性控制逻辑50l,先前提到的测量的角位置(θe)然后作为电信号被发送到另一参考系转换块42 (
“”
),其反转先前由逻辑块38执行的参考系变换函数,即,将各个相电流i
abc
转换成对应的d轴和q轴电流(i
dq
)。然后,在节点n2处将d轴和q轴电流(i
dq
)相减,以得到i
dq
误差信号(i
dq, err
)。
66.带宽划分谐波补偿:图2的控制逻辑50l的方面用于电力牵引马达(例如图示的电机14)的现有技术控制,并且因此在本领域中是公知的。这些功能包括执行基本dq和abc参考系转换、使用误差信号作为pi控制架构、和pwm或其它高速开关控制原理中的反馈控制技术,用于控制半导体开关的on/off导通状态。对于这些功能,本公开的控制逻辑50l添加带宽划分谐波补偿调节器31,其中谐波补偿调节器31如下所述地配置以减少图1的电驱动系统11内的不期望的波动引起的振动和声学噪声。
67.在本文介绍的带宽划分谐波补偿调节器31包括两个主要功能部件:(1)前馈谐波电流产生逻辑块32 (“ff hc-gen”),以及(2)上文简要提到的谐波电流调节器逻辑块36。组成逻辑块32、36分别产生谐波补偿电流分量(i
dq*hx
)并将其输出到求和节点n1以及产生谐波补偿电压分量(v
dq*hx
)并将其输出到求和节点n3,其中,各分量(i
dq*hx
和v
dq*hx
)一起消除了电流和扭矩波动的多个目标谐波阶次,如下所述。
68.关于前馈谐波电流产生逻辑块32,逻辑块32的输入包括电机14的上述指令的扭矩(箭头)和旋转速度(ωe)。对于电机14的具体配置,图1的控制器50可以编程有由指令的扭矩(箭头)和旋转速度(ωe)值索引或引用的一组查找表。因此,在给定情况下应用的谐波补偿电流分量(i
dq*hx
)的操作点特定值可从这种查找表中提取并被馈送到求和节点n1,或者在其它实施方式中实时计算的这种值。
69.类似地,谐波电流调节器逻辑块36接收电机14的旋转速度(ωe),并且使用另一查找表或计算,将谐波补偿电压分量(v
dq*hx
)输出至求和节点n3。谐波补偿调节器31及其组成逻辑块32和34的操作可以由启用逻辑块39 (“enbl”)选择性地启用,enbl的输入包括指令扭矩(箭头)、旋转速度(ωe)和dc电压(vdc),并且enbl的输出包括启用信号(箭头cc
enbl
)。也就是说,本教导允许根据扭矩和速度而高度可配置地启用控制特征,着眼于可用的dc总线电压。如下面进一步详细解释的,用于实现谐波补偿调节器31的查找表的总体或基础方程的校准需要电驱动系统11的准确的对象特征化和nvh分析,以分别确定和微调谐波补偿电流和电压分量i
dq*hx
和v
dq*hx
的幅值,以有效消除多个谐波阶次的扭矩波动和电流波动。
70.现在参考图3,针对任意数量(n)的不同谐波阶次描绘了图2的上述前馈谐波电流产生逻辑块32的示例性实现。在确认给定谐波阶次的启用条件时,例如,名义上称为hx1,如图所示,谐波分量在节点n6处乘以从图1的位置传感器21接收的角位置()。
71.逻辑块32的所示代表性拓扑因此允许(n)个特定谐波,即hx1、
…
、hxn,其中的每个可以由控制器50单独隔离和处理以微调扭矩和电流波纹消除性能,并且提供如下所述的其它益处。例如,在一些实施例中,图3中标记为hx1的谐波阶次可以是第6谐波、第12谐波或另一目标谐波阶次。因此,逻辑块32可以被划分为多个子块32-a、
…
、32-n。由于可以以类似的方式处理每个谐波分量,所以子块32-a和32-n除了
“‑
n”符号之外是示意性相同的,如本领域技术人员将理解的。因此,子块32-a的描述适用于子块32-n,为了简单和简洁,省略了子块32-n的单独描述。
72.图3的子块32-a可以由启用逻辑块39选择性地启用,所述启用逻辑块可以由图1的
电机14的实际或估计输出扭矩(te1, te2, te3, te4)和/或由实际或估计旋转速度(ω
e1
, ω
e2
, ω
e3
, ω
e4
)通知。逻辑块39中的向上箭头表示启用(enbl),向下箭头表示子块32-a的所述计算功能的禁用(dsbl) 。类似的启用逻辑39-n可用于使用图2的控制逻辑50l处理的每个附加谐波分量。所述输出扭矩t
e1
和t
e2
形成相互对,输出扭矩t
e3
和t
e4
也是如此。
73.因此,启用逻辑块39的可能实施例可能需要在额定扭矩te2和/或额定速度ω
e2
处启用子块32-a,但直到扭矩/速度降到由扭矩te1和速度ω
e1
指示的较低值以下才停用子块32-a。对于较高的扭矩te3和te4以及相应的速度ω
e3
和ω
e4
,也可以发生相同的情况,使得对于谐波感应nvh特别成问题的特定扭矩或速度,可以实现谐波处理的调节和子块32-a的前馈调节。
74.对于图3的子块32-a,缩放块60接收旋转速度(ωe)作为输入,然后平滑地缩放其输出以防止扭矩的突然变化。如将理解的,对控制输入中的快速波动的马达控制响应趋向于导致电压尖峰,其中用户可感知的传动系振动是潜在的影响。因此,缩放块60可输出具有在0和1之间的无单位的值的谐波缩放因子(箭头h
x1
s),其中基于期望响应来校准斜变率(ramp rate)。
75.子块32-a的实施还需要使用查找表(lut) 61、62和63,其中查找表61、62和63中的每一个由旋转速度()和指令扭矩(箭头)索引。查找表61根据扭矩和速度输出d轴和q轴谐波补偿分量(分别为箭头i
dhx1,mag
和i
qhx1,mag
)。这些值在各自的节点n4和n5处通过乘法(如图3中的“x”所示)以谐波缩放因子(箭头h
x1
s)缩放。类似地,查找表62输出用于正被处理的谐波分量的相位注入分量
ϕ
hx1
,例如第6谐波阶次,其在节点n7处从节点n6的输出(h
x1
)被减去以产生相位误差信号(箭头
ϕ
err
)。以这种方式,查找表62有效地注入特定的声学音调,从而得到电驱动系统11中的减小的声学噪声。
76.然后,子块32-a计算相位误差信号(箭头
ϕ
err
)的正弦(sin)和余弦(cos),此后将余弦值和正弦值分别馈送到节点n8和n9。节点n8的输出是校正谐波分量hx1所需的d轴电流分量,即箭头i
dhx1
。类似地,节点n9提供校正谐波分量hx1所需的q轴电流分量,即箭头i
qhx1
。如果需要,可以对附加谐波阶次执行子块32-a的逻辑流,这将产生校正附加谐波分量hxn所需的附加d轴和q轴电流分量。
77.逻辑块32-n内示出的求和节点n10和n11可用于将各种d轴和q轴电流分量相加,然后将总和馈送到标量到矢量(
“”
)计算逻辑块64,其继而输出图2所示的上述谐波补偿电流分量(i
*dqhx
)。查找表63 (“0-hx1指令(0-hx1 command)”)通过根据指令的扭矩和旋转速度选择性地使单独的d轴和q轴谐波补偿电流无效或归零而用作空/零块。块63可以用于防止在旋转速度(ωe)和马达扭矩(t
e )的特定组合处/作为旋转速度和马达扭矩的函数校正相应的谐波,即通过向节点n8和n9输出空/零值。
78.因此,子块32-a至32-n的示例性配置使得能够根据扭矩和速度实现相位角的操作点变化,以便消除扭矩波动。所示逻辑流和电路拓扑提供了消除多个阶次的扭矩和电流波动的能力,其中每个谐波具有如图所示的相应子块32-n,用于电机14的给定实施例的可调谐性和精确校准。
79.现在转向图4,图2的谐波电流调节器逻辑块36可以如图所示被实施,并与同步电
流调节器块34结合使用。所示的拓扑允许在块44和46处设置谐波比例增益和积分增益k
pdq,hx1
和k
idq,hx1
,并且还允许上述带宽划分,即,将逻辑块36划分为用于对应谐波带宽的单独控制回路,同时保持同步电流调节器带宽。
80.在图4内,节点n3将调整后的dq电压指令()作为来自逻辑块34的dq电压指令()和来自逻辑块36的谐波补偿电压分量(v
dq*hx
)之和输出 ,谐波补偿电压分量的值可能通过限制块56(“lim”)(例如,带通滤波器)限制在校准范围内。 谐波电流调节器逻辑块36因此使得能够进行带宽划分以提供单独地调节或处理多个谐波阶次的能力。
81.相对于提供对较高阶干扰的弱衰减的现有方法,图4的控制逻辑拓扑具有较高的带宽和相应的改进的干扰抑制。例如,当以更高的速度运行电机14时,可以经历更高阶的nvh效应,其中图4所示的解决方案与图3的前馈谐波电流产生逻辑块32结合使用,以提供本文公开的各种nvh相关的改进。
82.在所描述的实施例中,来自图2的节点n2的上述误差信号(i
dq
,
err
)被馈送到逻辑块34,并且对于要由图1的控制器50处理的(n)个不同谐波分量中的每个,馈送三个一组的处理块44、46和48。因此,图4示出了使用校准的时域参数块52 (即,具有采样频率ts)和具有积分器块54 (z-1 )的离散pi控制设置。块44和56应用上述预定比例或积分增益到被处理的谐波分量、名义上为hx1的(例如,典型实施例的第6或第12谐波阶次)。
83.理论和支持:在进行图5-13的讨论之前,提供对本解决方案的一些控制原理的数学/理论支持。如将理解的,用于电机的典型dq参考系中的时变电压方程表达如下:其中 和是以安培(a)为单位的d轴和q轴电流,和是以伏特(v)为单位的d轴和q轴电压,r是以欧姆为单位的定子绕组电阻,并且和是以wb为单位的d轴和q轴磁链。时变磁链可以写为其中是由定子激励引起的d轴磁链,是由永磁体磁通或转子磁通引起的d轴磁链,而是由定子激励引起的d轴磁链,并且是由永磁体磁通或转子磁通引起的q轴磁链。
84.如果假设d轴与永磁体磁链
ꢀꢀ
对齐,则上述方程(3)和(4)可以写为:
因此,当图1的转子14r正在旋转时,时变磁链
,
是d轴和q轴电流id和iq、马达温度t、以及角位置的函数。这捕获了饱和和交叉耦合效应(cross coupling effect)以及空间谐波效应。
85.派生项可以如下展开:其中是单位为(h)的d轴自增量电感,是相互q轴自增量电感,并且和是d轴和q轴之间的相互增量电感,示出交叉耦合性质。增量电感被给定为磁链与电流之间的关系之间的切线斜率。当设计图1的控制器50时,这些变量是必需的,因为它们负责瞬态响应。
86.与增量电感相反,表观电感被定义为磁链和电流之间的线性化关系的斜率,其可以被定义为:项和可以由表观电感项表示为用于使对象线性化(linearizing the plant)的过程的一部分。
87.从这里开始,和被隐含为,除非另有说明。
88.通过使用上述方程(9)-(14)导出的关系,并且通过应用这些关系到方程(1)和
(2),考虑到空间谐波、交叉耦合和饱和效应,电压方程可以如下扩展以描述图1的电机14的对象:本文考虑的空间谐波是通量的波动或脉动,并且可以进一步分解为基波分量和谐波,其中主频率通常是第6、第12(hxn)阶次,但是可以根据电机配置而变化。
89.磁通图的示例在图10和11中被示出,其中所示的轮廓代表所示的值变化,并且通常表示磁通是d轴和q轴电流(即分别id和iq)的函数。温度t的影响可以被额外地补偿。
[0090] 项的示例被表示为电角度的函数,其中hxn = 6,暗示了在不同扭矩下的第6阶谐波,暗示了不同的电流。可以代替查找表来额外地补偿由于温度变化而产生的影响。类似地,目前为止讨论的增量电感和互感以及表观电感可以分解为基波分量和谐波分量。下面是目前为止讨论的所有电感的一般化表示:到目前为止所讨论的表观和增量电感项的基波分量可以使用图10和11中所示类型的三轴表面通量图来获得,即,相应的d轴通量(λ
d )和q轴通量(λ
q )分量作为d轴和q轴电流( id和 iq)的函数的通量变化。表观和增量电感的谐波分量可以使用磁通量和电流之间的关系来获得,其相对于hxnθe的变化在图5和6中被示出。图5和图6示出了在不同负载下通量作为hxnθe的函数的变化,这意味着它们也是d轴和q轴电流(id和iq)的函数。
[0091]
从电力和机械功率关系,可以导出电机扭矩方程如下,其捕获空间谐波的影响。第一项给出平均扭矩,而第二项表示由空间谐波产生的扭矩波动:
本文所述的图1的控制器50的目的是获得马达扭矩(te)并且减小如方程(19)所述的扭矩波动分量。这可以通过控制如方程(20)中所述的电流来获得,如下所述。替代性地,控制器50可以被配置为:通过从图3的逻辑块63指令零,抑制图1的电机14固有的电流波动(,所述电流波动由于空间谐波和诸如停滞时间等的逆变器非线性而导致。控制器50可以可选地配置为处理特定的谐波或多个不同的谐波:因此在图4中描述了带宽划分电流调节器(即谐波补偿调节器(hc-reg)逻辑块36)的代表性设计。与电流和磁通量如何分解成如上方程(17)和(20)所示的基波分量和谐波分量类似,电流调节器也可以设计成控制基波分量和谐波分量:其中是同步参考系电流调节器,例如图4的逻辑块34,旨在控制基波分量;而 是谐波参考系控制器,例如带宽划分谐波补偿调节器31,其被设计成控制谐波分量,其中hxn再次可以是n阶谐波。
[0092] 于是,在上述公式(15)和(16)中描述的电压方程然后可以写成复杂矢量形式 ,如下:其中是从方程(11)和(12)获得的矢量形式的表观电感项。 是通过以下给出的增量电感矩阵:
反电动势项
ꢀꢀ
可以被有意忽略,因为它被视为图1的控制器50的干扰项,并且因此在控制器50中作为附加项被补偿。
[0093]
方程(22)可以变换到拉普拉斯域(或s域),并且在电流域
ꢀꢀ
中的电机14的对象表示可以定义为:在这里,是阻尼阻力,其被增加以改善系统的动态特性。基波分量控制器gc(s)被设计为控制阻尼对象g
p
(s),使得图1的实际电机14表现得像良好衰减的性能对象g
p
(s)一样。gc(s)可以定义为:增益k
pdq 和k
idq
可以被设定为实现近似极零相消(pole-zero cancellation),,其中是同步系电流调节器(synchronous frame current regulator)的带宽,并且 是采样频率。
[0094]
带宽可以线性变化也可以根据采样频率而变化,以保持系统(即,电机14)的高带宽和抗干扰特性。即,,其中可以在不理解由于角度位置θe引起的变化的情况下获得,因为配置为控制基波分量。 如公式(18)所示,电感项可以分解为基波分量和谐波分量。,其中,被修改为采样频率的函数,以保持高带宽和抗干扰特性。如参考方程(18)所讨论的,电感项可以分解为基波分量和谐波分量。
[0095]
继续此论述,所述同步参考系频率响应是具有带宽
ꢀꢀ
的近似一阶响应:
同步电流调节器可以旋转到特定谐波
ꢀꢀ
的谐波参考系中,其导致:于是,增益被设置如下,以试图实现近似极零相消,,其中是用于根据同步参考系控制器50来设置谐波参考系控制器的带宽的缩放值。因此,,其中可以在没有基波分量的情况下从方程(24)被获得,如参考方程(18)所讨论的。电感项可以分解为基波分量和谐波分量。,其中 根据采样频率而被修改以保持系统的高带宽和抗干扰特性。
[0096]
因此,方程(23)的有效解耦对象可以被定义为:该表达式导致谐波参考系频率响应,其是中心在 附近的带通系统响应:上述方程(24)的离散形式通过施加可以针对图4(逻辑块34)被实施。方程(26)的离散项在图4中被描述,其中频率校正项用于考虑对诸如控制器60的数字控制系统而言典型的离散误差和采样延迟,其可使用查找表来预先配置。(块52)代表采样周期。在替代性控制逻辑250l中,附加电流到通量转换查找表170和270被用于分别输出基波分量和谐波分量,即λ
dq
和λ
dqhxn
。图8的配置可使用上文参看图4描述的谐波电流调节器逻辑块36的替代配置136,如下文陈述。
[0097]
图8中的这样的增益配置允许高带宽和高干扰抑制特性,同时保持系统稳定性直
至低脉冲率,其中fe是与旋转速度成比例的同步频率,而“低脉冲率”意味着针对给定采样频率以高频率或高速度运行。而且,这种类型的增益配置理解通量的变化,从而导致高频分量的精确控制。
[0098]
因此,本文使用的带宽划分是一种将控制器与不同带宽和频率处理目标进行组合的方法,其允许整个控制系统实现高带宽和干扰抑制特性。作为示例,同步参考系电流调节器可以被配置为具有高带宽,并且它将通过实现平均扭矩来负责平均或基本电流指令。谐波参考系电流调节器可以被配置为具有如本文所述的划分带宽,并且负责跟踪旨在用于扭矩波动减小或音调注入或电流波动减小的高频脉动信号。这使得改进了多阶(谐波)的高频脉动信号的跟踪,而没有任何直流分量和相位滞后误差。
[0099]
在图8的示例性实施例中描述了带宽划分通量调节器的设计。来自上述方程(1)和(2)的电压方程可以使用来自方程(13)和(14)的电流和通量之间的关系以通量形式书写:这种方程写成复矢量形式
ꢀꢀ
,如下:定义时间常数,其中 转换到拉普拉斯域(或s域)导致通量域中的对象模型:基本磁通控制器或同步系磁通调节器可以数学地表示为或定义为:这样做实现近似一阶动态:
同步通量调节器可以旋转到特定谐波
ꢀꢀ
的谐波参考系中,其导致:其中是谐波磁通调节器的带宽,并被设置为,并且是用于根据同步参考系控制器设置谐波参考系控制器的带宽缩放值,并且其中和。
[0100]
谐波通量调节器通常用于注入小幅度的高频信号,并且
ꢀꢀ
通常对于这种情况足够小,并且如果需要可以忽略:方程(32)的有效解耦对象可被写为:这导致谐波参考系频率响应,其是中心在 附近的带通系统响应:用于同步通量调节器的上述方程(33)的离散形式通过施加可以针对图8被实现。同样,在图8中描述了方程(35)的离散形式,其中频率校正项用于考虑诸如控制器60的数字控制系统典型的离散误差和采样延迟,其可使用查找表来预先配置,其中是采样周期。
[0101]
在图9中描述了包括时间常数项的离散形式的方程(34)。在根据图8的通量域内而
不是图7的电流域中控制诸如图1的电机14的ac电机的一个明显优点在于,可以考虑导致更精确水平的控制的交叉耦合和饱和效应。
[0102]
在图7中,通过比较,谐波分量在通量域中被控制,而基波分量在电流域中被控制。由于考虑了谐波参考系通量的变化,所以该替代性控制方案保持为有效选择。
[0103]
返回简要参考图4,通过使用pi控制逻辑实现,谐波电流调节器可以由带宽(bw1、
…
、bwn)划分,例如在用于(n)个谐波分量中的每一个的一个子块36内,具有对应块44-n、46-n和48-n,如图所示。每个子块36、
…
、36-n的输出在节点n12处被求和,并在块56处被限幅,从而将谐波补偿电压分量( v
dq*hx
)提供给求和节点n3,如图2所示和如上所述。
[0104]
上述图5和6描述了对于给定的扭矩负载的通量幅度和相位的影响,给定的扭矩负载例如是100%的扭矩负载(图5)和50%的扭矩负载(图6)。在竖直轴上分别描绘了针对d轴通量和q轴通量贡献68和168的单位为韦伯 (wb)的磁链(flx-l)。以度(
°
)为单位的电角度(elec.ang.)被描绘在水平轴上。图5和6的比较揭示了,磁链根据电角度和扭矩负荷而变化。这使图1的电驱动系统11对本公开的有目的地注入的电流和相位敏感,并且同样涉及相位角度注入的构想的基于操作点的带宽划分的变化。
[0105]
选择性可听音调注入:如上所述,在一些应用中,例如图1所示的机动车辆10的电池电动车辆实施例,由于电机14的配置和电力线动力学,可能难以完全消除给定的谐波阶次,或者可能期望保持给定的谐波阶次。因此,在机械领域中,所描述的带宽划分方法使得能够引入可听音调,例如第1或第3阶谐波,以从在其它可能的更高阶谐波(例如第6或第12阶谐波)上发出的声音中分散用户。同样,引入音调可以补充电机14运行期间可能产生的其他谐波阶次。以这种方式,本教导不限于消除不期望的谐波,而是还可以或可替代地包括有目的地注入谐波以形成电驱动系统11的nvh特性。因此,除了或者替代降低噪声和消除扭矩和电流波动,可以执行音调注入。
[0106]
图7描述了控制逻辑150l,其可以用作图2的基于电流的方法的变型或扩展。即,代替在电流域中的处理,本教导可以应用于通量域中。如将理解的,通量域中的操作需要准确地知道电机14在其预期操作范围内的d轴和q轴通量特性。这种信息可以例如经由离线测试和校准来确定,然后记录在图1所示的控制器50的存储器(m)中。
[0107]
相对于图2,改进的基于通量域的控制逻辑150l包括电流到通量映射查找表70和170(
“”
)和谐波通量调节器逻辑块72(“hf-reg”),以及滤波器74(“filt”),例如带通滤波器或同步滤波器。查找表70针对给定的谐波补偿电流分量(i
dq*hx
)提供相应的指令谐波补偿磁通分量(λ
dq*hx
)。 在节点n13处从该值中减去来自带通滤波器74的实际或估计的谐波补偿通量分量(λ
dq
hxn),其差是通量误差信号(箭头λ
dq*hx, err
)。然后将该误差信号与当前旋转速度(ωe)一起作为输入提供给谐波通量调节器逻辑块72。
[0108]
使用离散控制拓扑在图7中更详细地示出了逻辑块72,该拓扑与图4所示的拓扑类似,除了图4的比例和积分增益块44和46之外。类似于在图4中示出的,频率校正块48提供作为旋转速度ωe,特定谐波(hx1)和时域参数(ts)的函数的校正值。除了上述积分器块(z-1
)54和采样间隔(ts)52,控制逻辑150l包括增益块75(“ω
b1”,
…
,“ω
bn”),其中ω
bn
=2πf
bn
(f
sw
)。在这里,ω
bn
是谐波通量调节器逻辑块72的带宽,以弧度/秒为单位,其中(n)再次适用于特定的谐波频率,如上文其他地方所述。 f
bn
是谐波磁通调节器的带宽(以赫兹为单位),并且f
sw
是tpim 20(图1和2)的开关频率,例如控制器50的采样频率。因此,带宽根据开
关频率而线性地变化或以其他方式变化。这种方法的优势在于,确保在不同的开关和采样频率下谐波电流调节的稳定性。因此,谐波补偿电流分量(vdq*hx)从限制块56输出到图2的节点n3。
[0109]
本教导有助于使其实现相关的控制方法,如本领域普通技术人员将容易理解的。在示例性实施例中,例如,图1的控制器50可评估上述启用条件以确定是否保证扭矩和电流波纹消除技术的实施。当满足启用条件时,控制器50可以识别要处理的特定谐波分量,例如第3阶、第6阶和/或第12阶的谐波分量。
[0110]
然后,控制器50根据旋转速度和马达扭矩确定所需的d轴和q轴电流指令以及消除电流和扭矩波动以及可能为所选谐波注入或引入可听音调所需的相位注入。作为这种方法的一部分,控制器50可以将谐波电流指令缩放为马达速度的函数,然后将各种谐波电流指令求和。控制器50在接合同步和谐波电流调节器36 (图2)的带宽划分之后最终产生用于激励电机14的所需相电压指令。
[0111]
离线地,本方法可以包括确定用于填充图2、3、4和7的查找表的所需值。例如,在测试台或实验室设置上,可以确定消除电机14的选定谐波的扭矩波动所需的电流指令和相位。作为这种努力的一部分,可以对蕴含的对象建模和特征化,其中在这种情况下,对象包括电机14和耦合的负载。nvh分析可以在电机14的不同扭矩负载和旋转速度下执行。类似的方法可以用于选择谐波的音调注入。此后,操作中的控制器50实时产生谐波电流指令和相位指令,以消除扭矩波动和电流波动,以及降低图1的电驱动系统11中的声学噪声。
[0112]
在本教导的非限制性示例性应用中,用户可以单独地配置两个谐波阶次的处理,例如hx1 = 6和hx2 = 12,并且针对相应的扭矩和速度操作区域选择性地启用用于hx1和hx2的控制逻辑50l或150l。对于谐波阶次hx1,针对给定的扭矩和速度操作区域,通过配置电流幅度和相位阻塞,可以消除扭矩波动。图3的零指令产生逻辑块63可以被配置成消除特定hx1扭矩和速度操作区域的电流波动。通过对配置区域指令零,控制器通过指令补偿电压(即 v
qhx
)试图针对特定谐波强制对象的电流为零。同时,hx2的幅值和相位区块可经配置以注入声学音调以分散谐波阶次hx1的低频内容。替代性地,可以配置谐波阶次hx1和hx2的处理,以消除用于选择的扭矩和速度区域的扭矩和电流波动。
[0113]
图12和13分别示出了对于基线加速度的可能的振动减小和声学噪声减小。水平轴表示以每分钟转数(rpm
avg
)为单位的电机14的平均速度,竖直轴表示分贝(db)。迹线t1形成了在缺少本教导的情况下对于这种代表性加速度的基线性能,其中迹线t2表示在相同条件下使用所公开的谐波划分策略的性能。本发明的典型益处是在较高旋转速度(例如在该示例情况下,在高于约1000rpm)下振动和噪声的减小,所述旋转速度对应于使用常规方法在谐波意义上通常不能解决的速度范围。
[0114]
尽管本教导被表示为对应的控制逻辑和组成逻辑块,但是本领域技术人员将在本文认识到用于控制旋转电机14的操作的基础方法。因此,可以对图1的指令100进行编码,以使得由控制器50的处理器p执行指令100使控制器50经由图2的谐波补偿调节器31接收电机14的指令扭矩()和旋转速度(ωe),然后响应于该组启用条件(箭头cc
enbl
)经由谐波补偿调节器31使用指令扭矩()和旋转速度(ωe)针对一个或多个预定谐波阶次计算dq谐波补
偿电流(()和电压()。如上所述,谐波补偿电流电压被配置为以预定的谐波阶次消除扭矩和电流波动。
[0115]
该方法可以包括将dq谐波补偿电流(()和电压()分别添加到dq电流和电压指令(和),以产生调整后的dq电流指令()和调整后的dq电压指令()。 此后,方法可以包括使用调整后的dq电流和电压指令(和)来控制图1的电机14的操作。
[0116]
这样的方法可以处理多个谐波阶次,在这种情况下,图2的带宽划分谐波补偿调节器31可以配置为将针对多个谐波阶次中的每一个的dq谐波补偿电流(加在一起,并且同样地将针对多个谐波阶次中的每一个的dq谐波补偿电压(加在一起, 以分别产生谐波补偿电流和电压()和()。
[0117]
该方法的实施例可以包括经由图2中描绘的控制器50的扭矩到电流逻辑块30根据指令扭矩(),转速(ωe)和dc母线电压电平(v
dc
)产生dq电流指令()。如上所述,逻辑块30可以被实现为由指令扭矩、旋转速度和dc总线电压电平索引或引用的查找表。
[0118]
该方法的其它方面可以包括从经调节的dq电流指令(中减去电机14的实际dq电流(i
dq
)以得到dq电流误差值(i
dq,err
),使用dq电流误差值(i
dq,err
)通过谐波补偿调节器31产生经调节的dq电压指令(),将经调节的dq电压指令()转换为相电压指令(v
*abc
),以及将相电压指令(v
*abc
)提供给图1和2的tpim 20,从而激励电机14。
[0119]
在图2所示的实施例中,该方法可以包括:经由ff hc-gen逻辑块32确定并输出dq谐波补偿电流();经由hc-reg逻辑块36确定并输出dq谐波补偿电压();以及通过如图3所示的ff hc-gen逻辑块32的缩放逻辑块60,
…
,60-n使dq谐波补偿电流()斜变。该方法可能需要根据指令扭矩和旋转速度,通过空块(null block )有选择地将单独的d轴和q轴谐波补偿电流(i
dhx1
,
ꢀ…
, i
dhxn
和i
qhx1
,
…
, i
qhxn
)归零。
[0120]
如图4所示,图2的hc-reg逻辑块36可以包括用于谐波阶次的每个相应谐波阶次的多个分离的控制回路,其中每个回路具有可选的比例和积分增益块44和46以及频率校正块48。经由hc-reg逻辑块36确定并输出dq谐波补偿电压()可以包括:为(n)个谐波阶次中的每一个计算各自的特定于谐波的dq谐波补偿电压;然后将各自的特定于谐波的dq谐波补偿电压(v
dqhx
)加在一起以由此产生指令的dq谐波补偿电压()。
[0121]
同样如上所述,可以使用图2的谐波补偿调节器31以预定的谐波阶次注入可听音调。在替代实施例中,调节器31也在磁通量域而不是电流域中操作。在通量域中,该方法可以适于包括:将来自图7的ff hc-gen逻辑块32的dq谐波补偿电流()转换成dq谐波补
偿磁通量;计算dq谐波补偿磁通量误差值;传输dq谐波补偿磁通量误差值到图7的hf-reg逻辑块72;以及然后使用dq谐波补偿磁通误差值经由hc-reg逻辑块72确定并输出dq谐波补偿电压,例如,借助查找表、计算或其他实现。
[0122]
详细描述和附图或图支持和描述本教导,但是本教导的范围仅由权利要求限定。虽然已经详细描述了用于执行本教导的一些最佳模式和其它实施例,但是存在用于实践在所附权利要求中限定的本教导的各种替代设计和实施例。此外,本公开明确地包括上文和下文呈现的元件和特征的组合和子组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1