AGV专用驱动减速电机装置的制作方法
agv专用驱动减速电机装置
技术领域
1.本技术涉及自动化搬运与电机驱动领域,具体涉及一种agv专用驱动减速电机装置。
背景技术:
2.自动巡航电动车(automated guided vehicle-agv)是一种自动化物料搬运设备,是一种无人驾驶搬运车,是智能型移动机器人的一种,能够沿预先设定的路径行驶,是现代工业自动化物流系统如计算机集成制造系统中的关键设备之一。它可以按照上位机下达的指令,依照车载传感器确定位置信息,并根据事先设计的程序,沿着规定的路线自动行驶,或者在指定位置停靠,以完成一系列作业功能。它具有自动化程度高、应用灵活、安全可靠、无人操作、施工简单及维修方便等诸多优点,因而广泛应用于汽车制造业、烟草行业、工程机械行业、机场等物资运输场所。近年来,随着科学技术的飞速发展,自动化程度越来越高,的应用范围不断扩大随着经济的快速发展,劳动力的不足逐渐凸显。agv在工厂、港口和物流仓库等劳动力需求多的地方受到极大的欢迎,agv在节省劳动力的同时具有无污染、灵活便捷、效率高等优势,已成为现代化工厂中不可或缺的一员。为完成工厂内货物搬运等运输功能,特别在宽调速范围实现多种路径运行,需通过agv两车轮的速度差完成,从而对专用驱动减速电机提出较的高动态性能。因此agv与其他设备对接精度的稳定性对作业成功有着至关重要的影响。目前,在提高对接精度方面大多数研究是通过增加机械辅助装置、二次减速、辅以激光雷达或视觉等高精度传感器形成闭环控制等,但增加机械装置会使agv结构变得复杂且成本增高,二次减速会影响agv整体工作效率,采用激光雷达与视觉传感器意味着高成本与高支出。因此对agv专用驱动减速电机的准停精度设计非常必要,经过分析,确定了三个准停影响因素,分别是rfid定位识别误差、负载改变、车轮打滑,其中负载变化为主要影响因素,负载改变会造成agv自身惯性的变化,并最终影响agv的停车精度。通过agv专用驱动减速电机负载监测控制能够极大提高稳定性、准确性与停车精度。
3.如图1所示,为现有技术的正负电源过流保护电路,当发生短路冲击时,三极管t6与电阻rs2形成恒流源,可以把电流限制在设计的范围内,在比较电路发挥作用前的微小时间内使短路电流不至于继续增大,从而对电路形成双重保障,然而电路整体涉及元器件众多,三端器件连接紧凑,不利于集成,也降低了抗干扰能力,响应速度慢,精度低。
4.如图2所示,为现有技术的过流保护电路,当mcu触发过流保护时,输出高电平,控制信号电路三极管q5开启,三极管q3开启,时触发三极管q4开启锁定逻辑,三极管q2开启,三极管q1关闭,场效应晶体管m1关闭,关断负载电路。逻辑自锁电路在mcu电路掉电状态下保持场效应晶体管m1关闭状态直到电路断电,排除故障并重启才能恢复。然而,整体电路虽然结构简单,逻辑连贯,但是大量采用三极管,整体功耗较高,灵敏度较低。
5.如图3所示,为现有技术的驱动技术,端口ina、端口inb、端口pwm1共同控制电机,电路整体利用芯片完成脉冲信号的设计,外围辅助电路简单,成本低,但驱动能力差,应用能力差,。
6.针对上述现有技术,驱动减速电机存在以下问题:
7.1.过流保护电路速度慢,精度低。
8.2.驱动能力差,灵敏度低。
技术实现要素:
9.针对上述技术问题,本技术提出agv专用驱动减速电机装置,包括电流检测电路,过流保护电路,主驱动电路。
10.电流检测电路在agv专用驱动减速电机系统中,能够采集实时电流信号,配合后级电路能够实现对控制器进行过流保护和堵转保护。输入信号通过采样电阻r4进行采样,再经过三极管q8进行放大,经过整流二极管d1和整流二极管d2,再经过电感l1和电阻r5、电阻r6、电阻r9并联完成电流的检测,通过电感能够有效减少后级电路串扰,通过二极管d5和二极管d6稳定输入信号,电容c5起到滤波作用,减小输入干扰,通过场效应晶体管q13的栅极对信号进行反馈,通过三极管q7进行反馈调节,经过电感l1的信号再经过与正常情况下的保护电流值进行比较,控制三极管q7的导通与截止,如过大则实施保护动作,能够实现输入信号与反馈信号快速响应监测。
11.过流保护电路,能够实现保护功能,可确保软件保护没动作的情况下驱动器不会因过流而烧坏,为更好的对驱动板实施保护,采用双重电流保护方式,软件保护和硬件保护。软件保护是通过采样检测电流的大小,与程序中预先设定相应的保护电流值进行比较,如过大则实施保护动作。硬件保护是通过三组场效应晶体管q5和场效应晶体管q6、场效应晶体管q12和场效应晶体管q13、场效应晶体管q18和场效应晶体管q19进行输入信号比较,信号电位过大,控制超快反应场效应晶体管q14、场效应晶体管q15关断输出,实施保护,信号首先进入场效应晶体管q12的栅极,再流过场效应晶体管q13的源极、场效应晶体管q5的漏极、场效应晶体管q18的源极、场效应晶体管q19的栅极进行信号的比较,信号正常输出给下一级,电流过大则通过场效应晶体管q19和场效应晶体管q6关断输出,二极管d4实现钳位输出信号的作用。正常输出控制信号给驱动电路进行控制。
12.主驱动电路,作为控制信号与场效应晶体管之间的连接桥梁,输出级电路为场效应晶体管构成的对应驱动电路。由于直流侧电压不是很高,所以没有对其采用隔离电路。由于agv专用驱动减速电机的驱动器的设计要求,要留有足够的裕量,因此控制信号通过场效应晶体管q16和输入到该级后通过三个大功率场效应晶体管q9、场效应晶体管q10、场效应晶体管q11提供持续稳定的功率输出;输入信号还经过电容c3与场效应晶体管q3、场效应晶体管q4及场效应晶体管q9相连,当输入信号关闭时,场效应晶体管q16和场效应晶体管q9将不导通,对电容c3进行充电。而当输入的的电平状态有效时,场效应晶体管q16、场效应晶体管q9开通,此时电容再自行进行放电,保证场效应晶体管的可靠开通与关断。如采用p型沟道的场效应晶体管将不存在没有电容开关管而不能正常导通的情况,但同一参数规格下的p沟道场效应晶体管相比n沟道场效应晶体管的价格要更高、导通电阻也相对更高些。则相应的开关损耗和发热量将随之增大,且种类也较少。采用带电容的驱动电路,成本低廉的同时其运行也更加稳定。场效应晶体管q3、场效应晶体管q4提供稳定的控制与关断信号,三极管q1、三极管q2将控制信号与输出功率信号有效进行分离,防止后级信号反向串扰,通过电阻r8,电容c4,二极管d3进行续流输出,解决前级电路保护后输出电路不能响应的问题。实
现稳定控制驱动减速电机。
13.(三)有益效果
14.本技术提出agv专用驱动减速电机装置,首先,利用相电流采样检测,响应快,准确度高。其次,通过过流保护实时快速响应,能够实现精准控制。最后,采用高效驱动输出电路稳定输出功率,提高效率,能够精确调控驱动减速电机。
附图说明
15.图1为为现有技术的正负电源过流保护电路。
16.图2所示为现有技术的过流保护电路。
17.图3所示为现有技术的驱动技术。
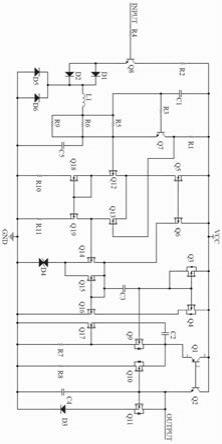
18.图4为本技术的电路原理图。
具体实施方式
19.下面结合实施例对本发明做进一步说明。
20.如图4所示,为本技术的agv专用驱动减速电机装置,包括电流检测电路,过流保护电路,主驱动电路。
21.电流检测电路在agv专用驱动减速电机系统中,能够采集实时电流信号,配合后级电路能够实现对控制器进行过流保护和堵转保护。输入信号通过采样电阻r4进行采样,再经过三极管q8进行放大,经过整流二极管d1和整流二极管d2,再经过电感l1和电阻r5、电阻r6、电阻r9并联完成电流的检测,通过电感能够有效减少后级电路串扰,通过二极管d5和二极管d6稳定输入信号,电容c5起到滤波作用,减小输入干扰,通过场效应晶体管q13的栅极对信号进行反馈,通过三极管q7进行反馈调节,经过电感l1的信号再经过与正常情况下的保护电流值进行比较,控制三极管q7的导通与截止,如过大则实施保护动作,能够实现输入信号与反馈信号快速响应监测。
22.具体而言,所述电流检测电路中电阻r4的一端与输入端input连接,另一端与三极管q8的基极连接,电阻r2的一端与三极管q8的集电极连接,另一端与高电平vcc连接,电感l1的一端分别与二极管d1的负极、二极管d2的负极、二极管d5的负极、二极管d6的负极连接,另一端分别与电阻r3的一端、电阻r5的一端、电阻r6的一端、电阻r9的一端、电容c1的一端连接,电容c1的另一端与高电平vcc连接,电阻r3的与三极管q7的基极连接,电阻r5的另一端分别与电阻r6的另一端、电阻r9的另一端、电容c5的一端、三极管q7的发射极连接,电容c5的另一端接地,电阻r1的一端与三极管q7的集电极连接,另一端与高电平vcc连接,三极管q8的发射极分别与二极管d1的正极、二极管d2的正极连接,二极管d5的正极分别与二极管d6的正极、地线连接。
23.过流保护电路,能够实现保护功能,可确保软件保护没动作的情况下驱动器不会因过流而烧坏,为更好的对驱动板实施保护,采用双重电流保护方式,软件保护和硬件保护。软件保护是通过采样检测电流的大小,与程序中预先设定相应的保护电流值进行比较,如过大则实施保护动作。硬件保护是通过三组场效应晶体管q5和场效应晶体管q6、场效应晶体管q12和场效应晶体管q13、场效应晶体管q18和场效应晶体管q19进行输入信号比较,信号电位过大,控制超快反应场效应晶体管q14、场效应晶体管q15关断输出,实施保护,信
号首先进入场效应晶体管q12的栅极,再流过场效应晶体管q13的源极、场效应晶体管q5的漏极、场效应晶体管q18的源极、场效应晶体管q19的栅极进行信号的比较,信号正常输出给下一级,电流过大则通过场效应晶体管q19和场效应晶体管q6关断输出,二极管d4实现钳位输出信号的作用。正常输出控制信号给驱动电路进行控制。
24.具体而言,所述过流保护电路中场效应晶体管q5的栅极与场效应晶体管q6的栅极连接,场效应晶体管q5的源端与高电平vcc连接,场效应晶体管q6的源端与高电平vcc连接,场效应晶体管q5的漏端与场效应晶体管q12的源端、场效应晶体管q13的源端连接,场效应晶体管q6的漏端与场效应晶体管q14的漏端、场效应晶体管q15的漏端端连接,场效应晶体管q12的栅极与三极管q7的发射极连接,场效应晶体管q13的栅极与三极管q7的集电极连接,场效应晶体管q12的漏端分别与场效应晶体管q18的漏端、场效应晶体管q18的栅极、场效应晶体管q19的栅极连接,场效应晶体管q13的漏端分别与场效应晶体管q19的漏端、场效应晶体管q14的栅极连接,电阻r10的一端与场效应晶体管q18的源端连接,另一端接地,电阻r11的一端与场效应晶体管q19的源端连接,另一端接地,双向二极管d4的一端分别与场效应晶体管q14的源端、场效应晶体管q15的源端连接,另一端接地。
25.主驱动电路,作为控制信号与场效应晶体管之间的连接桥梁,输出级电路为场效应晶体管构成的对应驱动电路。由于直流侧电压不是很高,所以没有对其采用隔离电路。由于agv专用驱动减速电机的驱动器的设计要求,要留有足够的裕量,因此控制信号通过场效应晶体管q16和输入到该级后通过三个大功率场效应晶体管q9、场效应晶体管q10、场效应晶体管q11提供持续稳定的功率输出;输入信号还经过电容c3与场效应晶体管q3、场效应晶体管q4及场效应晶体管q9相连,当输入信号关闭时,场效应晶体管q16和场效应晶体管q9将不导通,对电容c3进行充电。而当输入的的电平状态有效时,场效应晶体管q16、场效应晶体管q9开通,此时电容再自行进行放电,保证场效应晶体管的可靠开通与关断。如采用p型沟道的场效应晶体管将不存在没有电容开关管而不能正常导通的情况,但同一参数规格下的p沟道场效应晶体管相比n沟道场效应晶体管的价格要更高、导通电阻也相对更高些。则相应的开关损耗和发热量将随之增大,且种类也较少。采用带电容的驱动电路,成本低廉的同时其运行也更加稳定。场效应晶体管q3、场效应晶体管q4提供稳定的控制与关断信号,三极管q1、三极管q2将控制信号与输出功率信号有效进行分离,防止后级信号反向串扰,通过电阻r8,电容c4,二极管d3进行续流输出,解决前级电路保护后输出电路不能响应的问题。实现稳定控制驱动减速电机。
26.具体而言,所述主驱动电路中场效应晶体管q3的栅极与场效应晶体管q4的栅极连接,场效应晶体管q3的源端与高电平vcc连接,场效应晶体管q4的源端与高电平vcc连接,场效应晶体管q3的漏端分别与场效应晶体管q4的栅极、场效应晶体管q9的栅极、电容c3的一端连接,电容c3的另一端分别与场效应晶体管q15的漏端、场效应晶体管q15的栅极、场效应晶体管q16的栅极连接,场效应晶体管q4的漏端与场效应晶体管q16的漏端连接,场效应晶体管q16的源端接地,三极管q1的集电极与高电平vcc连接,三极管q2的集电极与高电平vcc连接,场效应晶体管q1的基极与三极管q2的基极连接,三极管q1的发射极分别与电容c2的一端、场效应晶体管q9的漏端、场效应晶体管q10的漏端连接,电容c2的另一端与场效应晶体管q17的漏端连接,电阻r7的一端分别与场效应晶体管q9的源端、场效应晶体管q17的栅极连接,另一端接地,电阻r8的一端与场效应晶体管q10的源端连接,另一端接地,场效应晶
体管q17的源端接地,三极管q2的发射极分别与电容c4的一端、场效应晶体管q10的栅极、场效应晶体管q11的栅极、场效应晶体管q11的漏端连接,电容c4的另一端接地,二极管d3的正极与场效应晶体管q11的源端连接,负极接地,输出端output与三极管q2的发射极连接。
27.以上对本发明的一个实施例进行了详细说明,但所述内容仅为本发明的较佳实施例,不能被认为用于限定本发明的实施范围。凡依本发明申请范围所作的均等变化与改进等,均应仍归属于本发明的专利涵盖范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1