电机主从混沌同步控制方法及系统与流程
1.本发明涉及机械传动控制技术领域,尤其是指一种电机主从混沌同步控制方法及系统。
背景技术:
2.工业控制系统通常处于不间断运行的状态,对于控制系统中的直流电机的负担相当大,其耗损相当快速,当电机发生故障时,会导致控制系统停止动作,进而影响其工作效率。因此如何实时且正确地对电机故障进行诊断是判断电机控制系统的运行状况以及提高控制系统效率的前提。
3.目前实现电机故障诊断多采用混沌同步控制系统,但是现有技术的混沌同步控制系统需要经过后处理才能判别故障,因此其存在故障诊断时间长以及诊断准确率低的缺陷。
技术实现要素:
4.为此,本发明所要解决的技术问题在于克服现有技术中混沌同步控制系统存在的故障诊断时间长以及诊断准确率低的缺陷。
5.为解决上述技术问题,本发明提供一种电机主从混沌同步控制方法,包括:
6.构建电机的主从混沌同步控制模型,所述主从混沌同步控制模型包括主单元和从单元;
7.定义动态误差系数以使所述从单元追踪所述主单元实现自我同步的动态误差,并根据所述动态误差系数构建动态误差模型;
8.定义分数阶,所述从单元利用所述分数阶构建自我同步误差模型;
9.将所述自我同步误差模型用于电机故障诊断,提取所述电机的状态特征绘制其动态误差轨迹,根据所述动态误差轨迹诊断所述电机的故障信息。
10.在本发明的一个实施例中,所述主单元和所述从单元的表达式如下:
[0011][0012][0013]
其中,x∈r
n
和y∈r
n
为状态矢量,a为n
×
n的单元矩阵,f(x)和f(y)为非线性的矢量,u为非线性控制项。
[0014]
在本发明的一个实施例中,a为n
×
n的单元矩阵,当n=3时,以chen
‑
lee混沌为例,x∈r
n
,y∈r
n
,x=[x1,x2,x3]
t
,y=[y1,y2,y3]
t
,u=[u1,u2,u3]
t
,其主单元a
m
与从单元a
s
为一个3x3的单元,其中主单元a
m
和从单元a
s
的表达式如下:
[0015][0016][0017]
其中,参数a,b,c满足条件为:a>0,b>0,c>0,and 0<a<
‑
(b+c)。
[0018]
在本发明的一个实施例中,定义动态误差系数以使所述从单元追踪所述主单元实现自我同步的动态误差,并根据所述动态误差系数构建动态误差模型包括:
[0019]
使非线性控制项u1=u2=u3=0,定义动态误差系数e=[e1,e2,e3]
t
,并根据动态误差系数构建动态误差模型如下:
[0020][0021]
其中,e1=x1‑
y1,e2=x2‑
y2,e3=x3‑
y3。
[0022]
在本发明的一个实施例中,所述动态误差模型的表达式如下:
[0023][0024]
其中,参数a,b,c满足条件为:a>0,b>0,c>0,and 0<a<
‑
(b+c)。
[0025]
在本发明的一个实施例中,定义分数阶包括:
[0026]
所述分数阶的表达式为:其中,e为动态误差系数,m为任意实数,α为选择所需的现象。
[0027]
在本发明的一个实施例中,所述α的绝对值|α|满足条件为:0.00<|α|≤0.20。
[0028]
在本发明的一个实施例中,所述从单元利用所述分数阶构建自我同步误差模型包括:
[0029]
所述从单元利用所述分数阶构建自我同步误差模型的过程表达式如下:
[0030][0031]
其中,γ(
·
)为gamma函数,q=(1
‑
α)是为了满足0<q<1,参数a',b',c'为非零常数,其满足以下条件:
[0032][0033]
0<a'<
‑
(b'+c')。
[0034]
在本发明的一个实施例中,为了实现自我同步误差,定义φ1[i],φ2[i],φ3[i]的表达式如下:
[0035][0036]
其中,动态误差系数为e1[i]=x[i]
‑
y[i],e2[i]=x[i+1]
‑
y[i+1],e3[i]=x[i+2]
‑
y[i+2],i=1,2,3,...,n
‑
2。
[0037]
此外,本发明还提供一种电机主从混沌同步控制系统,包括:
[0038]
混沌同步控制模型构建模块,所述混沌同步控制模型构建模块用于构建电机的主从混沌同步控制模型,所述主从混沌同步控制模型包括主单元和从单元;
[0039]
动态误差模型构建模块,所述动态误差模型构建模块用于构建模块定义动态误差系数以使所述从单元追踪所述主单元实现自我同步的动态误差,并根据所述动态误差系数构建动态误差模型;
[0040]
自我同步误差模型构建模块,所述自我同步误差模型构建模块用于定义分数阶,所述从单元利用所述分数阶构建自我同步误差模型;
[0041]
电机故障诊断模块,所述电机故障诊断模块用于将所述自我同步误差模型用于电机故障诊断,提取所述电机的状态特征绘制其动态误差轨迹,根据所述动态误差轨迹诊断所述电机的故障信息。
[0042]
本发明的上述技术方案相比现有技术具有以下优点:
[0043]
本发明主从混沌同步控制模型中的从单元利用分数阶构建自我同步误差模型,利用自我同步误差模型绘制其动态误差轨迹,根据动态误差轨迹诊断电机的故障信息,其具有故障诊断时间短以及诊断准确率高的优点,易于推广应用。
附图说明
[0044]
为了使本发明的内容更容易被清楚的理解,下面根据本发明的具体实施例并结合附图,对本发明作进一步详细的说明。
[0045]
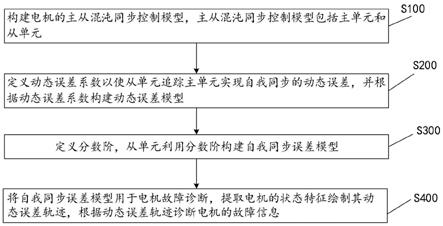
图1是本发明实施例一中电机主从混沌同步控制方法的流程示意图。
[0046]
图2是本发明实施例二中电机主从混沌同步控制系统的结构示意图。
[0047]
附图标记说明:10、混沌同步控制模型构建模块;20、动态误差模型构建模块;30、自我同步误差模型构建模块;40、电机故障诊断模块。
具体实施方式
[0048]
下面结合附图和具体实施例对本发明作进一步说明,以使本领域的技术人员可以更好地理解本发明并能予以实施,但所举实施例不作为对本发明的限定。
[0049]
实施例一
[0050]
下面先对本发明实施例一公开的一种电机主从混沌同步控制方法进行详细的阐述。
[0051]
请参阅图1所示,本实施例提供一种电机主从混沌同步控制方法,包括以下步骤:
[0052]
s100:构建电机的主从混沌同步控制模型,主从混沌同步控制模型包括主单元和从单元。
[0053]
s200:定义动态误差系数以使从单元追踪主单元实现自我同步的动态误差,并根据动态误差系数构建动态误差模型。
[0054]
s300:定义分数阶,从单元利用分数阶构建自我同步误差模型。
[0055]
s400:将自我同步误差模型用于电机故障诊断,提取电机的状态特征绘制其动态误差轨迹,根据动态误差轨迹诊断电机的故障信息。
[0056]
具体的,首先构建电机的主从混沌同步控制模型,其模型包括主单元和从单元,主单元和从单元分别由式(1)和式(2)表示如下:
[0057][0058][0059]
其中,x∈r
n
和y∈r
n
为状态矢量,a为一个n
×
n的矩阵,f(x)和f(y)为非线性的矢量,u为一个非线性控制项。
[0060]
为了实现信号处理之应用,选用n=3的非线性混沌系统,以chen
‑
lee混沌系统为例,x∈r
n
,y∈r
n
,其中x=[x1,x2,x3]
t
,y=[y1,y2,y3]
t
,u=[u1,u2,u3]
t
,其主单元a
m
与从单元a
s
为一个3x3的矩阵,其分别由式(3)和式(4)表示如下:
[0061][0062][0063]
其具有良好的对称性,为了使从单元追踪主单元实现自我同步的动态误差,可以
使控制项u1=u2=u3=0,定义动态误差系数e=[e1,e2,e3]
t
,并根据动态误差系数构建动态误差模型如下:
[0064][0065]
其中,e1=x1‑
y1,e2=x2‑
y2,e3=x3‑
y3。
[0066]
上述式(5)经整理后可得式(6):
[0067][0068]
根据现有结论,式(4)产生混沌吸引子,其参数a,b,c需满足以下条件:
[0069]
a>0,b>0,c>0,and 0<a<
‑
(b+c)
ꢀꢀ
(7)
[0070]
根据gr
ü
nwald
‑
letnikov定理,分数阶的定义可以表示为式(8):
[0071][0072]
其中e为动态误差系数,m为任意实数,α为选择所需的现象,α的绝对值|α|满足以下两个规则:
[0073]
0.00<|α|≤0.20:用于定量等差数值和比例应用;
[0074]
0.00<|α|≤0.20:用于控制非等差数值和分类应用。
[0075]
为了用分数阶表示,式(4)可以藉由分数阶导数整理为式(9):
[0076][0077]
其中q=(1
‑
α)是为了满足0<q<1,γ(
·
)为gamma函数,为了产生混沌吸引子,各参数须满足式(10):
[0078][0079]
0<a'<
‑
(b'+c')
ꢀꢀ
(10)
[0080]
其中,参数a',b',c'为非零常数,相位轨迹展示了分数阶为q时的动态行为。
[0081]
为了实现自我同步误差,定义φ1[i],φ2[i],φ3[i]的表达式如下:
[0082][0083]
其中,动态误差系数为e1[i]=x[i]
‑
y[i],e2[i]=x[i+1]
‑
y[i+1],e3[i]=x[i+2]
‑
y[i+2],i=1,2,3,...,n
‑
2。
[0084]
本发明主从混沌同步控制模型中的从单元利用分数阶构建自我同步误差模型,利用自我同步误差模型绘制其动态误差轨迹,根据动态误差轨迹诊断电机的故障信息,其具有故障诊断时间短以及诊断准确率高的优点,利于未来应用于实时监控上,并可应用在在线实时分析系统辅助工具中。
[0085]
实施例二
[0086]
下面对本发明实施例二公开的一种电机主从混沌同步控制系统进行介绍,下文描述的一种电机主从混沌同步控制系统与上文描述的一种电机主从混沌同步控制方法可相互对应参照。
[0087]
请参阅图2所示,本发明公开了一种电机主从混沌同步控制系统,包括:
[0088]
混沌同步控制模型构建模块10,混沌同步控制模型构建模块10用于构建电机的主从混沌同步控制模型,主从混沌同步控制模型包括主单元和从单元。
[0089]
动态误差模型构建模块20,动态误差模型构建模块20用于构建模块定义动态误差系数以使从单元追踪主单元实现自我同步的动态误差,并根据动态误差系数构建动态误差模型。
[0090]
自我同步误差模型构建模块30,自我同步误差模型构建模块30用于定义分数阶,从单元利用分数阶构建自我同步误差模型。
[0091]
电机故障诊断模块40,电机故障诊断模块40用于将自我同步误差模型用于电机故障诊断,提取电机的状态特征绘制其动态误差轨迹,根据动态误差轨迹诊断电机的故障信息。
[0092]
本实施例的电机主从混沌同步控制系统用于实现前述的电机主从混沌同步控制方法,因此该系统的具体实施方式可见前文中的电机主从混沌同步控制方法的实施例部分,所以,其具体实施方式可以参照相应的各个部分实施例的描述,在此不再展开介绍。
[0093]
另外,由于本实施例的电机主从混沌同步控制系统用于实现前述的电机主从混沌同步控制方法,因此其作用与上述方法的作用相对应,这里不再赘述。
[0094]
本领域内的技术人员应明白,本技术的实施例可提供为方法、系统、或计算机程序产品。因此,本技术可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本技术可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器、cd
‑
rom、光学存储器等)上实施的计算机程序产品的形式。
[0095]
本技术是参照根据本技术实施例的方法、设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序
指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
[0096]
这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。
[0097]
这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
[0098]
显然,上述实施例仅仅是为清楚地说明所作的举例,并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式变化或变动。这里无需也无法对所有的实施方式予以穷举。而由此所引申出的显而易见的变化或变动仍处于本发明创造的保护范围之中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1