一种燃料电池系统DCDC变换器控制方法与流程
一种燃料电池系统dcdc变换器控制方法
技术领域
1.本发明属于机械技术领域,特别是一种燃料电池系统dcdc变换器控制方法。
背景技术:
2.氢质子交换膜燃料电池因其效率高、无污染、运行温度低、低噪声等优点而被广泛应用于交通运输领域,尤其是公交车、物流车、重型卡车等。车载燃料电池系统输出功率必须满足整车动力系统功率需求,而车辆在城市道路工况行驶时,必然面临频繁启停等状态,那么燃料电池系统平均输出功率较低。燃料电池堆是通过dcdc变换器与动力系统连接的,当燃料电池系统平均输出功率较低时,燃料电池堆的平均输出功率也较低,dcdc变换器容易进入断流模式。当燃料电池系统执行停机吹扫过程时,燃料电池堆输出电流也较低,dcdc变换器也进入断流模式。当燃料电池系统进入间歇运转模式时,燃料电池堆输出电流也较低,dcdc变换器也进入断流模式。
3.当dcdc变换器进入断流模式时,dcdc变换器输入电流低,通过dcdc变换器输入端电流传感器测量的输入电流也容易产生偏差。具体来说,dcdc变换器输入端电流传感器测量的输入电流范围可达600安培,并且输入端电流传感器测量电流精度仅为1%(等效电流测量精度为
±
6安培),而断流模式下dcdc变换器输入电流可能只有几安培,实际dcdc变换器输入电流有可能完全被传感器测量精度和噪声而淹没,因此在断流模式下,dcdc变换器输入电流控制精度很低且容易大幅波动。当燃料电池堆输出电流很低时,燃料电池堆输出电压接近于开路电压,此时燃料电池堆催化剂寿命快速衰减,加上燃料电池堆输出电流控制精度低,导致燃料电池容易形成循环波动电压,加速燃料电池堆催化剂寿命衰减过程。
4.针对上述问,提出了一种燃料电池系统dcdc变换器控制方法,提高断流模式下dcdc变换器输入电流测量精度。
技术实现要素:
5.本发明的目的是针对现有的技术存在上述问题,提出了一种燃料电池系统dcdc变换器控制方法,具有提高断流模式下dcdc变换器输入电流测量精度等优点。
6.本发明的目的可通过下列技术方案来实现:一种燃料电池系统dcdc变换器控制方法,其特征在于,包括以下步骤:
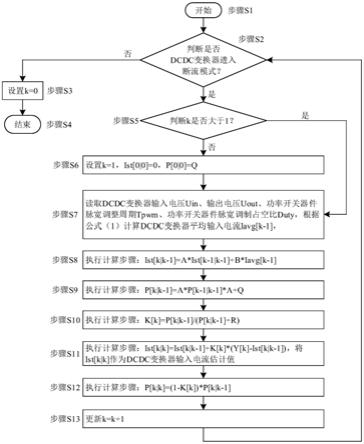
7.步骤s1:控制方法流程开始,进入步骤s2;
8.步骤s2:判断是否dcdc变换器进入断流模式;如果是,则进入步骤s5;如果否,则进入步骤s3;
9.步骤s3:设置k=0,进入步骤s4;
10.步骤s4:控制方法流程结束;
11.步骤s5:判断k是否大于1;如果是,则进入步骤s7;如果否,则进入步骤s6;
12.步骤s6:设置k=1,ist[0|0]=0,p[0|0]=q,进入步骤s7;
[0013]
步骤s7:读取dcdc变换器输入电压uin、输出电压uout、功率开关器件脉宽调整周
期tpwm、功率开关器件脉宽调制占空比duty,根据公式1计算dcdc变换器平均输入电流iavg[k
‑
1],进入步骤s8;
[0014]
步骤s8:执行计算步骤:ist[k|k
‑
1]=a*ist[k
‑
1|k
‑
1]+b*iavg[k
‑
1],进入步骤s9;
[0015]
步骤s9:执行计算步骤:p[k|k
‑
1]=a*p[k
‑
1|k
‑
1]*a+q,进入步骤s10;
[0016]
步骤s10:执行计算步骤:k[k]=p[k|k
‑
1]/(p[k|k
‑
1]+r),进入步骤s11;
[0017]
步骤s11:执行计算步骤:ist[k|k]=ist[k|k
‑
1]+k[k]*(y[k]
‑
ist[k|k
‑
1]),将ist[k|k]作为dcdc变换器输入电流估计值,进入步骤s12;
[0018]
步骤s12:执行计算步骤:p[k|k]=(1
‑
k[k])*p[k|k
‑
1],进入步骤s13;
[0019]
步骤s13:更新k=k+1,进入步骤s2;
[0020]
所述的公式1为:
[0021]
iavg=uout/(uout
‑
uin)*duty*tpwm*uin*duty/2。
[0022]
所述的功率开关器件开关周期tpwm:
[0023]
tpwm=t3
‑
t0。
[0024]
所述的第一时间段:
[0025]
t1
‑
t0=duty*tpwm。
[0026]
所述的最大电流imax第一计算公式:
[0027]
imax=uin*duty*tpwm。
[0028]
所述的最大电流imax第二计算公式:
[0029]
imax=(uout
‑
uin)*(t2
‑
t1)。
[0030]
所述的功率器件开关周期内dcdc变换器输入电流对时间积分area:
[0031]
area=(t1
‑
t0)*imax/2+(t2
‑
t1)*imax/2;
[0032]
area=duty*tpwm*uin*duty*tpwm/2+uin*duty*tpwm/(uout
‑
uin)*uin*duty*tpwm/2;
[0033]
area=[1+uin/(uout
‑
uin)]*duty*tpwm*uin*duty*tpwm/2;
[0034]
area=uout/(uout
‑
uin)*duty*tpwm*uin*duty*tpwm/2。
[0035]
所述的功率器件开关周期内dcdc变换器平均输入电流iavg:
[0036]
iavg=area/(t3
‑
t0)=area/tpwm;
[0037]
iavg=uout/(uout
‑
uin)*duty*tpwm*uin*duty*tpwm/2/tpwm;
[0038]
iavg=uout/(uout
‑
uin)*duty*tpwm*uin*duty/2(公式1)。
[0039]
所述的dcdc变换器输入电流状态估计方程:
[0040]
ist[k]=a*ist[k
‑
1]+b*iavg[k
‑
1](公式2);
[0041]
y[k]=isnr[k](公式3)。
[0042]
所述的ist为dcdc变换器输入电流估计值,isnr为dcdc变换器输入电流传感器测量输入电流值,y为状态方程测量值,k为离散系统时间片段编号(k≥1),a、b为状态方程系数,q为状态方程协方差,r为传感器测量噪声协方差。系数a、b、q、r可根据dcdc变换器实际情况进行选取。
[0043]
所述的断流模式指当dcdc变换器中功率开关器件的脉宽调制占空比较小时,dcdc变换器输入电流在脉宽调制周期内有一段时间持续为零,即输入电流在脉宽调制周期内不
能一直大于零。
[0044]
与现有技术相比,本发明具有以下优点:在现有dcdc变换器硬件配置基础上,利用现有传感器信息和dcdc变换器功率开关器件控制命令,实现信息融合,从而提高断流模式下dcdc变换器输入电流测量精度。
附图说明
[0045]
图1是本发明的控制流程图。
[0046]
图2是本发明的dcdc变换器基本原理。
[0047]
图3是本发明在断流模式下dcdc变换器输入电流变化过程示意图。
具体实施方式
[0048]
以下是本发明的具体实施例并结合附图,对本发明的技术方案作进一步的描述,但本发明并不限于这些实施例。
[0049]
如图1所示,本燃料电池系统dcdc变换器控制方法,其特征在于,包括以下步骤:
[0050]
步骤s1:控制方法流程开始,进入步骤s2;
[0051]
步骤s2:判断是否dcdc变换器进入断流模式;如果是,则进入步骤s5;如果否,则进入步骤s3;
[0052]
步骤s3:设置k=0,进入步骤s4;
[0053]
步骤s4:控制方法流程结束;
[0054]
步骤s5:判断k是否大于1;如果是,则进入步骤s7;如果否,则进入步骤s6;
[0055]
步骤s6:设置k=1,ist[0|0]=0,p[0|0]=q,进入步骤s7;
[0056]
步骤s7:读取dcdc变换器输入电压uin、输出电压uout、功率开关器件脉宽调整周期tpwm、功率开关器件脉宽调制占空比duty,根据公式1计算dcdc变换器平均输入电流iavg[k
‑
1],进入步骤s8;
[0057]
步骤s8:执行计算步骤:ist[k|k
‑
1]=a*ist[k
‑
1|k
‑
1]+b*iavg[k
‑
1],进入步骤s9;
[0058]
步骤s9:执行计算步骤:p[k|k
‑
1]=a*p[k
‑
1|k
‑
1]*a+q,进入步骤s10;
[0059]
步骤s10:执行计算步骤:k[k]=p[k|k
‑
1]/(p[k|k
‑
1]+r),进入步骤s11;
[0060]
步骤s11:执行计算步骤:ist[k|k]=ist[k|k
‑
1]+k[k]*(y[k]
‑
ist[k|k
‑
1]),将ist[k|k]作为dcdc变换器输入电流估计值,进入步骤s12;
[0061]
步骤s12:执行计算步骤:p[k|k]=(1
‑
k[k])*p[k|k
‑
1],进入步骤s13;
[0062]
步骤s13:更新k=k+1,进入步骤s2;
[0063]
公式1为:
[0064]
iavg=uout/(uout
‑
uin)*duty*tpwm*uin*duty/2。
[0065]
功率开关器件开关周期tpwm:
[0066]
tpwm=t3
‑
t0。
[0067]
第一时间段:
[0068]
t1
‑
t0=duty*tpwm。
[0069]
最大电流imax第一计算公式:
[0070]
imax=uin*duty*tpwm。
[0071]
最大电流imax第二计算公式:
[0072]
imax=(uout
‑
uin)*(t2
‑
t1)。
[0073]
功率器件开关周期内dcdc变换器输入电流对时间积分area:
[0074]
area=(t1
‑
t0)*imax/2+(t2
‑
t1)*imax/2;
[0075]
area=duty*tpwm*uin*duty*tpwm/2+uin*duty*tpwm/(uout
‑
uin)*uin*duty*tpwm/2;
[0076]
area=[1+uin/(uout
‑
uin)]*duty*tpwm*uin*duty*tpwm/2;
[0077]
area=uout/(uout
‑
uin)*duty*tpwm*uin*duty*tpwm/2。
[0078]
功率器件开关周期内dcdc变换器平均输入电流iavg:
[0079]
iavg=area/(t3
‑
t0)=area/tpwm;
[0080]
iavg=uout/(uout
‑
uin)*duty*tpwm*uin*duty*tpwm/2/tpwm;
[0081]
iavg=uout/(uout
‑
uin)*duty*tpwm*uin*duty/2(公式1)。
[0082]
dcdc变换器输入电流状态估计方程:
[0083]
ist[k]=a*ist[k
‑
1]+b*iavg[k
‑
1](公式2);
[0084]
y[k]=isnr[k](公式3)。
[0085]
ist为dcdc变换器输入电流估计值,isnr为dcdc变换器输入电流传感器测量输入电流值,y为状态方程测量值,k为离散系统时间片段编号(k≥1),a、b为状态方程系数,q为状态方程协方差,r为传感器测量噪声协方差。系数a、b、q、r可根据dcdc变换器实际情况进行选取。
[0086]
断流模式指当dcdc变换器中功率开关器件的脉宽调制占空比较小时,dcdc变换器输入电流在脉宽调制周期内有一段时间持续为零,即输入电流在脉宽调制周期内不能一直大于零。
[0087]
质子交换膜燃料电池是一种电化学反应装置。在交通运输领域较为常见的是氢质子交换膜燃料电池,可以将氢气和氧气中存储的化学能转换为电能并生成水,氢气往往来自氢气存储装置(比如高压氢气瓶),而氧气可来自空气或者存储有氧气的气瓶。将多片质子交换膜燃料电池单片串联在一起,形成质子交换膜燃料电池堆。
[0088]
dcdc变换器是一种直流
‑
直流电力变换装置,输入端是直流电压和直流电流,输出端是直流电压和直流电流,其功能是将输入端直流电压调整为输出端直流电压,除受自身能量转换效率导致能量损失外,该装置本身并不具备持续消耗能量的能力。dcdc变换器通常是由功率开关器件、电感器、电容器、二极管等组成。
[0089]
断流模式是指当dcdc变换器中功率开关器件的脉宽调制占空比较小时,dcdc变换器输入电流在脉宽调制周期内有一段时间持续为零,也就是输入电流在脉宽调制周期内不能一直大于零。
[0090]
卡尔曼滤波是一种利用线性系统状态方程,通过系统输入输出观测数据,对系统状态进行最优估计的算法。由于观测数据中包括系统中的噪声和干扰的影响,所以最优估计也可看作是滤波过程。数据滤波是去除噪声还原真实数据的一种数据处理技术,卡尔曼滤波在测量方差已知的情况下能够从一系列存在测量噪声的数据中,估计动态系统的状态。由于它便于计算机编程实现,并能够对现场采集的数据进行实时的更新和处理,卡尔曼
滤波是目前应用最为广泛的滤波方法,在通信、导航、制导与控制等多领域得到了较好的应用。
[0091]
如图2所示,dcdc变换器是由电感器l1、功率开关器件q1、二极管d1、电容器c1组成,输入电流uin、输入电流iin、输出电流iout、输出电压uout。功率开关器件q1的脉宽调制占空比为duty。电感器l1负极与功率开关器件漏极(igbt或sic)或集电极(mosfet)连接、与二极管d1阳极连接,二极管d1阴极与电容器c1正极连接、与dcdc变换器输出端正极连接,电感器l1正极与dcdc变换器输入端正极连接,功率开关器件源极(igbt/sic)或发射极(mosfet)与电容器c1负极连接、与dcdc变换器输出端负极连接、与dcdc变换器输入端负极连接。输入端电压传感器并联在dcdc变换器输入端正极与负极之间,输出端电压传感器并联在dcdc变换器输出端正极与负极之间。dcdc变换器输入端电流传感器测量dcdc变换器输入端正极与电感器l1正极之间连接线束的流经电流,dcdc变换器输出端电流传感器测量dcdc变换器输出端正极与“电容器c1正极与二极管d1阴极汇合节点”之间连接线束的流经电流。
[0092]
如图3所示,在t0时刻之前,功率开关器件处于关闭状态。在t0时刻,功率开关器件导通。在t1时刻,功率开关器件关闭。在t0到t1时刻之间,dcdc变换器输入电流iin从零逐渐升高到最大电流imax。从t1时刻开始,dcdc变换器输入电流iin从最大电流imax逐渐降低到零。在t2时刻,dcdc变换器输入电流iin降低为零。在t2到t3时刻之间,dcdc变换器输入电流iin保持为零。在t1到t3时刻之间,功率开关器件保持关闭。在t3时刻,功率开关器件再次导通。如此不断重复t0到t3时刻之间的过程。
[0093]
本文中所描述的具体实施例仅仅是对本发明精神作举例说明。本发明所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本发明的精神或者超越所附权利要求书所定义的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1