振动型马达的控制设备以及驱动设备的制作方法
1.本发明涉及振动型马达的控制设备以及驱动设备。
背景技术:
2.传统上已知,当使用配备有谐振电路的放大器来驱动诸如超声波马达等的振动型马达时,电压和/或电流波形根据驱动频率而失真,并且驱动性能和功率效率下降。日本特开(“jp”)2000-70851公开了使用配备有模拟滤波器和线性放大器的驱动电路来将超声波马达的驱动波形转换成正弦波以改善由升压电路引起的谐波失真的方法。jp 2000-184759公开了通过使用切换电路调整脉冲宽度来改善超声波马达的驱动电压波形的失真以改善由升压电路引起的谐波失真的方法。
3.jp 2000-70851中所公开的方法在改善驱动波形的失真方面是有效的,但使用模拟滤波器和线性放大器在功耗(功率效率)方面是不利的。jp2000-184759中所公开的方法可以改善电压波形的失真,但不能改善电流波形的失真。
技术实现要素:
4.本发明提供一种振动型马达的控制设备以及驱动设备,其各自均可以改善驱动性能和功率效率降低。
5.根据本发明的一方面的一种振动型马达的控制设备,所述控制设备包括:驱动信号生成单元,其被配置为生成所述振动型马达的驱动信号;以及升压电路,其被配置为使所述驱动信号升压。所述驱动信号生成单元基于所述振动型马达的驱动频率来改变所述驱动信号的占空比。具有上述控制设备的驱动设备也构成本发明的另一方面。
6.一种振动型马达的控制设备,所述控制设备包括:驱动信号生成单元,其被配置为生成所述振动型马达的驱动信号;以及升压电路,其被配置为使所述驱动信号升压。所述驱动信号生成单元基于流经所述振动型马达的电流来改变所述驱动信号的占空比。
7.一种驱动设备,包括:振动型马达;从动构件,其被所述振动型马达驱动;驱动信号生成单元,其被配置为生成所述振动型马达的驱动信号;以及升压电路,其被配置为使所述驱动信号升压,由所述升压电路升压后的驱动信号被施加到所述振动型马达。所述驱动信号生成单元基于所述振动型马达的驱动频率来改变所述驱动信号的占空比。
8.一种驱动设备,包括:振动型马达;从动构件,其被所述振动型马达驱动;驱动信号生成单元,其被配置为生成所述振动型马达的驱动信号;以及升压电路,其被配置为使所述驱动信号升压,由所述升压电路升压后的驱动信号被施加到所述振动型马达。所述驱动信号生成单元基于流经所述振动型马达的电流来改变所述驱动信号的占空比。
9.通过以下参考附图对典型实施例的说明,本发明的更多特征将变得明显。
附图说明
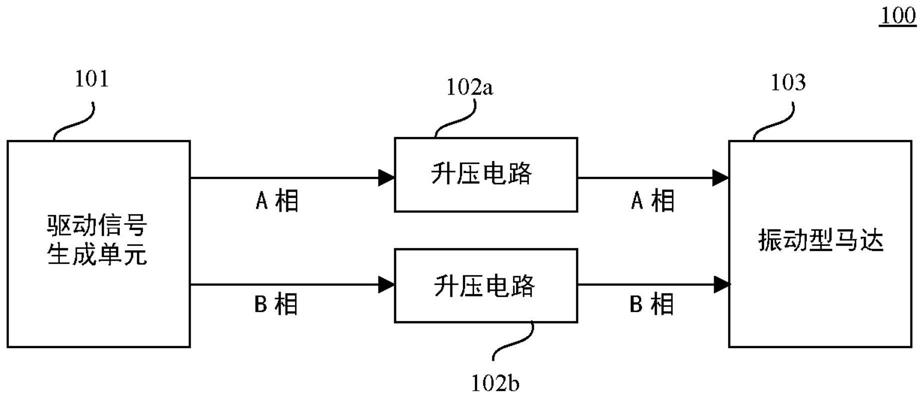
10.图1是根据各实施例的振动型马达的控制设备的框图。
11.图2是根据第一实施例的振动型马达的控制设备的详细图。
12.图3是根据第一实施例的h桥电路的例示性输入/输出关系。
13.图4是示出根据第一实施例的确定占空比的方法的流程图。
14.图5是第一实施例中的通过阶跃响应测量所获得的例示性结果。
15.图6示出第一实施例中的驱动频率和占空比之间的关系。
16.图7a至图7c示出第一实施例中的用于通过改变占空比来减少电流失真的示例。
17.图8是根据第二实施例的振动型马达的控制设备的详细图。
18.图9是示出根据第二实施例的确定占空比的方法的流程图。
19.图10a至图10c示出根据第二实施例的基准电流波形和实际测量电流波形的示例。
具体实施例
20.现在参考附图,将给出对根据本发明的实施例的详细说明。
21.第一实施例
22.现在参考图1至图7c,将给出对根据本发明的第一实施例的振动型马达(超声波马达)的控制设备的说明。本实施例将论述使用阶跃响应来测量升压电路的特性、并且根据升压电路的特性来确定适当占空比的方法。
23.图1是振动型马达的控制设备100的框图。驱动信号生成单元101生成用于驱动振动型马达103中的压电元件222a和222b的频率信号(驱动信号)。升压电路102a和102b使施加到压电元件222a和222b的电压(由驱动信号生成单元101生成的频率信号)升压到致动器工作所需的电压。振动型马达103具有压电元件222a和222b,并且通过向压电元件222a和222b施加频率信号以使这些压电元件振动来用作致动器。振动型马达103的结构和振动模式例如可以使用与jp 2016-218349和jp 2017-060279中所述的振动型马达的已知技术相同的已知技术,并且将省略其说明。
24.本实施例将论述组合以下两个升压方法的升压方法:使用变压器的升压方法、以及使用电感元件与压电元件的电容成分之间的谐振的升压方法。
25.图2是振动型马达的控制设备100的详细图。驱动信号生成单元101包括控制信号生成单元200、电路特性保存单元(存储器)201、以及h桥电路210a和210b。控制信号生成单元200基于控制命令来生成驱动振动型马达103所需的频率信号。电路特性保存单元201保存升压电路102a、102b的谐振周期等的电路特性。
26.图3示出h桥电路210a的例示性输入/输出(i/o)关系。当将作为占空比为25%的方波信号的输入a输入到h桥电路210a的第一输入端子、并且将作为占空比为25%的方波信号的输入/a输入到第二输入端子时,产生如输出那样的驱动信号。输入到第一输入端子的信号和输入到第二输入端子的信号是相位彼此偏移了180度的信号。变成输入信号的high(高)时段的时间段被称为ton时间301,并且变成low(低)时段的时间段被称为toff时间302。
27.升压电路102a包括电感元件220a、变压器221a和振动型马达103的压电元件222a。升压电路102a使用变压器221a对从驱动信号生成单元101输出的信号进行升压,并且利用电感元件220a和压电元件222a之间的谐振来施加驱动振动型马达103所需的电压的频率信号。控制命令单元230发出驱动速度命令以控制振动型马达103。升压电路102b具有电感元
件220b、变压器221b和压电元件222b,并且以与升压电路102a相同的方式起作用。
28.图4是示出根据本实施例的确定占空比的方法的流程图。首先,在步骤s11中,测量阶跃响应,以测量升压电路102a和102b的特性(谐振特性)。图5是阶跃响应测量的例示性结果。当阶跃输入波形501被输入到升压电路102a和102b时,获得阶跃响应波形502。
29.为了使用压电元件222a和222b作为振动型马达所施加的周期信号通常是阶跃响应波形502的第一波的重复状态。从测量开始时间起直到第一波的峰电压为止的时间段被设置为high 503。这是与阶跃响应波形的谐振周期504的大约一半(谐振周期的一半)相对应的时间段。由于阶跃响应测量方法是已知的,因此将省略其说明。阶跃响应测量方法可以使用诸如示波器等的外部装置、或者诸如设置有测量电路(未示出)和控制信号生成单元的微计算机等的信息处理设备。尽管图5示出了电压波形,但可以测量电流波形。
30.接着,在图4的步骤s12中,将所测量到的high 503存储在电路特性保存单元201中。在振动型马达103的实际驱动中,在步骤s13中,驱动信号生成单元101根据控制命令单元230的控制命令来确定驱动频率f和相位差θ。接着,在步骤s14中,驱动信号生成单元101如下针对驱动频率f确定占空比:
31.占空比[%]=thigh[sec]
×
驱动频率f[hz]
×
100。
[0032]
接着,在步骤s15中,控制信号生成单元200输出具有所确定的驱动频率f、相位差θ和占空比的频率信号(驱动信号)。在本实施例中,驱动信号生成单元101通过计算来获得占空比,但本发明不限于该实施例,并且可以将ton时间301固定为high 503。步骤s11和s12是例如在工厂调整或电源启动时进行的,并且可以不是每次均进行。
[0033]
图6示出本实施例中的驱动频率和占空比之间的关系、以及在谐振周期504例如为7.6μsec的情况下控制信号生成单元200所选择的例示性占空比。
[0034]
图7a和7b示出根据本实施例的用于通过改变占空比来减少电流失真的示例、以及当响应于来自控制命令单元230的速度命令而如图6所示改变驱动频率和占空比时观察到的变压器221a和221b的二次侧电流波形。图7a示出当驱动频率为92mhz时的示例,并且图7b示出当驱动频率为88mhz时的示例。图7c是占空比是34.96%(其是驱动频率为92mhz时的值)、并且驱动频率为88mhz的比较例,并且电流波形的失真大于本实施例中的失真。
[0035]
本实施例论述了将升压电路102a、102b的谐振周期保存在电路特性保存单元201中、并且利用控制信号生成单元200计算占空比的示例,但可以基于驱动频率来调整占空比。
[0036]
本实施例通过阶跃响应测量来测量升压电路102a和102b的谐振特性,但是可以使用另一测量方法或先前计算出的理论值。由于谐振特性可以根据温度等而改变,因此可以在利用温度校正器校正温度之后调整占空比。可以使用更高的频率以伪方式(pseudo manner)生成输入波形,并且本实施例广泛地适用于用于驱动振动型马达的频率。
[0037]
因此,控制设备使用升压电路来生成振动型马达的驱动波形,并适当地调整振动型马达的驱动信号的占空比。也就是说,驱动信号生成单元基于振动型马达的驱动频率来改变驱动信号的占空比。驱动信号生成单元在驱动频率是第一驱动频率的情况下,可以将占空比设置为第一占空比,并且在驱动频率是高于第一驱动频率的第二驱动频率的情况下,可以将占空比设置为高于第一占空比的第二占空比。驱动信号生成单元可以设置占空比,以减少或最小化振动型马达的电流波形的电流失真。驱动信号生成单元可以设置占空
比,以使振动型马达的电流波形更接近于正弦波。驱动信号生成单元可以基于与升压电路的谐振周期的一半相对应的时间段来确定占空比。振动型马达的控制设备还可以包括用于存储与谐振周期的一半相对应的时间段的存储器(电路特性保存单元201),并且驱动信号生成单元基于与谐振周期的一半相对应的时间段(high 503)以及驱动频率来确定占空比。在本实施例中,驱动信号对应于用于驱动振动型马达中的压电元件的频率信号。由此,可以改善压电元件222a、222b中的电流失真,并且可以改善功率效率。
[0038]
第二实施例
[0039]
现在参考图8至图10c,将给出对根据本发明第二实施例的振动型马达的控制设备的说明。本实施例通过使用电流检测电路检测流经振动型马达的电流,通过在电流检测电路所获得的电流大于正弦波形的情况下减少占空比,并且通过在电流检测电路所获得的电流小于正弦波形的情况下增加占空比,来改善电流失真。
[0040]
图8是根据本实施例的振动型马达的控制设备100a的详细图。驱动信号生成单元101a包括控制信号生成单元200、基准电流波形保存单元702、比较单元703、以及h桥电路210a和210b。控制信号生成单元200基于控制命令来生成驱动振动型马达103所需的频率信号(驱动信号)。升压电路102a包括电感元件220a、变压器221a、以及振动型马达103的压电元件222a。
[0041]
升压电路102a通过变压器221a对从驱动信号生成单元101a输出的信号进行升压,并且利用电感元件220a和压电元件222a之间的谐振来施加驱动振动型马达103所需的电压的频率信号。升压电路102b包括电感元件220b、变压器221b和压电元件222b,并且具有与升压电路102a相同的功能。电流检测单元701a和701b检测流经振动型马达103的电流。比较单元703将电流检测单元701a和701b所检测到的电流(测量电流)与基准电流波形保存单元702所保存的基准电流进行比较。控制命令单元230发出驱动速度命令以控制振动型马达103。
[0042]
图9是示出根据本实施例的确定占空比的方法的流程图。首先,在步骤s21中,进行模拟以计算升压电路102a和102b的理论电流波形。由于对电路求解的方法是已知的,因此将省略其说明。接着,在步骤s22中,将步骤s21的模拟结果作为基准电流(基准电流波形)存储在基准电流波形保存单元702中。接着,在步骤s23中,驱动信号生成单元101a设置占空比的初始值。接着,在步骤s24中,在驱动振动型马达103时,驱动信号生成单元101a基于来自控制命令单元230的控制命令来确定驱动频率f和相位差θ。接着,在步骤s25中,驱动信号生成单元101a输出用于驱动振动型马达103的频率信号(驱动信号)。
[0043]
接着,在步骤s26中,驱动信号生成单元101a基于利用在步骤s25中输出的频率信号而驱动振动型马达103的结果来调整占空比。在本实施例中,比较单元703观察例如一个周期的电流波形(电流检测单元701a和701b所检测到的电流波形(实际测量的电流波形)),并且判断该电流波形是否大于基准电流波形。如果一个周期的电流波形大于基准电流波形,则流程进入步骤s27。在步骤s27中,驱动信号生成单元101a减少占空比。例如,当占空比下降了0.1%时,下一周期的占空比变为49.9%。另一方面,如果在步骤s26中一个周期的电流波形小于基准电流波形,则流程进入步骤s28。在步骤s28中,驱动信号生成单元101a增加占空比。例如,当占空比增加了0.1%时,下一周期的占空比变为50.1%。判断标准例如可以利用通过对一个周期求积分所获得的大小来比较,或者可以针对各采样进行比较。
[0044]
图10a至图10c示出基准电流波形和实际测量的电流波形的示例。图10a至图10c示出由比较单元703彼此比较的、基准电流波形保存单元702中所存储的基准电流波形与电流检测单元701a和701b所测量到的电流波形的示例。虚线指示基准电流波形,并且实线指示所测量到的电流波形。图10a和图10b示出所测量到的电流波形大于基准电流波形的示例。图10c示出所测量到的电流波形小于基准电流波形的示例。图10a示出所测量到的电流波形始终大于基准电流波形的示例,并且图10b示出在一部分时间段中所测量到的电流波形小于基准电流波形的示例。
[0045]
在本实施例中,使用两个电流检测单元701a和701b,振动型马达103的两个测量点处的测量结果是相同的,但这两个测量点处的测量结果可以是不同的。在这种情况下,可以使用这两个测量结果的平均值,或者可以优先采用这些测量结果其中之一的值。本实施例使用两个电流检测单元,但可以通过仅使用一个电流检测单元来使用一个测量点处的测量结果。
[0046]
因此,控制设备使用升压电路来生成振动型马达的驱动波形,并且使用电流检测单元来适当地调整振动型马达的驱动信号的占空比。也就是说,驱动信号生成单元基于流经振动型马达的电流来改变驱动信号的占空比。振动型马达的控制设备可以包括:电流检测单元,用于检测流经振动型马达的电流;以及比较单元,用于将电流检测单元所检测到的电流与基准电流进行比较。驱动信号生成单元可以基于利用比较单元的电流和基准电流之间的比较结果来确定占空比。驱动信号生成单元可以在电流大于基准电流的情况下降低占空比,并且在电流小于基准电流的情况下增加占空比。由此,可以改善压电元件222a、222b的电流失真,并且可以改善功率效率。
[0047]
根据各实施例的振动型马达的控制设备基于振动型马达的驱动信号的驱动频率和电流值来适当地调整占空比,并由此改善压电元件的电流失真。因此,各实施例可以提供能够改善驱动性能和功率效率的下降的振动型马达的控制设备。
[0048]
根据各实施例的振动型马达的控制设备适用于各种驱动设备。包括振动型马达的控制设备、该振动型马达和该振动型马达所要驱动的从动构件的例示性驱动设备是诸如具有透镜作为从动构件的镜头设备或包括摄像方向改变构件作为从动构件的摄像设备等的光学设备、以及诸如包括安装有移动物体的工作台作为从动构件的工作台设备或包括臂或手指作为从动构件的机器人臂等的工业设备。
[0049]
其它实施例
[0050]
本发明的实施例还可以通过如下的方法来实现,即,通过网络或者各种存储介质将执行上述实施例的功能的软件(程序)提供给系统或装置,该系统或装置的计算机或是中央处理单元(cpu)、微处理单元(mpu)读出并执行程序的方法。
[0051]
尽管已经参考典型实施例说明了本发明,但是应该理解,本发明不限于所公开的典型实施例。所附权利要求书的范围符合最宽的解释,以包含所有这类修改、等同结构和功能。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1