并网逆变器锁相环参数辨识方法
1.本发明属于电能质量和控制领域,具体涉及一种并网条件下并网逆变器锁相环参数辨识方法。在分布式发电研究中,为了对并网逆变器进行稳定性分析需要获取其锁相环参数,提供一种在锁相环参数未知的情况下辨识锁相环参数方法。
技术背景
2.基于阻抗模型的并网系统稳定性分析,需要对并网逆变器进行阻抗建模获得其阻抗模型。而阻抗模型的建立需要获取并网逆变器的控制参数,如电流环参数、锁相环参数等,参数辨识方法在逆变器控制参数未知的情况下使用参数辨识方法辨识出逆变器控制参数。
3.在并网逆变器阻抗建模中,锁相环参数的影响十分重要不可忽略,现有的并网逆变器参数辨识方法忽略了锁相环参数,仅针对于除锁相环参数以外的参数进行辨识。例如:
4.文献1“沈欣炜,郑竞宏,朱守真,朱凌志,施涛,曲立楠.光伏并网逆变器控制参数的dq轴解耦辨识策略[j].电力系统自动化,2014,38(04):38
‑
43.”提出了dq轴解耦辨识策略,建立并网逆变器dq轴解耦辨识模型,分别考虑d轴和q轴上的不同参数的辨识效果,选择在不同坐标轴上辨识不同参数,但是这种辨识策略中只建立了并网逆变器的dq轴模型,在建模和分析中忽略了锁相环参数,所以无法对锁相环参数进行辨识。
[0005]
文献2“金宇清,鞠平,潘学萍,孙黎霞,张彦涛.光伏逆变器控制参数的分步辨识方法[j].电网技术,2015,39(03):594
‑
600.”提出了一种在二次侧量测信号上施加扰动的方法,可以在施加某个量测信号激励时可以屏蔽其他量测信号的变化,从而实现内外环控制参数辨识中的解耦,而此种辨识方法在建立扰动模型时是在dq坐标系下进行的忽略了锁相环参数,在辨识过程中也没有考虑锁相环参数的辨识。
[0006]
文献3“孙丽玲.并网逆变器惯量和阻尼参数辨识研究[d].合肥工业大学,2020.”中对虚拟同步机控制的并网逆变器建立了考虑锁相环的统一状态空间模型并对其进行参数辨识,但是在实际的辨识过程中锁相环带宽远远大于系统带宽,所以算法不能准确找到锁相环参数信息,也无法对锁相环参数进行辨识。
[0007]
上述文献中所述方法的不足如下:
[0008]
1、现有的参数辨识方法,在对逆变器参数进行辨识时,在dq坐标系下建模并施加扰动,或者在辨识过程中直接忽略了锁相环参数的影响,这些原因导致了锁相环参数无法被辨识出来。
[0009]
2、锁相环与电流环等其他控制环耦合紧密,对所相环施加的扰动也会对其他控制环产生影响,所以无法通过传统的施加扰动观察响应的方法来对锁相环参数进行辨识。
[0010]
针对上述问题提出了并网逆变器锁相环参数辨识方法,并网逆变器序阻抗模型为小信号模型,锁相环参数在序阻抗模型中影响不可忽略,并且利用阻抗测量的方法可以测量特定频率处的序阻抗,使用粒子群优化算法可以实现非线性模型的参数估计,最后处理参数估计数据获得辨识结果。
技术实现要素:
[0011]
本发明为了解决传统并网逆变器参数辨识过程中因建模和锁相环与其他控制环耦合带来的锁相环参数无法辨识问题,提供了一种基于并网逆变器序阻抗模型与粒子群优化算法的并网逆变器锁相环参数辨识方法,所述锁相环参数包括锁相环比例系数和积分系数。
[0012]
为解决本发明的技术问题,本发明提供了一种并网逆变器锁相环参数辨识方法,所述锁相环参数包括锁相环比例系数和锁相环积分系数;并网逆变器锁相环参数辨识方法所涉及的拓扑结构包括并网逆变器、电网和锁相环参数辨识装置;所述锁相环参数辨识装置包括阻抗测量及计算单元和参数估计及数据处理单元;所述阻抗测量及计算单元包括采样单元和计算单元,所述采样单元接入电网与并网逆变器相连接的公共耦合点pcc处,实现对公共耦合点pcc处电压和电流的采样,所述计算单元与采样单元的输出端相连接,计算单元与参数估计及数据处理单元在算法内部实现数据交互;
[0013]
所述参数辨识方法建立含有未知并网逆变器锁相环参数的待估计阻抗,且使用粒子群优化算法结合测量阻抗进行参数估计,获得多组并网逆变器锁相环估计参数,对多组并网逆变器锁相环估计参数进行处理获得参数辨识结果,具体的,包括以下步骤:
[0014]
步骤1,参数设定,包括以下参数:
[0015]
锁相环比例系数辨识下限k
ppllmin
,锁相环比例系数辨识上限k
ppllmax
,锁相环积分系数辨识下限k
ipllmin
,锁相环积分系数辨识上限k
ipllmin
;
[0016]
设在整个辨识过程中共进行了n次采样,将n次采样中的任意一次采样记为第y次采样,与第y次采样对应的频率记为阻抗测量频率f
y
,y=1,2,...,n,n为正整数;
[0017]
步骤2,记并网逆变器的正序阻抗为z
ip
(k
ppll
,k
ipll
,f
d
),其中,k
vpll
为待辨识锁相环比例系数,k
ipll
为待辨识锁相环积分系数,f
d
为电抗频率,所述电抗频率为正序阻抗z
ip
(k
ppll
,k
ipll
,f
d
)中电抗部分的频率,即正序阻抗z
ip
(k
ppll
,k
ipll
,f
d
)仅包含待辨识锁相环比例系数k
ppll
和待辨识锁相环积分系数k
ipll
2个未知参数;
[0018]
步骤3,将锁相环参数辨识装置接入公共耦合点pcc;通过采样单元采样n个阻抗测量频率f
y
时公共耦合点的三相线电压、并记为三相线电压u
y
,采样n个阻抗测量频率f
y
时公共耦合点的三相电流、并记为三相电流i
y
,y=1,2,...,n;
[0019]
步骤4,将步骤3采样得到的n个三相线电压u
y
和n个三相电流i
y
送入计算单元,得到n个测量正序阻抗,并记为测量正序阻抗z
rpy
,y=1,2,...,n;
[0020]
步骤5,将n个阻抗测量频率f
y
和n个测量正序阻抗z
rpy
送入参数估计及数据处理单元,使用n个测量正序阻抗z
rpy
进行参数估计;
[0021]
步骤5.1,定义待估计正序阻抗z
ipdy
(k
pplldy
,k
iplldy
,f
ddy
),其中,k
pplldy
为待估计锁相环比例系数,k
iplldy
为待估计锁相环积分系数,f
ddy
为待估计正序阻抗z
ipdy
中电抗部分中的频率,y=1,2,...,n;令f
ddy
=f
y
,则待估计正序阻抗z
ipdy
表达为:z
ipdy
(k
pplldy
,k
iplldy
,f
y
);
[0022]
步骤5.2,使用粒子群优化算法使待估计正序阻抗z
ipdy
的实部和虚部与测量正序阻抗z
rpy
的实部和虚部一一逼近,直至满足估计条件,得到满足要求的待估计锁相环比例系数k
pplldy
和待估计锁相环积分系数k
iplldy
,具体的,建立粒子群优化算法函数f
o
(k
pplldy
,k
iplldy
),通过计算得到粒子群群体最佳位置gbest,gbest=(gbest
1 gbest2),其中gbest1为粒子群群体最佳位置第一列,gbest2为粒子群群体最佳位置第二列;
中的任意一行粒子记为x
a
,a=1,2,...,n,任意一行粒子x
a
包含任意一行第一列的粒子x
a1
,a=1,2,...,n和任意一行第二列的粒子x
a2
,a=1,2,...,n;
[0039]
粒子群优化算法粒子种群x
n
×2和粒子群优化算法粒子种群x
n
×2中的任意一行粒子x
a
如下:
[0040][0041]
x
a
=(x
a1 x
a2
);
[0042]
随机生成n行2列的二维矩阵记为粒子群优化算法粒子速度v
n
×2,且每个元素的随机数范围在粒子速度最小值v
min
和粒子速度最大值v
max
之间,其中,粒子群优化算法粒子速度v
n
×2中的任意一个粒子速度记为v
ab
,a=1,2,...,n,b=1,2,粒子群优化算法粒子速度v
n
×2中的任意一行粒子速度记为v
a
,a=1,2,...,n,任意一行粒子速度v
a
包含任意一行第一列的粒子速度v
a1
,a=1,2,...,n和任意一行第二列的粒子v
a2
,a=1,2,...,n;
[0043]
粒子群优化算法粒子速度v
n
×2和粒子群优化算法粒子速度v
n
×2中的任意一行粒子速度v
a
如下:
[0044][0045]
v
a
=(v
a1 v
a2
);
[0046]
步骤5.2.3,计算粒子群优化算法粒子种群x
n
×2中的任意一行粒子x
a
的种群适应度,记为粒子群适应度fit
a
,a=1,2,...,n,粒子群适应度fit
a
的值如下:
[0047]
fit
a
=f
o
(x
a1
,x
a2
);
[0048]
记粒子群任意一行最佳位置为pbest
a
,a=1,2,...,n,pbest
a
=(pbest
a1 pbest
a2
),其中,粒子群任意一行最佳位置第一列为pbest
a1
,a=1,2,...,n,粒子群任意一行最佳位置第二列为pbest
a2
,a=1,2,...,n,粒子群任意一行最佳位置为pbest
a
如下:
[0049]
pbest
a1
=x
a1
[0050]
pbest
a2
=x
a2
[0051]
pbest
a
=x
a
;
[0052]
寻找fit
a
中的最小值记为粒子群最小适应度fit
amin
,粒子群最小适应度fit
amin
所对应的那一行粒子,记为粒子群最小适应度行粒子x
amin
,x
amin
=(x
a1min x
a2min
),其中,x
a1min
为粒子群最小适应度行第一列粒子,x
a2min
为粒子群最小适应度行第二列粒子;
[0053]
记粒子群群体最佳位置为gbest,gbest=(gbest
1 gbest2),其中gbest1为粒子群群体最佳位置第一列,gbest2为粒子群群体最佳位置第二列,粒子群群体最佳位置为gbest如下:
[0054]
gbest1=x
a1min
[0055]
gbest2=x
a2min
[0056]
gbest=x
amin
;
[0057]
步骤5.2.4,更新粒子群优化算法粒子种群x
n
×2和粒子群优化算法粒子速度v
n
×2,并进行k次更新,记k次更新中任意一次更新为第k次更新,k=1,2,...,k,k为正整数;
[0058]
记第k次更新时的粒子群优化算法粒子种群为x
n
×
2k
,第k次更新时的粒子群优化算法粒子种群x
n
×
2k
中的任意一个粒子记为x
abk
,a=1,2,...,n,b=1,2,第k次更新时的粒子群优化算法粒子种群x
n
×
2k
中的任意一行粒子记为x
ak
,a=1,2,...,n,任意一行粒子x
ak
包含任意一行第一列的粒子x
a1k
,a=1,2,...,n和任意一行第二列的粒子x
a2k
,a=1,2,...,n,第k次更新时的粒子群优化算法粒子速度为v
n
×
2k
,第k次更新时的粒子群优化算法粒子速度v
n
×
2k
中的任意一个粒子速度记为v
abk
,a=1,2,...,n,b=1,2,第k次更新时的粒子群优化算法粒子速度v
n
×
2k
中的任意一行粒子速度记为v
ak
,a=1,2,...,n,任意一行粒子速度v
ak
包含任意一行第一列的粒子速度v
a1k
,a=1,2,...,n和任意一行第二列的粒子v
a2k
,a=1,2,...,n,k=1,2,...,k;
[0059]
第k次更新时的粒子群优化算法粒子种群x
n
×
2k
和第k次更新时的粒子群优化算法粒子种群x
n
×
2k
中的任意一行粒子x
ak
如下:
[0060][0061]
x
ak
=(x
a1k x
a2k
);
[0062]
第k次更新时的粒子群优化算法粒子速度v
n
×
2k
和第k次更新时的粒子群优化算法粒子速度v
n
×
2k
中的任意一行粒子v
ak
如下:
[0063][0064]
v
ak
=(v
a1k v
a2k
);
[0065]
第k次更新的步骤如下:
[0066]
(1)记第k次更新时的粒子群优化算法粒子速度为v
n
×
2k
,更新公式如下:
[0067]
v
ak
=w1×
v
a(k
‑
1)
+c1×
rand
×
[pbest
‑
x
a(k
‑
1)
]+c2×
rand
×
[gbest
‑
x
a(k
‑
1)
]
[0068]
其中,rand为0到1之间的随机数,k=1,2,...,k;
[0069]
当第一次更新即k=1时,v
a(k
‑
1)
=v
a0
=v
a
,x
a(k
‑
1)
=x
a0
=x
a
;
[0070]
若v
a1k
和v
a2k
中有一个大于v
max
则其值替换成v
max
,若v
a1k
和v
a2k
中有一个小于v
min
则其值替换成v
min
;
[0071]
(2)第k次更新时的粒子群优化算法粒子种群x
n
×
2k
,更新公式如下:
[0072]
x
ak
=x
a(k
‑
1)
+w2×
x
a(k
‑
1)
[0073]
其中,k=1,2,...,k;
[0074]
当第一次更新即k=1时,x
a(k
‑
1)
=x
a0
=x
a
;
[0075]
若x
a1k
和x
a2k
中有一个大于k
ppllmax
则其值替换成k
ppllmax
,x
a1k
和x
a2k
中有一个小于
k
ppltmin
则其值替换成k
ppllmin
;
[0076]
(3)重新计算适应度,第k次更新时的粒子群优化算法粒子种群x
n
×
2k
任意一行粒子x
ak
,的种群适应度,记为粒子群适应度fit
ak
,a=1,2,...,n,粒子群适应度fit
ak
,的值如下:
[0077]
fit
ak
=f
o
(x
a1k
,x
a2k
)
[0078]
其中,k=1,2,...,k;
[0079]
若fit
ak
<f
o
(pbest
a1
,pbest
a2
),则pbest
a1
=x
a1k
,pbest
a2
=x
a2k
,pbest
a
=x
ak
;反之,粒子群任意一行最佳位置pbest
a
保持不变;
[0080]
寻找fit
ak
中的最小值记为第k次更新时粒子群最小适应度fit
amink
,粒子群最小适应度fit
amink
所对应的那一行粒子,记为第k次更新时粒子群最小适应度行粒子x
amink
,x
amink
=(x
a1mink x
a2mink
),其中,x
a1mink
为第k次更新时粒子群最小适应度行第一列粒子,x
a2mink
为第k次更新时粒子群最小适应度行第二列粒子;
[0081]
若fit
amink
<f
o
(gbest1,gbest2),则gbest1=x
a1mink
,gbest2=x
a2mink
,gbest=x
amink
;反之,粒子群群体最佳位置gbest保持不变;
[0082]
步骤5.2.5,输出粒子群群体最佳位置gbest。
[0083]
本发明的并网逆变器锁相环参数辨识方法,综合了并网逆变器序阻抗建模、阻抗测量、粒子群优化算法和处理多组估计数据减小参数辨识误差的方法的优点。其有益效果具体体现如下:
[0084]
1)能够克服传统并网逆变器建模的缺点,解决电流环锁相环耦合紧密的问题,辨识出并网逆变器锁相环参数,在锁相环参数未知的情况下建立并网逆变器阻抗模型对并网系统进行稳定性分析。
[0085]
2)阻抗测量等操作对并网逆变器系统影响很小,不影响并网系统的稳定运行,能够在线辨识出并网逆变器的锁相环参数。
[0086]
3)使用粒子群优化算法对未知参数进行参数估计,克服了传统最小二乘法等算法不能辨识非线性模型的缺点。
[0087]
4)对多组估计参数进行数据处理,剔除误差较大的参数估计数据,减小了辨识过程中的偶然误差和测量误差对辨识结果造成的影响。
附图说明
[0088]
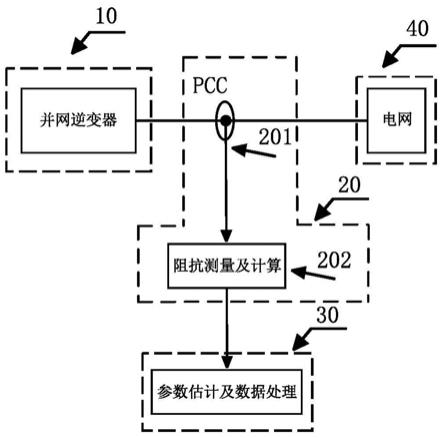
图1为本发明并网逆变器参数辨识方法所涉及的拓扑图。
[0089]
图2为实例中建立的并网逆变器参数辨识方法仿真电路结构图。
[0090]
图3为本发明并网逆变器参数辨识方法的流程图。
[0091]
图4为锁相环比例系数估计值获得锁相环比例系数辨识结果的示意图。
[0092]
图5为锁相环积分系数估计值获得锁相环积分系数辨识结果的示意图。
具体实施方式
[0093]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图,对本发明进行进一步详细说明。
[0094]
图1所示为本发明并网逆变器锁相环参数辨识方法所涉及的拓扑图。由图1可见,该拓扑结构包括并网逆变器10、电网40和锁相环参数辨识装置。所述锁相环参数辨识装置
包括阻抗测量及计算单元20和参数估计及数据处理单元30。所述阻抗测量及计算单元20包括采样单元201和计算单元202,所述采样单元201接入电网40与并网逆变器10相连接的公共耦合点pcc处,实现对公共耦合点pcc处电压和电流的采样,所述计算单元202与采样单元201的输出端相连接,计算单元202与参数估计及数据处理单元30在算法内部实现数据交互。
[0095]
如图2所示为本实施例中建立的并网逆变器参数辨识方法仿真电路结构图,并网逆变器10直流电压v
dc
=1500v,额定功率p
n
=300kw,滤波器电感k=1.4mh,电网40频率f1=60hz、电网线电压有效值v
g
=690v,锁相环输入为pcc点处三相线电压u
y
,输出为相角θ
pll
。
[0096]
本参数辨识方法建立含有未知并网逆变器锁相环参数的待估计阻抗,且使用粒子群优化算法结合测量阻抗进行参数估计,获得多组并网逆变器锁相环估计参数,对多组并网逆变器锁相环估计参数进行处理获得参数辨识结果,图3为本参数辨识方法对应的实施流程图,具体的,包括以下步骤:
[0097]
步骤1,参数设定,包括以下参数:
[0098]
锁相环比例系数辨识下限k
ppllmin
,锁相环比例系数辨识上限k
ppllmax
,锁相环积分系数辨识下限k
ipllmin
,锁相环积分系数辨识上限k
ipllmin
。
[0099]
设在整个辨识过程中共进行了n次采样,将n次采样中的任意一次采样记为第y次采样,与第y次采样对应的频率记为阻抗测量频率f
y
,y=1,2,...,n,n为正整数。
[0100]
在本实施例中,n=249,k
ppllmin
=0,k
ppllmax
=10,k
ipllmin
=0,k
ipllmax
=1000。
[0101]
步骤2,记并网逆变器10的正序阻抗为z
ip
(k
ppll
,k
ipll
,f
d
),其中,k
ppll
为待辨识锁相环比例系数,k
ipll
为待辨识锁相环积分系数,f
d
为电抗频率,所述电抗频率为正序阻抗z
ip
(k
ppll
,k
ipll
,f
d
)中电抗部分的频率,即正序阻抗z
ip
(k
ppll
,k
ipll
,f
d
)仅包含待辨识锁相环比例系数k
ppll
和待辨识锁相环积分系数k
ipll
2个未知参数。
[0102]
所以下面的辨识对象仅为两个未知数。
[0103]
步骤3,将锁相环参数辨识装置接入公共耦合点pcc;通过采样单元201采样n个阻抗测量频率f
y
时公共耦合点的三相线电压、并记为三相线电压u
y
,采样n个阻抗测量频率f
y
时公共耦合点的三相电流、并记为三相电流i
y
,y=1,2,...,n。
[0104]
步骤4,将步骤3采样得到的n个三相线电压u
y
和n个三相电流i
y
,送入计算单元202,得到n个测量正序阻抗,并记为测量正序阻抗z
rpy
,y=1,2,...,n。
[0105]
在本实施例中,共得到249个测量正序阻抗z
rpy
。
[0106]
步骤5,将n个阻抗测量频率f
y
和n个测量正序阻抗z
rpy
送入参数估计及数据处理单元30,使用n个测量正序阻抗z
rpy
进行参数估计,具体步骤为:
[0107]
步骤5.1,定义待估计正序阻抗z
ipdy
(k
pplldy
,k
iplldy
,f
ddy
),其中,k
pplldy
为待估计锁相环比例系数,k
iplldy
为待估计锁相环积分系数,f
ddy
为待估计正序阻抗z
ipdy
中电抗部分中的频率,y=1,2,...,n;令f
ddy
=f
y
,则待估计正序阻抗z
ipdy
表达为:z
ipdy
(k
pplldy
,k
iplldy
,f
y
);
[0108]
步骤5.2,使用粒子群优化算法使待估计正序阻抗z
ipdy
的实部和虚部与测量正序阻抗z
rpy
的实部和虚部一一逼近,直至满足估计条件,得到满足要求的待估计锁相环比例系数k
pplldy
和待估计锁相环积分系数k
iplldy
,具体的,建立粒子群优化算法函数f
o
(k
pplldy
,k
iplldy
),通过计算得到粒子群群体最佳位置gbest,gbest=(gbest
1 gbest2),其中gbest1为粒子群群体最佳位置第一列,gbest2为粒子群群体最佳位置第二列;
[0109]
则锁相环比例系数估计值k
ppllfy
和锁相环积分系数估计值k
ipllfy
分别为:
[0110]
k
ppllfy
=gbest1[0111]
k
ipllfy
=gbest2[0112]
步骤5.3,按照步骤5.1
‑
步骤5.2方法得到n个阻抗测量频率f
y
对应的n个锁相环比例系数估计值k
ppllfy
和n个锁相环积分系数估计值k
ipllfy
,y=1,2,...,n。
[0113]
步骤6,参数估计及数据处理单元30根据预存的算法,对步骤5得到的n个锁相环比例系数估计值k
ppllfy
和锁相环积分系数估计值k
ipllfy
进行处理,具体步骤如下:
[0114]
(1)锁相环比例系数的辨识
[0115]
设锁相环比例系数辨识范围为[k
ppllmin
,k
ppllmax
],将[k
ppllmin
,k
ppllmax
]等分为m个锁相环比例系数辨识区间,并将m个锁相环比例系数辨识区间中的任意一个记为区间q,区间q的范围为[(q
‑
1)δ
p
,qδ
p
],q=1,2,...,m,q为锁相环比例系数辨识区间的序号,δ
p
为锁相环比例系数辨识范围划分步长,δ
p
=(k
ppllmax
‑
k
ppllmin
)/m,m为锁相环比例系数辨识区间划分个数,将(q
‑
1)δ
p
记为区间q的下限边界值。
[0116]
考察n个锁相环比例系数估计值k
ppllfy
在[k
ppllmin
,k
ppllmax
]内的分布状况,并找到锁相环比例系数估计值k
ppllfy
分布量最多的锁相环比例系数辨识区间,该区间的下限边界值即为锁相环比例系数辨识结果k
ppllf
。
[0117]
图4为锁相环比例系数估计值获得锁相环比例系数辨识结果的示意图。由图4所见,249个锁相环比例系数估计值k
ppllfy
辨分布量最大的区域的下限边界为0.1941,即辨识结果k
ppllf
为0.1941。为了佐证,对结果进行了仿真,仿真中待辨识锁相环比例系数k
ppll
设置值为0.1932,锁相环比例系数辨识区间划分个数m设置为10000。
[0118]
(2)锁相环积分系数的辨识
[0119]
设锁相环积分系数辨识范围为[k
ipllmin
,k
ipllmax
],将[k
ipllmin
,k
ipllmax
]等分为σ个锁相环积分系数辨识区间,并将σ个锁相环积分系数辨识中的任意一个记为区间λ,区间λ的范围为[(λ
‑
1)δ
i
,λδ
i
],λ=1,2,...,σ,λ为锁相环积分系数辨识区间的序号,δ
i
为锁相环积分系数辨识范围划分步长,δ
i
=(k
ipllmax
‑
k
ipllmin
)/σ,σ为锁相环积分系数辨识区间划分个数,将(λ
‑
1)δ
i
记为区间λ的下限边界值。
[0120]
考察n个锁相环积分系数估计值k
ipllfy
在[k
ipllmin
,k
ipllmax
]内的分布状况,并找到锁相环积分系数估计值k
ipllfy
分布量最多的锁相环积分系数辨识区间,该区间的下限边界值即为锁相环积分系数辨识结果k
ipllf
。
[0121]
图5为锁相环积分系数估计值获得锁相环积分系数辨识结果的示意图。由图5可见,锁相环积分系数估计值k
ipllfy
分布量最大的区域的下限边界为36.37,即辨识结果k
ipllf
=36.37。为了佐证,对结果进行了仿真,仿真中待辨识锁相环积分系数k
ipll
设置值为36.41,锁相环积分系数辨识区间划分个数σ设置为100000。
[0122]
在以上步骤中,步骤5.2所述的粒子群群体最佳位置gbest的求解过程如下:
[0123]
建立粒子群优化算法函数f
o
(k
pplldy
,k
iplldy
),其表达式如下:
[0124]
f
o
(k
pplldy
,k
iplldy
)=||re(z
rpy
)
‑
re[z
ipdy
(k
pplldy
,k
iplldy
,f
y
)]|+|im(z
rpy
)
‑
im[z
ipdy
(k
pplldy
,k
iplldy
,f
y
)]||
[0125]
其中,re()表示对()中的参数取实部;im()表示对()中的参数取虚部;
[0126]
使用粒子群优化算法寻找满足要求的待估计锁相环比例系数k
pplldy
和待估计锁相
环积分系数k
iplldy
使粒子群优化算法函数f
o
(k
pplldy
,k
iplldy
)的值最小,具体步骤如下:
[0127]
步骤5.2.1,设置粒子群规模为n,粒子群优化函数变量个数d为2,粒子群优化算法学习因子1为c1,粒子群优化算法学习因子2为c2,粒子群优化算法速度权重w1,粒子群优化算法位置权重w2,粒子群优化迭代次数k,粒子速度最小值v
min
,粒子速度最大值v
max
;
[0128]
步骤5.2.2,随机生成n行2列的二维矩阵记为粒子群优化算法粒子种群x
n
×2,且第一列元素的随机数范围在锁相环比例系数辨识下限k
ppllmin
到锁相环比例系数辨识上限k
ppllmax
之间,粒子群优化算法粒子种群x
n
×2第二列元素的随机数范围在锁相环积分系数辨识下限k
ipllmin
到锁相环积分系数辨识上限k
ipllmax
之间,其中,记n行中任意一行为第a行,a=1,2,...,n,a为正整数,2列中任意一列为第b列,b=1,2,b为正整数,粒子群优化算法粒子种群x
n
×2中的任意一个粒子记为x
ab
,a=1,2,...,n,b=1,2,粒子群优化算法粒子种群x
n
×2中的任意一行粒子记为x
a
,a=1,2,...,n,任意一行粒子x
a
包含任意一行第一列的粒子x
a1
,a=1,2,...,n和任意一行第二列的粒子x
a2
,a=1,2,...,n;
[0129]
粒子群优化算法粒子种群x
n
×2和粒子群优化算法粒子种群x
n
×2中的任意一行粒子x
a
如下:
[0130][0131]
x
a
=(x
a1 x
a2
);
[0132]
随机生成n行2列的二维矩阵记为粒子群优化算法粒子速度v
n
×2,且每个元素的随机数范围在粒子速度最小值v
min
和粒子速度最大值v
max
之间,其中,粒子群优化算法粒子速度v
n
×2中的任意一个粒子速度记为v
av
,a=1,2,...,n,b=1,2,粒子群优化算法粒子速度v
n
×2中的任意一行粒子速度记为v
a
,a=1,2,...,n,任意一行粒子速度v
a
包含任意一行第一列的粒子速度v
a1
,a=1,2,...,n和任意一行第二列的粒子v
a2
,a=1,2,...,n;
[0133]
粒子群优化算法粒子速度v
n
×2和粒子群优化算法粒子速度v
n
×2中的任意一行粒子速度v
a
如下:
[0134][0135]
v
a
=(v
a1 v
a2
);
[0136]
步骤5.2.3,计算粒子群优化算法粒子种群x
n
×2中的任意一行粒子x
a
的种群适应度,记为粒子群适应度fit
a
,a=1,2,...,n,粒子群适应度fit
a
的值如下:
[0137]
fit
a
=f
o
(x
a1
,x
a2
);
[0138]
记粒子群任意一行最佳位置为pbest
a
,a=1,2,...,n,pbest
a
=(pbest
a1 pbest
a2
),其中,粒子群任意一行最佳位置第一列为pbest
a1
,a=1,2,...,n,粒子群任意一行最佳位置第二列为pbest
a2
,a=1,2,...,n,粒子群任意一行最佳位置为pbest
a
如下:
[0139]
pbest
a1
=x
a1
[0140]
pbest
a2
=x
a2
[0141]
pbest
a
=x
a
;
[0142]
寻找fit
a
中的最小值记为粒子群最小适应度fit
amin
,粒子群最小适应度fit
amin
所对应的那一行粒子,记为粒子群最小适应度行粒子x
amin
,x
amin
=(x
a1min x
a2min
),其中,x
a1min
为粒子群最小适应度行第一列粒子,x
a2min
为粒子群最小适应度行第二列粒子;
[0143]
记粒子群群体最佳位置为gbest,gbest=(gbest
1 gbest2),其中gbest1为粒子群群体最佳位置第一列,gbest2为粒子群群体最佳位置第二列,粒子群群体最佳位置为gbest如下:
[0144]
gbest1=x
a1min
[0145]
gbest2=x
a2min
[0146]
gbest=x
amin
;
[0147]
步骤5.2.4,更新粒子群优化算法粒子种群x
n
×2和粒子群优化算法粒子速度v
n
×2,并进行k次更新,记k次更新中任意一次更新为第k次更新,k=1,2,...,k,k为正整数;
[0148]
记第k次更新时的粒子群优化算法粒子种群为x
n
×
2k
,第k次更新时的粒子群优化算法粒子种群x
n
×
2k
中的任意一个粒子记为x
abk
,a=1,2,...,n,b=1,2,第k次更新时的粒子群优化算法粒子种群x
n
×
2k
中的任意一行粒子记为x
ak
,a=1,2,...,n,任意一行粒子x
ak
包含任意一行第一列的粒子x
a1k
,a=1,2,...,n和任意一行第二列的粒子x
a2k
,a=1,2,...,n,第k次更新时的粒子群优化算法粒子速度为v
n
×
2k
,第k次更新时的粒子群优化算法粒子速度v
n
×
2k
中的任意一个粒子速度记为v
abk
,a=1,2,...,n,b=1,2,第k次更新时的粒子群优化算法粒子速度v
n
×
2k
中的任意一行粒子速度记为v
ak
,a=1,2,...,n,任意一行粒子速度v
ak
包含任意一行第一列的粒子速度v
a1k
,a=1,2,...,n和任意一行第二列的粒子v
a2k
,a=1,2,...,n,k=1,2,...,k;
[0149]
第k次更新时的粒子群优化算法粒子种群x
n
×
2k
和第k次更新时的粒子群优化算法粒子种群x
n
×
2k
中的任意一行粒子x
ak
如下:
[0150][0151]
x
ak
=(x
a1k x
a2k
);
[0152]
第k次更新时的粒子群优化算法粒子速度v
n
×
2k
和第k次更新时的粒子群优化算法粒子速度v
n
×
2k
中的任意一行粒子v
ak
如下:
[0153][0154]
v
ak
=(v
a1k v
a2k
);
[0155]
第k次更新的步骤如下:
[0156]
(1)记第k次更新时的粒子群优化算法粒子速度为v
n
×
2k
,更新公式如下:
[0157]
v
ak
=w1×
v
a(k
‑
1)
+c1×
rand
×
[pbest
‑
x
a(k
‑
1)
]+c2×
rand
×
[gbest
‑
x
a(k
‑
1)
]
[0158]
其中,rand为0到1之间的随机数,k=1,2,...,k;
[0159]
当第一次更新即k=1时,v
a(k
‑
1)
=v
a0
=v
a
,xa
(k
‑
1)
=x
a0
=x
a
;
[0160]
若v
a1k
和v
a2k
中有一个大于v
max
则其值替换成v
max
,若v
a1k
和v
a2k
中有一个小于v
min
则其值替换成v
min
;
[0161]
(2)第k次更新时的粒子群优化算法粒子种群x
n
×
2k
,更新公式如下:
[0162]
x
ak
=x
a(k
‑
1)
+w2×
x
a(k
‑
1)
[0163]
其中,k=1,2,...,k;
[0164]
当第一次更新即k=1时,x
a(k
‑
1)
=x
a0
=x
a
;
[0165]
若x
a1k
和x
a2k
中有一个大于k
ppllmax
则其值替换成k
ppllmax
,x
a1k
和x
a2k
中有一个小于k
ppllmin
则其值替换成k
ppllmin
;
[0166]
(3)重新计算适应度,第k次更新时的粒子群优化算法粒子种群x
n
×
2k
任意一行粒子x
ak
,的种群适应度,记为粒子群适应度fit
ak
,a=1,2,...,n,粒子群适应度fit
ak
,的值如下:
[0167]
fit
ak
=f
o
(x
a1k
,x
a2k
)
[0168]
其中,k=1,2,...,k;
[0169]
若fit
ak
<f
o
(pbest
a1
,pbest
a2
),则pbest
a1
=x
a1k
,pbest
a2=
x
a2k
,pbest
a
=x
ak
;反之,粒子群任意一行最佳位置pbest
a
保持不变;
[0170]
寻找fit
ak
中的最小值记为第k次更新时粒子群最小适应度fit
amink
,粒子群最小适应度fit
amink
所对应的那一行粒子,记为第k次更新时粒子群最小适应度行粒子x
amink
,x
amink
=(x
a1mink x
a2mink
),其中,x
a1mink
为第k次更新时粒子群最小适应度行第一列粒子,x
a2mink
为第k次更新时粒子群最小适应度行第二列粒子;
[0171]
若fit
amink
<f
o
(gbest1,gbest2),则gbest1=x
a1mink
,gbest2=x
a2mink
,gbest=x
amink
;反之,粒子群群体最佳位置gbest保持不变;
[0172]
步骤5.2.5,输出粒子群群体最佳位置gbest。
[0173]
相对于传统的参数辨识方法因建模和扰动选择等方面的问题,无法对锁相环参数进行辨识。而本发明所提出的并网逆变器锁相环参数辨识方法,建立了并网逆变器序阻抗模型,在建模上考虑了锁相环参数的影响,使用阻抗测量的方式测量出对应频率的阻抗,使用粒子群优化算法进行参数估计,最后处理多组并网逆变器锁相环估计参数得出锁相环参数的辨识结果。本方法能够在线辨识锁相环参数,不影响系统的稳定运行,辨识出锁相环参数为系统稳定性分析提供了基础。
[0174]
综上所述,该方法实现简单,只需建立含有未知锁相环参数的正序阻抗模型使用粒子群优化算法结合测量阻抗进行参数估计,获得多组并网逆变器锁相环估计参数,处理多组并网逆变器锁相环估计参数获得参数辨识结果,具有一定可行性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1