电机控制系统及传送线的制作方法
1.本发明涉及控制系统领域,特别涉及一种电机控制系统及传送线。
背景技术:
2.随着工业自动化的发展,产品生产制造过程中的要求也越来越高,高洁净高速的无尘室传送线式加工方式越来越普及。目前vr(virtual reality,虚拟现实)产品的生产车间普遍是高洁净高速的无尘室车间,车间内传送线普遍采用滚轮式传送方式,该传送方式需要使用较多的步进电机,每个步进电机都需要单独配备电机驱动器,其线体的最高速度800mm/s,此种方式系统构成庞大、线体布线复杂、成本较高等问题。
技术实现要素:
3.本发明的主要目的是提出一种电机控制系统及传送线,旨在解决现有的多电机系统中控制系统结构复杂的问题。
4.为实现上述目的,本发明提出的电机控制系统包括:
5.主控制器;
6.第一驱动控制器,与所述主控制器电连接;
7.多个第一电机,所述第一驱动控制器分别与多个所述第一电机驱动连接;
8.第二驱动控制器,与所述第一驱动控制器电连接;以及
9.多个第二电机,所述第二驱动控制器分别与多个所述第二电机驱动连接,所述主控制器用于向所述第一驱动控制器发出控制信号,所述第一驱动控制器接收到所述控制信号时,驱动多个所述第一电机运行,并输出同步工作信号至所述第二驱动控制器,以驱动多个所述第二电机运行。
10.可选地,所述第一驱动控制器包括第一控制芯片以及与第一控制芯片电连接的第一驱动电路,所述第一控制芯片与所述主控制器电连接,所述第一驱动电路的输出端分别与多个所述第一电机驱动连接,所述第二驱动控制器与所述第一控制芯片电连接;
11.所述第一控制芯片用于接收到所述主控制器发出的控制信号后产生第一脉冲信号,所述第一驱动电路接收所述第一脉冲信号后驱动多个所述第一电机运行;所述第二驱动控制器接收所述第一脉冲信号后驱动多个所述第二电机运行。
12.可选地,所述第二驱动控制器包括第二控制芯片以及与第二控制芯片电连接的第二驱动电路,所述第二控制芯片具有第二从模式控制接口,所述第二从模式控制接口分别与所述第一控制芯片和所述第二驱动电路的输入端电连接,所述第二驱动电路的输出端分别与多个所述第二电机驱动连接;
13.所述第二驱动电路通过所述第二从模式控制接口接收所述第一脉冲信号后驱动多个所述第二电机运行。
14.可选地,所述第一驱动控制器还包括第一主从设置电路,所述第一控制芯片具有主从模式设置接口和从模式输出接口,所述第一主从设置电路与所述第一控制芯片的主从
模式设置接口连接;
15.所述第二驱动控制器还包括第二主从设置电路,所述第二控制芯片还具有主从模式设置接口,所述第二主从设置电路与所述第二控制芯片的主从模式设置接口连接;
16.所述第一控制芯片的从模式输出接口与所述第二从模式控制接口连接;
17.所述第一主从设置电路用于设置所述第一控制芯片为主模式时,所述第二主从设置电路设置所述第二控制芯片为从模式,所述第一控制芯片通过从模式输出接口输出第一脉冲信号至所述第二驱动电路的第二从模式控制接口。
18.可选地,所述第二控制芯片还与所述主控制器电连接;所述第一控制芯片还具有第一从模式控制接口,所述第一驱动电路的输入端还与所述第一从模式控制接口连接,所述第二控制芯片还具有从模式输出接口,所述第一控制芯片的第一从模式控制接口与所述第二控制芯片的从模式输出接口连接;
19.所述第二主从设置电路用于设置所述第二控制芯片为主模式时,所述第一主从设置电路设置所述第一控制芯片为从模式,所述主控制器还用于向所述第二控制芯片发出控制信号,所述第二控制芯片接收到所述控制信号后产生第二脉冲信号,所述第二驱动电路接收所述第二脉冲信号后驱动多个所述第二电机运行;所述第一驱动电路通过所述第一从模式控制接口接收所述第二脉冲信号,以驱动多个所述第一电机运行。
20.本发明还提出一种传送线,用于输送工装,包括:
21.导轨组件,沿第一方向延伸设置;
22.如上述任一项所述的电机控制系统,所述电机控制系统的多个所第一电机和多个所第二电机分别沿所述第一方向设置,且沿第二方向间隔设置,所述第二方向与所述第一方向相交;以及
23.多个滚轮,每一所述第一电机驱动连接一所述滚轮,每一所述第二电机驱动连接一所述滚轮。
24.可选地,所述传送线还包括:
25.第一传感器,设于所述导轨组件,用于检测所述导轨组件上的工装的第一位置信号,所述第一传感器与所述电机控制系统的主控制器电连接,所述主控制器接收所述第一位置信号后发出控制信号,以控制所述第一电机和所述第二电机调整至第一预设转速。
26.可选地,所述传送线还包括:
27.第二传感器,设于所述导轨组件,并与所述第一传感器间隔设置,用于检测所述导轨组件上的工装的第二位置信号,所述第二传感器与所述主控制器电连接,所述主控制器接收到所述第二位置信号后发出控制信号,以控制所述第一电机和所述第二电机以第二预设转速运转,所述第二预设转速为零转速。
28.可选地,所述主控制器控制所述第一电机和所述第二电机以第二预设转速运转预设时长后以第三预设转速继续控制所述第一电机和所述第二电机动作,所述第三预设转速大于零。
29.可选地,所述传送线还包括:
30.第三传感器,设于所述导轨组件,并位于所述第一传感器和所述第二传感器之间,用于检测所述导轨组件上的工装的第三位置信号,所述第三传感器与所述主控制器电连接,所述主控制器接收到所述第三位置信号后发出控制信号,以控制所述第一电机和所述
第二电机调整至第四预设转速,所述第四预设转速小于所述第一预设转速,并大于所述第二预设转速。
31.可选地,多个所述第一电机和多个所述第二电机的位置在所述第一方向上一一对应设置。
32.可选地,所述导轨组件包括:
33.第一导轨;以及
34.第二导轨,与所述第一导轨相对设置,多个所述滚轮分别设于所述第一导轨和所述第二导轨之间,多个所述第一电机分别设于所述第一导轨,多个所述第二电机分别设于所述第二导轨。
35.本发明技术方案通过采用第一驱动控制器驱动多个第一电机,实现多个第一电机同步运行;通过采用第二驱动控制器驱动多个第二电机,实现多个第二电机同步运行;通过第一驱动控制器向第二驱动控制器同步输出工作信号,以使一个主控制器下的第一驱动控制器和第二驱动控制器实现同步工作,进而可以实现多个第一电机和多个第二电机同时驱动,不需要每一电机单独设置驱动控制器,进而可以简化电机控制系统,减少布线,降低安装成本。
附图说明
36.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图示出的结构获得其他的附图。
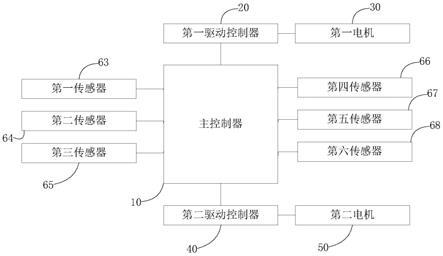
37.图1为本发明电机控制系统一实施例的结构框图;
38.图2为本发明第一驱动控制器一实施例的结构框图;
39.图3为本发明第二驱动控制器一实施例的结构框图;
40.图4为本发明传送线一实施例的结构示意图。
41.附图标号说明:
42.[0043][0044]
本发明目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。
具体实施方式
[0045]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0046]
需要说明,若本发明实施例中有涉及方向性指示(诸如上、下、左、右、前、后
……
),则该方向性指示仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
[0047]
另外,若本发明实施例中有涉及“第一”、“第二”等的描述,则该“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。另外,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本发明要求的保护范围之内。
[0048]
本发明提出一种电机控制系统,所述电机控制系统可以用于具有多电机的传送线,例如输送vr设备的传送线、输送产品的传送线等。所述电机控制系统中的电机可以用于驱动滚轮62等设备,以实现工装70或产品的定向输送。为方便描述,以下以所述电机控制系统用于输送工装70的传送线为例进行阐述。图1至4为本发明的实施例所对应的附图。
[0049]
请参阅图1,在一实施例中,所述电机控制系统包括:
[0050]
主控制器10;所述主控制器10可以为plc(programmable logic controller,可编程逻辑控制器),用于生成配置数据,以确定电机控制系统中的电机的运行参数,如电机的转速等参数。
[0051]
第一驱动控制器20,与所述主控制器10电连接;所述第一驱动控制器20用于产生脉冲信号,并将脉冲信号转换为特定的正弦波相电流。所述主控制器10配置运行参数之后,所述第一驱动控制器20接收所述运行参数数据,并根据运行参数数据确定是否产生以及产生何种频率的脉冲信号。
[0052]
多个第一电机30,所述第一驱动控制器20分别与多个所述第一电机30驱动连接;多个所述第一电机30分别用于接收所述第一驱动控制器20所产生的正弦波相电流,以使多个第一电机30可以同步运行。
[0053]
第二驱动控制器40,与所述第一驱动控制器20电连接;所述第二驱动控制器40用于驱动电机运行。所述第一驱动控制器20所产生的脉冲信号输送至所述第二驱动控制器40,所述第二驱动控制器40将脉冲信号转换为特定的正弦波相电流,以实现驱动对应的电机运行。
[0054]
多个第二电机50,所述第二驱动控制器40分别与多个所述第二电机50驱动连接,在电机控制系统运行时,所述主控制器10用于向所述第一驱动控制器20发出控制信号,所述第一驱动控制器20接收到所述控制信号时,驱动多个所述第一电机30运行,并输出同步工作信号至所述第二驱动控制器40,以驱动多个所述第二电机50运行。
[0055]
所述第一驱动控制器20可以设置第一io接口22,所述主控制器10通过所述第一io接口22与所述第一驱动控制器20电连接。所述第一驱动控制器20还可以设置第一电源转换电路28,以用于为所述第一驱动控制器20提供工作电源。所述第一驱动控制器20还可以设置第一通信接口26,以用于与上位机进行通信,所述第一通信接口26可以采用rs232接口等。所述第一驱动控制器20用于驱动多个第一电机30,第二驱动控制器40用于驱动多个第二电机50,在设置所述第一驱动控制器20时,可以在所述第一驱动控制器20设置第一id设置电路27,以用于设置第一驱动控制器20的id,所述第一id设置电路27可以采用现有的拨码开关进行灵活配置。
[0056]
在一实施例中,每一传送线上设置有多组所述第一驱动控制器20及第一电机30,也可以设置多组所述第二驱动控制器40及第二电机50,通过同一主控制器10实现多组第一电机30和多组第二电机50同步驱动。
[0057]
通过采用一个第一驱动控制器20驱动多个第一电机30,实现多个第一电机30的同步驱动,不需要在每一第一电机30上分别设置驱动器,进而可以降低控制系统的布线复杂性,减小系统体积。多个第一电机30与对应的第一驱动控制器20形成一个模块,可以方便实现模块化安装。当在传送线上安装多组电机控制系统时,可以有效降低系统的复杂性,实现快速模块化安装。在进行驱动控制时,能够有效提高驱动控制效率,降低系统控制的复杂性。由于第一驱动控制器20可以同时用于向第二驱动控制器40发出脉冲信号,以实现与第二驱动控制器40驱动连接的多个第二电机50的驱动,不需要主控制器10向第二驱动控制器40发出控制信号,进而可以简化布线成本,降低传送线成本。
[0058]
当所述电机控制系统用于同一传送线时,多个第一电机30和多个第二电机50可以用于同一导轨组件,多个第一电机30和多个第二电机50同步运行,由于第一驱动控制器20产生的脉冲信号可以直接用于驱动多个第二电机50运行,可以实现多个第一电机30和多个第二电机50的同步运行,进而可以使传送线中的双边驱动同步精度更高。
[0059]
请参阅图2和图3,在一实施例中,所述第一驱动控制器20包括第一控制芯片21以
及与第一控制芯片21电连接的第一驱动电路23,所述第一控制芯片21与所述主控制器10电连接,所述第一驱动电路23的输出端分别与多个所述第一电机30驱动连接,所述第二驱动控制器40与所述第一控制芯片21电连接;所述第一控制芯片21用于确定是否产生或产生何种脉冲信号,所述第一驱动电路23用于将脉冲信号转换为特定的正弦波相电流。
[0060]
所述主控制器10可以发出控制信号,以生成第一电机30和第二电机50的配置数据,所述第一控制芯片21用于接收到所述主控制器10发出的控制信号后产生第一脉冲信号,所述第一驱动电路23接收所述第一脉冲信号后驱动多个所述第一电机30按照配置数据运行;所述第二驱动控制器40接收所述第一脉冲信号后驱动多个所述第二电机50按照配置数据运行。第一电机30和第二电机50的配置数据相同。所述第一驱动电路23和所述第二驱动电路43可以采用现有的drv8825芯片,支持0.8a、1a、1.3a、1.5a等多个档位,也可以选取其他驱动电路。所述第二驱动控制器40作为所述第一驱动控制器20的从驱动控制器,第二驱动控制器40不需要单独产生脉冲信号,仅由第一驱动控制器20产生第一脉冲信号后,同时实现第一电机30和第二电机50驱动。通过设置主从控制,可以降低控制难度,实现第一电机30和第二电机50的同步控制,进而可以提高电机的同步性,以提升电机控制系统中的电机同步精度。
[0061]
当设置有第一io接口22、第一通信接口26、第一id设置电路27、第一电源转换电路28时,上述功能模块可以与第一控制芯片21电连接。
[0062]
请参阅图2和图3,进一步可选地,所述第二驱动控制器40包括第二控制芯片41以及与第二控制芯片41电连接的第二驱动电路43,所述第二控制芯片41具有第二从模式控制接口44,所述第二从模式控制接口44分别与所述第一控制芯片21和所述第二驱动电路43的输入端电连接,所述第二驱动电路43的输出端分别与多个所述第二电机50驱动连接;所述第一控制芯片21具有从模式输出接口,所述第二控制芯片41的第二从模式控制接口44与所述第一控制芯片21的从模式输出接口连接。所述第一控制芯片21产生第一脉冲信号,所述第二驱动电路43通过所述第二从模式控制接口44接收所述第一脉冲信号后驱动多个所述第二电机50运行。所述第二从模式控制接口44通过所述第一控制芯片21的从模式输出接口接收第一脉冲信号,第二驱动电路43不经过第二控制芯片41接收第一脉冲信号,第二驱动电路43将第一脉冲信号转换为正弦波相电流,以驱动多个第二电机50运行。
[0063]
在主控制器10向第一控制芯片21发出控制信号之后,第一控制芯片21产生第一脉冲信号,第二控制芯片41不产生脉冲信号,仅从第一控制芯片21接收第一脉冲信号,并且第二从模式控制接口44不经过第二控制芯片41,直接将第一脉冲信号转送至第二驱动电路43,以实现第二电机50的快速驱动,使第一电机30和第二电机50同步驱动。
[0064]
在一实施例中,所述第一驱动控制器20还包括第一主从设置电路25,所述第一控制芯片21具有主从模式设置接口,所述第一主从设置电路25与所述第一控制芯片21的主从模式设置接口连接;所述第一主从设置电路25用于设置所述第一控制芯片21的主从模式。
[0065]
所述第二驱动控制器40还包括第二主从设置电路45,所述第二控制芯片41还具有主从模式设置接口,所述第二主从设置电路45与所述第二控制芯片41的主从模式设置接口连接;所述第二主从设置电路45用于设置所述第二控制芯片41的主从模式。所述第一主从设置电路25将所述第一控制芯片21设置为主模式时,所述第二主从电路将所述第二控制芯片41设置为从模式。所述第一控制芯片21的从模式输出接口与所述第二从模式控制接口44
连接;所述第一主从设置电路25用于设置所述第一控制芯片21为主模式时,所述第二主从设置电路45设置所述第二控制芯片41为从模式,所述主控制器10向所述第一控制芯片21发出控制信号,以配置第一电机30和第二电机50的运行参数,所述第一控制芯片21用于产生第一脉冲信号,作为主驱动控制芯片使用;所述第二控制芯片41不产生脉冲信号,作为从驱动控制芯片使用,所述第一控制芯片21通过从模式输出接口输出第一脉冲信号至第二控制芯片41的第二从模式控制接口44。通过设置第一主从设置电路25和第二主从设置电路45,可以根据需要设置第一控制芯片21和第二控制芯片41的主从模式,当第一控制芯片21为主模式时,第二控制芯片41则为从模式,此时主控制器10仅需要向第一控制芯片21发出控制信号,以配置电机运行参数。
[0066]
通过第一主从设置电路25和第二主从设置电路45设置第一控制芯片21和第二控制芯片41的主从模式,然后根据第一控制芯片21和第二控制芯片41的主从模式确定是否向第一控制芯片21发出控制信号。所述主控制器10预存由现有控制程序,当第一控制芯片21处于主模式且第二控制芯片41处于从模式时,向第一控制芯片21发出控制信号。当第一控制芯片21处于从模式,第二控制芯片41处于主模式时,则不向第一控制芯片21发出控制信号。
[0067]
当所述第一主从设置电路25将所述第一控制芯片21设置为从模式时,所述第二主从设置电路45将所述第二控制芯片41设置为主模式,此时第一控制芯片21不产生脉冲信号。进一步可选地,所述第二控制芯片41还与所述主控制器10电连接;所述第一控制芯片21还具有第一从模式控制接口24,所述第一驱动电路23的输入端还与所述第一从模式控制接口24连接,所述第二控制芯片41还具有从模式输出接口,所述第一控制芯片21的第一从模式控制接口24与所述第二控制芯片41的从模式输出接口连接;当所述第二控制芯片41产生脉冲信号时,脉冲信号可以通过第一从模式控制接口24传送至第一驱动电路23。
[0068]
所述第二主从设置电路45用于设置所述第二控制芯片41为主模式时,所述第一主从设置电路25设置所述第一控制芯片21为从模式,所述第一控制芯片21不接受主控制器10的控制信号,不产生第一脉冲信号。所述主控制器10还用于向所述第二控制芯片41发出控制信号,所述第二控制芯片41接收到所述控制信号后产生第二脉冲信号,所述第二驱动电路43接收所述第二脉冲信号后驱动多个所述第二电机50运行;所述第一驱动电路23通过所述第一从模式控制接口24接收所述第二脉冲信号,以驱动多个所述第一电机30运行。此时所述第一控制芯片21作为从控制芯片,第二脉冲信号不经过第一控制芯片21直接传送至第一驱动电路23。
[0069]
通过设置第一主从设置电路25和第二主从设置电路45,分别对第一控制芯片21和第二控制芯片41的主从模式进行设置,以使第一控制芯片21作为主芯片时,第二控制芯片41作为从芯片,此时由第一控制芯片21接收主控制器10的控制信号,产生第一电机30和第二电机50的参数配置数据,第一控制芯片21产生第一脉冲信号,第二控制芯片41不产生脉冲信号,第一驱动电路23和第二驱动电路43均将第一脉冲信号转换为相电流,以分别驱动第一电机30和第二电机50同步运行。当第一控制芯片21作为从芯片时,第二控制芯片41作为主芯片,此时由第二控制芯片41接收主控制器10的控制信号,产生第一电机30和第二电机50的参数配置数据,第二控制芯片41产生第二脉冲信号,第一控制芯片21不产生脉冲信号,第一驱动电路23和第二驱动电路43均将第二脉冲信号转换为相电流,以分别驱动第一
电机30和第二电机50同步运行。
[0070]
所述第二驱动控制器40可以设置第二io接口42,所述主控制器10通过所述第二io接口42与所述第二驱动控制器40电连接。所述第二驱动控制器40还可以设置第二电源转换电路48,以用于为所述第二驱动控制器40提供工作电源。所述第二驱动控制器40还可以设置第二通信接口46,以用于与上位机进行通信,所述第二通信接口46可以采用rs232接口等。所述第二驱动控制器40用于驱动多个第二电机50,在设置所述第二驱动控制器40时,可以在所述第二驱动控制器40设置第二id设置电路47,以用于设置第二驱动控制器40的id,所述第二id设置电路47可以采用现有的拨码开关进行灵活配置。当设置有第二io接口42、第二通信接口46、第二id设置电路47、第二电源转换电路48时,上述功能模块可以与第二控制芯片41电连接。
[0071]
本发明通过设置第一驱动控制器20和第二驱动控制器40,并配置第一驱动控制器20和第二驱动控制器40的主从关系,实现一个主控制器10发出控制信号之后,由第一驱动控制器20或第二驱动控制器40产生脉冲信号,以同时实现多个第一电机30和多个第二电机50的驱动,不需要在每个第一电机30和每个第二电机50上均设置驱动器,简化了系统的结构,使系统能够进行模块化设计,有效提高了第一电机30和第二电机50的同步性,在用于传送线时,能够提高传送线中的滚轮62等输送设备的运行同步性。
[0072]
本发明在上述电机控制系统的基础上,还提出一种传送线的实施例。所述传送线用于输送工装70。
[0073]
请参阅图4,在一实施例中,所述传送线包括:
[0074]
导轨组件,沿第一方向延伸设置;所述第一方向可以为所述导轨组件的长度延伸方向,工装70沿所述第一方向输送。所述导轨组件上形成用于输送工装70的输送通道。
[0075]
如上述任一实施例所述的电机控制系统,所述电机控制系统的多个所第一电机30和多个所第二电机50分别沿所述第一方向设置,且沿第二方向间隔设置,所述第二方向与所述第一方向相交;所述第二方向可以为所述导轨组件的宽度方向,所述第一电机30和所述第二电机50分别设置在输送通道的两侧。如图4中所示为例,第一方向为a方向,第二方向为b方向。
[0076]
多个滚轮62,每一所述第一电机30驱动连接一所述滚轮62,每一所述第二电机50驱动连接一所述滚轮62。多个所述滚轮62设置在所述导轨组件上,多个所述滚轮62形成用于输送工装70的输送通道,当第一电机30和第二电机50运行时,每一第一电机30和第二电机50均能分别带动滚轮62转动,滚轮62上方的工装70可以在滚轮62带动下沿着第一方向输送。
[0077]
由于所述第一电机30和所述第二电机50可以通过电机控制系统的主控制器10实现同步驱动,使得多个滚轮62可以实现同步转动。通过采用上述实施例中所述的主从驱动方式,使得第一电机30和第二电机50能够尽可能提高同步精度,进而实现工装70的快速稳定输送。所述电机控制系统可以采用多个模块设计,以覆盖整个传送线,实现整个传送线通过统一主控制器10控制。当输送通道内没有工装70输送时,所述主控制器10可以发出控制信号,以配置第一电机30和第二电机50低速运行,或保持零转速状态。
[0078]
在一实施例中,所述传送线还包括第一传感器63,所述第一传感器63设于所述导轨组件,用于检测所述导轨组件上的工装70的第一位置信号,所述第一位置可以为工装70
进入输送通道时的位置,当所述第一传感器63检测到所述第一位置信号时,表示有工装70进入输送通道内。所述第一传感器63与所述电机控制系统的主控制器10电连接,所述主控制器10接收所述第一位置信号后发出控制信号,以控制所述第一电机30和所述第二电机50调整至第一预设转速。当检测到所述第一位置信号时,所述主控制器10发出控制信号,此时所述第一电机30和第二电机50可以加速到最大转速状态,以快速将工装70输送到传送线的加工位置。
[0079]
当所述主控制器10发出所述控制信号时,所述第一控制芯片21可以为主模式,对应所述第二控制芯片41为从模式,也可以为相反设置。
[0080]
进一步可选地,所述传送线还包括第二传感器64,所述第二传感器64设于所述导轨组件,并与所述第一传感器63间隔设置,用于检测所述导轨组件上的工装70的第二位置信号,当所述第二传感器64检测到工装70的第二位置信号时,说明工装70即将进入加工位置,所述第二传感器64与所述主控制器10电连接,所述主控制器10接收到所述第二位置信号后发出控制信号,以控制所述第一电机30和所述第二电机50以第二预设转速运转,所述第二预设转速为零转速。所述第一电机30和第二电机50停止运行,此时可以进行工装70的加工。所述主控制器10同时实现第一电机30和第二电机50的运行参数设定,使得第一电机30和第二电机50能够同步。
[0081]
可选地,在加工位置进行加工之后,为了将工装70输送到传送线外部,所述主控制器10控制所述第一电机30和所述第二电机50以第二预设转速运转预设时长后以第三预设转速继续控制所述第一电机30和所述第二电机50动作,所述第三预设转速大于零。所述预设时长为所述工装70在加工位置的加工时长,所述预设时长可以根据工装70的具体加工工序来确定。当工装70在加工位置停留预设时长之后,默认已完成加工,此时所述第一电机30和所述第二电机50动作,并调整至第三预设转速,以继续输送工装70。
[0082]
可选地,在第一传感器63检测到第一位置信号,第二传感器64检测到第二位置信号之前,即工装70传输到加工位置之前,当第一预设转速较大时,为了能在加工工位顺利减速至第二预设转速,可选地,所述传送线还包括第三传感器65,所述第三传感器65设于所述导轨组件,并位于所述第一传感器63和所述第二传感器64之间,用于检测所述导轨组件上的工装70的第三位置信号,当检测到所述第三位置信号时,说明当前工装70快要达到加工位置,需要对第一电机30和第二电机50进行减速,所述第三传感器65与所述主控制器10电连接,所述主控制器10接收到所述第三位置信号后发出控制信号,以控制所述第一电机30和所述第二电机50调整至第四预设转速,所述第四预设转速小于所述第一预设转速,并大于所述第二预设转速,即降低所述第一电机30和第二电机50的转速,以方便在达到加工位置之前进行减速。
[0083]
通过在检测到第三位置信号时先对第一电机30和第二电机50进行减速,可以减小工装70从第一预设转速直接减速至第二预设转速时所产生的惯性,进而可以更方便地确定工装70的位置,提高工装70的输送精度。
[0084]
在制作所述传送线时,可以在所述导轨组件上设置第四传感器66,所述第四传感器66设于第二传感器64远离第三传感器65的一端,当所述第四传感器66检测到工装70时,说明工装70即将从传送线输出。
[0085]
所述第三传感器65和第一传感器63之间还可以设置第五传感器67和第六传感器
68,以检测输送过程中的工装70。如图4所示,在一实施例中,所述导轨组件上设置三组第一驱动控制器20及对应三组第一电机30,三组第二驱动控制器40及对应三组第二电机50,同时在导轨组件的第二方向上,各设置三组传感器,每组传感器包括两个传感器单体,用于检测工装70的位置。所述工装70可以正向传输,也可以反向传输。
[0086]
为了提高工装70的稳定性,可选地,多个所述第一电机30和多个所述第二电机50的位置在所述第一方向上一一对应设置。所述工装70输送过程中,工装70在第二方向上的两端分别与滚轮62相接触,以提高工装70的稳定性。
[0087]
在一实施例中,所述导轨组件包括:
[0088]
第一导轨60;多个所述第一电机30分别设于所述第一导轨60,第一导轨60上设置有与第一电机30一一对应设置的滚轮62。
[0089]
第二导轨61,与所述第一导轨60相对设置,第一导轨60和第二导轨61之间形成输送通道,多个所述第二电机50分别设于所述第二导轨61,所述第二导轨61上设置有与第二电机50一一对应设置的滚轮62。所述第一导轨60和第二导轨61可以用于支撑第一电机30和第二电机50,并方便安装滚轮62。所述第一导轨60和/或第二导轨61上可以设置用于对工装70的边缘进行限位的凹槽,当工装70在滚轮62的带动下沿着第一方向输送时,工装70的边缘卡接在第一导轨60和/或第二导轨61上的凹槽内,以防止工装70脱落。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1