一种计及RoCoF的同步逆变器虚拟功率预同步控制方法与流程
一种计及rocof的同步逆变器虚拟功率预同步控制方法
技术领域
1.本发明涉及分布式发电微电网逆变器控制领域,特别是涉及一种计及rocof的同步逆变器虚拟功率预同步控制方法。
背景技术:
2.分布式能源接入电网的比例逐步增加,极大的缓解了传统化石能源及环境危机。逆变器作为分布式能源发电接入电网的端口,承担着交直流电能转换及离/并网切换的重要工作。与传统的同步发电机相比,由电力电子器件构成的逆变器无法持续为电网提供惯量和阻尼,对电网的安全性和稳定性带来巨大挑战。为进一步提升分布式能源发电的渗透率,借鉴同步发电机运行原理而产生的虚拟同步发电机技术(virtual synchronous generator,vsg)得到大量应用。采用vsg控制的逆变器称为同步逆变器。同步逆变器不仅具有控制灵活,响应迅速的优点,还能在并网运行时体现出良好的机械惯量和阻尼特性,为光伏、风机友好的接入电网提供了重要途径。
3.同步逆变器与传统同步发电机实现了在数学模型与工作外特性上的等效,但两者的工作方式及物理结构仍存在较大差别。与传统的同步发电机一样,同步逆变器在并网前的精确预同步控制环节必不可少,其要求快速有效的实现逆变器输出侧电压与电网侧电压幅值、频率、相位的匹配。
4.针对同步逆变器的预同步操作问题,按照相位匹配原则区分,主要分为三类。第一类解决方案是采用过零相位检测器,其在理论上能够快速有效的实现相位的一致性控制,满足逆变器预同步控制要求。但在实际应用过程中,由于电网电压的相位检测元件存在响应速度慢、过零畸变等问题,不能满足实际工程中快速有效的预同步控制要求。
5.第二类解决方案是锁相环检测,通过锁相环分别检测输出侧电压与电网侧电压的相位,然后经过比例-积分(pi)调节器实现相位的无差调节。此预同步控制环节与vsg控制相互独立,不存在耦合问题,已获得大量实际工程应用。但控制结构较为复杂,且锁相环的引入增加了系统的运行成本。
6.第三类解决方案是构建虚拟功率反馈控制环路,其无需锁相环结构,控制简单,响应迅速。但此反馈控制环路在预同步并网动态调节过程中易产生过大的频率偏差及频率变化率(the rate of change of frequency,rocof),常常会触发低频减载保护或者常规断路器跳闸,极大的降低了系统频率稳定性。
技术实现要素:
7.鉴于此,本发明提出了一种计及rocof的同步逆变器虚拟功率预同步控制方法,通过构建独立虚拟功率的预同步控制环节,避免了预同步操作与vsg控制环路之间的相互影响,快速有效的完成逆变器输出侧电压与电网侧电压幅值、频率、相位的匹配,建立预同步控制小信号模型,分析控制参数对系统的稳定性影响,并依据ieee standard 154号电网同步过程标准,以频率偏差δf、rocof与调节时间为设计指标给出参数设计流程。具体策略如
下:
8.1)给出基于虚拟功率的预同步控制结构及虚拟功率p
syn
实现相位预同步的工作原理,间接利用p
syn
的大小来判断预同步工作过程,同时利用一阶惯性延时环节及限幅环节,实现对同步逆变器相角、频率的快速调节,引入二次调压环节实现对同步逆变器幅值的调节,进而完成并网开关两侧电压完全匹配。
9.2)分析相位预同步过程调节过程,建立了预同步控制环的小信号模型,求得开环相位调节及闭环相位调节的传递函数关系,并分析主要控制参数虚拟惯性系数jv和虚拟下垂系数d
vp
对预同步控制系统稳定性的影响。
10.3)介绍并分析了预同步控制相关规定标准,借鉴ieee standard 154号电网同步过程标准,以频率偏差δf、rocof与调节时间为设计指标给出预同步控制参数jv、d
vp
的设计方案流程图。结果表明,频率偏差δf、rocof分别与预同步控制参数jv、d
vp
呈反比,预同步调节时间与参数d
vp
的大小呈反比以及jv/d
vp
的比值呈正比,过小的虚拟下垂系数d
vp
会引起频率偏差δf的变大,影响系统的带载能力,同时过小的d
vp
参数会进一步延长调节时间,故为确保相位预同步过程调节时间最少的同时使设计参数满足频率偏差δf、频率变化率rocof的性能指标,jv、d
vp
的选取应综合考虑。
附图说明
11.图1为单台并网vsg电路等效模型图;
12.图2为基于虚拟功率p
syn
的预同步控制环节框图;
13.图3为相位预同步调节示意图;
14.图4为单机预同步小信号模型;
15.图5(a)为单机预同步控制系统虚拟惯性系数jv变化时特征根变化轨迹图;
16.图5(b)为单机预同步控制系统虚拟下垂系数d
vp
变化时特征根变化轨迹图;
17.图6为不同虚拟惯性系数jv的闭环相位调节阶跃响应曲线;
18.图7为不同控制参数下的预同步调节时间曲线;
19.图8为预同步控制参数设计流程图;
具体实施方式
20.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。
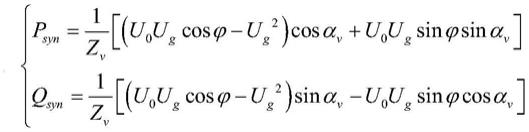
21.虚拟功率预同步控制以构建虚拟阻抗zv为的基础。以单台同步逆变器并网工作为例,其等效模型如图1所示。e为空载电压,δv为相位或功角,z为输出阻抗,为逆变器输出侧等效电压,ug∠0
°
为电网电压。假设vsg输出侧与电网之间存在一个虚拟阻抗zv,αv为虚拟阻抗角,则对应的流经虚拟阻抗的有功、无功功率为
[0022][0023]
由上式可知:当虚拟阻抗为纯电感时,即αv=90
°
,虚拟有功功率与相位差成标准
正弦关系,构建p
syn
反馈环节可实现相位同步。当虚拟阻抗呈现阻感特性时,即αv≠90
°
,在满足u0=ug的条件下构建虚拟有功功率p
syn
反馈也可实现相位的无差别追踪。当p
syn
=0 时,vsg输出侧电压与电网电压幅值、频率、相位完全一致,故可间接应用p
syn
的大小来判断预同步工作过程。
[0024]
基于虚拟功率p
syn
的预同步控制环节框图如图2所示。其中:p
set
、q
set
为功率参考给定值;pe、qe为vsg输出电磁功率;un、ug分别为vsg输出侧额定电压幅值与电网侧额定电压幅值;d
p
、dq分别为有功下垂系数和无功下垂系数;j为虚拟惯量;kq为无功调节系数;jv、d
vp
分别为虚拟惯性系数和虚拟下垂系数;kv为电压调节系数;ωs、ω分别为额定角频率和vsg输出侧角频率。功率环一的作用是来实现基本的vsg控制功能;功率环二的作用是实现精准的预同步控制,构建积分控制器(1/s)实现并网开关两侧电压幅值的调节,通过对p
syn
的反馈调节实现vsg输出侧电压与电网侧电压相位的匹配。
[0025]
在考虑初始相位差较小的情况下(即为逆变器输出侧等效电压与电网电压的相位差),虚拟功率通过直接反馈的方式进行快速预同步过程。在相位差较大时(即),采用p
syn
直接反馈的方式预同步过程时间长,故在相位差较大时增加限幅环节,可实现阶跃功率给定的方式进行相位预同步调节。图3为相位差较大时相位预同步调节示意图。图中的δω
set
为角频率偏差设定值,p
vset
为限幅环节阶跃功率给定值,常取p
vset
=d
vp
ωsδω
set
。相位预同步过程调节时间包括三部分:分别为开环相位动态调节和稳态调节时间,ts为闭环相位动态调节时间。
[0026]
单机预同步小信号模型如图4所示(忽略内环控制延时)。图中k
p
=u0ug/zv,,为系统小扰动量。
[0027]
由图4分析可知,系统开环传递函数为下式所示。
[0028][0029]
由上式分析可知,预同步控制系统为典型的i型系统,当采用阶跃功率给定的方式进行相位调节时,可实现输入信号的无差跟踪。在预同步过程中vsg输出频率保持恒定,频率扰动信号输入为0。
[0030]
单机预同步控制系统特征根变化轨迹图如图5所示。其中,由图5(a)可知,当保持虚拟下垂系数d
vp
不变,虚拟惯性系数jv不断增加,系统的特征根s1、s2将越靠近虚轴,系统的调节时间将增长,稳定性越差。由图5(b)可知,当保持jv恒定,随着d
vp
的增加,系统特征根s1、s2将逐渐变为实数,系统振荡逐渐减少,调节时间增加,稳定性提高。
[0031]
针对本专利所提出的基于虚拟功率的预同步动态调节过程中频率偏差及rocof阈值大小的取值,介绍并分析了预同步控制相关规定标准,以ieee standard 154号电网同步过程标准为例,不同容量逆变器具体标准设计规定如表1所示。rocof即为电力系统频率对时间的导数(df/dt)。如果电力系统在工作过程中rocof超过一定阈值,就会引起发电机跳闸或不必要的甩负荷,极大的降低了系统的电能质量,破坏系统的安全稳定。为此不同国家针对分布式发电单元并网的rocof均设定了最大限值。英国的典型设定值为1hz/s,爱尔兰为0.5hz/s,比利时为1hz/s,丹麦为3.5hz/s。本发明专利采用的设计标准阈值分别为δf |
max
=0.3hz,rocof|
max
=1hz/s。
[0032]
表1不同容量逆变器具体标准设计规定
[0033][0034]
为确保预同步动态调节过程中,提高系统的频率稳定性,本发明以频率偏差δf、 rocof、预同步控制调节时间为性能指标,对预同步控制单元中的虚拟惯性系数jv、虚拟下垂系数d
vp
进行设计。
[0035]
由图4分析可知,在系统开环相位预同步调节过程中,其虚拟有功功率输入与系统角频率输出的传递函数模型满足典型一阶惯性传递函数特征,如下式所示。
[0036][0037]
为保证设计参数具有普遍应用性,将其化为经典一阶惯性传递函数模型,如下所示;式中t=jv/d
vp
;k=1/ω
sdvp
。
[0038][0039]
当虚拟有功功率p
syn
输入为限幅阶跃信号p
vset
时,系统输出角频率响应为
[0040][0041]
系统输出角频率的动态时域响应解析式为
[0042]
δω
set
(t)=kp
vset
(1-e-t/t
)
[0043]
根据频率变化率rocof的设计要求进行分析可得,系统rocof表达式如下式所示。
[0044][0045]
预同步开环相位调节过程中最大频率变化率在预同步相位调节开始时刻出现,即t=0 时刻。当时,时段内的最大频率变化率大于ts时段。此时预同步控制系统最大频率变化率表达式为
[0046][0047]
根据前面所述的设计标准rocof|
max
≤1hz/s,可得预同步控制系统中虚拟惯性系数 jv的取值范围为
[0048][0049]
根据表1叙述的0~500kva逆变器并网同步过程标准规定,预同步操作过程中并网开关两侧频率差值最大为δf
max
=0.3hz,下垂系数设计标准原则为:当电网电压频率fg变化为1hz时,同步逆变器输出有功p变化率为100%,则单台同步逆变器空载运行时预同步控制虚拟下垂系数d
vp
计算公式如下所示,式中δω
max
=2π
·
δf
max
。
[0050]
[0051]
由上式和图5(b)可知,当系统的限幅阶跃功率p
vset
恒定时,系统中虚拟下垂系数d
vp
越小,则预同步过程中产生的频率偏差δf越大,其在积分控制器1/s的作用下系统的预同步调节时间越短,会导致相位预同步调节的时间降低,故系统中虚拟下垂系数d
vp
的选取不能过小,应综合考虑频率偏差与预同步控制调节时间。
[0052]
由系统的小信号模型分析可得系统的闭环相位调节过程中,系统频率输入与功率输出的传递函数模型为
[0053][0054]
由上式分析可得,闭环相位调节系统是存在零点为-d
vp
/jv的典型二阶系统,其自然角频率与阻尼比分别为:
[0055][0056]
零点的存在使得闭环控制系统的响应速度加快,调节时间减少,但系统的超调量也会增加。为直观说明惯性参数jv对相位闭环调节过程的影响,本发明采用时域动态响应进行分析,不同虚拟惯性系数jv的闭环相位调节阶跃响应曲线如图6所示。
[0057]
参数选取满足k
p
=jvωs的条件,保持虚拟下垂系数d
vp
不变,通过调节jv改变系统阻尼比ξ,阻尼比ξ与虚拟惯性系数jv呈反比。由图6可得,随着虚拟惯性系数jv的减小,阻尼比ξ不断增加,其调节时间逐步减小,系统超调量逐步降低。因此,虚拟惯性系数jv的选取不能过大。
[0058]
由图3可得,相位预同步过程调节时间可分为ts三部分。其中开环相位预同步调节时间计算公式为
[0059][0060]
然而,当预同步控制单元参数设计为欠阻尼时,即(0<ξ<1),闭环相位预同步调节时间ts最小。忽略零点影响,闭环动态响应调节时间ts如下式所示。式中:a的取值为3~4。
[0061][0062]
零点的存在会加快响应速度,减少调节时间,故相位预同步过程最大调节时间为:
[0063][0064]
由上式可知,预同步过程调节时间分别与角频率偏差设定值δω
set
、虚拟惯性系数 jv、虚拟下垂系数d
vp
息息相关。随着δω
set
的增加,频率偏差δf越大,d
vp
越小,开环相位预同步调节时间逐步降低,但过大的频率偏差会影响系统的带载能力,不满足频率偏差δf标准。随着jv减少,d
vp
的逐步增加,阻尼比ξ变大,闭环相位预同步调节时间ts逐步降低,与图6的结果保持一致。图7为不同控制参数下的预同步控制调节时间曲线,分析可得当jv越小,δω
set
较大(d
vp
较小)时,预同步控制调节时间最少。为确保相位预同步过程调节时间最少的同时使设计参数满足频率偏差δf、频率变化率rocof的性能指标,jv、 d
vp
的选取应综合考虑,具体参数设计流程图如图8所示。
[0065]
如上所述,对本发明进行了详细的说明,显然,只要实质上没有脱离本发明的发明点及效果、对本领域的技术人员来说是显而易见的变形,也均包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1