杆塔单元、架空输电线路和架空输电线路巡检的方法与流程
1.本公开涉及输电技术领域,特别涉及杆塔单元、架空输电线路和架空输电线路巡检的方法。
背景技术:
2.架空输电线路是指架设在地面之上的输电线路,包括多个杆塔以及由多个杆塔支撑的线缆,线缆包括导线和地线。为了提高架空输电线路的可靠性,可以在杆塔上安装监测设备获取杆塔的状态信息。当前,一个关键的技术问题是如何将监测设备获取到的状态信息发送至监控中心。
3.目前,一些架空输电线路中所使用的地线为光纤复合架空地线(optical fiber composite overheadground,opgw),opgw中具有光纤。而且一般来说,在每隔2-5km的距离会在杆塔部署一个opgw的光缆接头盒。因此,对于具有光缆接头盒的杆塔,可以在杆塔上部署光网络设备,并将光网络设备与光缆接头盒对接,从而实现光网络设备与opgw中的光纤对接。这样,杆塔上的监测设备获取到的状态信息能够通过光网络设备以及opgw中的光纤发送至监控中心。
4.然而,由于大部分杆塔并没有光缆接头盒,所以即使在这些杆塔上部署光网络设备,也无法与opgw中的光纤的连接,也就无法使用opgw中的光纤将状态信息发送至监控中心。
技术实现要素:
5.本公开提供了杆塔单元、架空输电线路和架空输电线路巡检的方法,杆塔单元包括机械波收发器,机械波收发器能够通过驱动线缆振动发送机械波信号,以及通过检测线缆振动接收机械波信号,从而杆塔单元能够通过机械波信号与其它杆塔单元通信。下面,对本公开提供的技术方案进行说明:
6.一方面,提供了一种杆塔单元,所述杆塔单元包括杆塔和机械波收发器;所述杆塔用于支撑线缆;所述机械波收发器用于通过驱动所述线缆振动,发送携带有所述杆塔单元的状态信息的机械波信号或其它杆塔单元的状态信息的机械波信号,或者,用于通过检测所述线缆的振动,接收携带有其它杆塔单元的状态信息的机械波信号。
7.本公开提供的技术方案,通过在杆塔单元中部署机械波收发器,使得杆塔单元之间可以通过机械波收发器收发机械波信号来互相通信。这样,不能够直接与监控中心通信的杆塔单元可以将状态信息以机械波信号的形式发送给能够与监控中心通信的杆塔单元,并由这些杆塔单元将状态信息转发至监控中心。
8.可见,采用本公开提供的杆塔单元,能够实现监控中心与所有杆塔单元之间的通信。
9.在一种可能的实现方式中,所述杆塔包括杆塔本体和绝缘子组件;所述绝缘子组件的一端与所述杆塔本体固定连接,另一端用于与所述线缆中的导线固定连接;所述机械
波收发器固定于所述绝缘子组件,所述机械波收发器用于通过所述导线收发机械波信号。
10.其中,机械波收发器固定于绝缘子组件不带电的部分。
11.本公开提供的技术方案,机械波收发器可以固定在与导线相连的绝缘子组件上,机械波收发器能够通过驱动绝缘子组件振动,来驱动导线振动,并能够通过检测绝缘子组件的振动,来检测导线的振动。
12.在一种可能的实现方式中,所述绝缘子组件包括依次连接的第一金具、绝缘子和第二金具;所述第一金具与所述杆塔本体固定连接,所述第二金具用于与所述导线固定连接;所述机械波收发器固定于所述第一金具。
13.在一种可能的实现方式中,所述杆塔属于直线杆塔,用于通过所述绝缘子组件将连续的导线拉起;所述机械波收发器为至少一个。
14.其中,直线杆塔拉起的是连续的导线,导线的振动可以越过直线杆塔振动。
15.本公开提供的技术方案,对于直线杆塔来说,通过设置一个机械波收发器就可以实现机械波信号的双向发送和双向接收。
16.在一种可能的实现方式中,所述杆塔属于耐张杆塔,用于通过第一绝缘子组件拉起所述导线的第一导线段,通过第二绝缘子组件拉起所述导线的第二导线段,所述第一绝缘子组件和所述第二绝缘子组件均为所述绝缘子组件;所述机械波收发器为至少两个,包括第一机械波收发器和第二机械波收发器,所述第一机械波收发器固定于所述第一绝缘子组件,所述第二机械波收发器固定于所述第二绝缘子组件,所述第一机械波收发器和所述第二机械波收发器电连接。
17.其中,耐张杆塔拉起的是断开的第一导线段和第二导线段,第一导线段的振动无法传输至第二导线段,第二导线段的振动也无法传输至第一导线段。
18.本公开提供的技术方案,通过上述设计,当第一导线段传输有机械波信号时,第一机械波收发器通过检测第一导线段的振动,接收机械波信号。然后,第一机械波收发器将机械波信号转换为电信号,并发送给第二机械波收发器。第二机械波收发器将电信号转换为机械波信号,并通过第二导线段发送出去。同样的,当第二导线段传输有机械波信号时,第二机械波收发器通过检测第二导线段的振动,接收机械波信号。然后,第二机械波收发器将机械波信号转换为电信号,并发送给第一机械波收发器。第一机械波收发器将电信号转换为机械波信号,并通过第一导线段发送出去。
19.可见,通过上述设计,使得机械波信号能够越过耐张杆塔传输,避免了在耐张杆塔处发生通信中断。
20.在一种可能的实现方式中,所述机械波收发器固定于所述线缆中的地线,所述机械波收发器用于通过所述地线收发机械波信号。
21.本公开提供的技术方案,由于地线不带电,所以机械波收发器还可以直接固定在地线上。
22.在一种可能的实现方式中,所述杆塔单元还包括监测设备,所述监测设备与所述机械波收发器电连接;所述监测设备用于获取所述杆塔单元的状态信息,向所述机械波收发器发送所述杆塔单元的状态信息。
23.其中,需要将自身的状态信息通过机械波收发器发送至其它杆塔单元的杆塔单元可以称为从杆塔单元。
24.本公开提供的技术方案,从杆塔单元的监测设备获取从杆塔单元的状态信息,并将从杆塔单元的状态信息发送至机械波收发器。机械波收发器将从杆塔单元的状态信息携带在生成的机械波信号中,并发送出去。
25.在一种可能的实现方式中,当所述杆塔单元为中继杆塔单元时,所述机械波收发器用于通过检测所述线缆的振动,接收携带有其它杆塔单元的状态信息的机械波信号。所述机械波收发器用于通过驱动所述线缆振动,发送携带有所述其它杆塔单元的状态信息的机械波信号。
26.在一种可能的实现方式中,所述杆塔单元还包括光网络设备,所述光网络设备与所述机械波收发器电连接;所述机械波收发器还用于向所述光网络设备发送接收到的其它杆塔单元的状态信息;所述光网络设备用于向监控中心发送所述其它杆塔单元的状态信息。
27.其中,具有光网络设备的杆塔单元可以称为主杆塔单元。
28.本公开提供的技术方案,主杆塔单元可以通过机械波收发器接收其它杆塔单元的状态信息,并将其它杆塔单元的状态信息通过光网络设备发送至监控中心。
29.在一种可能的实现方式中,所述机械波收发器生成的机械波信号的振幅可调。
30.本公开提供的技术方案,通过设置机械波收发器生成的机械波信号的振幅可调,使得当有某一杆塔单元的机械波收发器故障时,位于该杆塔单元两侧的两个杆塔单元的机械波收发器生成的机械波信号的振幅可以增大,从而这两个杆塔单元的机械波收发器可以越过故障的杆塔单元进行通信。可见,某一杆塔单元的机械波收发器的故障仅会影响自身状态信息的发送,而不会影响其它杆塔单元的状态信息的发送,不会导致整个链路断链。
31.另一方面,提供了一种架空输电线路,所述架空输电线路包括多个杆塔单元和线缆,所述多个杆塔单元支撑所述线缆;所述多个杆塔单元包括主杆塔单元和从杆塔单元,所述主杆塔单元具有光网络设备。
32.本公开提供的技术方案,从杆塔单元可以通过机械波收发器向主杆塔单元发送从杆塔单元的状态信息,主杆塔单元通过机械波收发器接收从杆塔单元的状态信息,并通过光网络设备发送至监控中心。从而,实现了监控中心与所有杆塔单元之间的通信。
33.在一种可能的实现方式中,所述从杆塔单元为多个,且多个所述从杆塔单元中的至少一部分为中继杆塔单元,其中,所述中继杆塔单元的机械波收发器用于在接收到目的地址不是所述中继杆塔单元的地址的机械波信号时,转发所述机械波信号。
34.本公开提供的技术方案,通过上述设计,使得距离较远的主杆塔单元和从杆塔单元之间的通信,可以由位于两者之间的从杆塔单元作为中继实现。
35.在一种可能的实现方式中,所述中继杆塔单元为多个,多个所述中继杆塔单元包括第一中继杆塔单元和第二中继杆塔单元,且所述第一中继杆塔单元和所述第二中继杆塔单元之间不包括其余中继杆塔单元;所述第一中继杆塔单元的机械波收发器生成的机械波信号的最远传输位置位于所述第二中继杆塔单元和所述第二中继杆塔单元的下一杆塔单元之间。
36.本公开提供的技术方案,通过上述设计,使得中继杆塔单元之间的通信更加可靠,且不会影响无关的杆塔单元。
37.在一种可能的实现方式中,任一杆塔单元的机械波收发器生成的机械波信号的最
远传输位置位于对应的中继杆塔单元和所述对应的中继杆塔单元的下一杆塔单元之间。
38.其中,杆塔单元对应的中继杆塔单元是指与该杆塔单元直接通信的中继杆塔单元。
39.另一方面,提供了一种架空输电线路巡检的方法,所述方法应用在架空输电线路巡检系统中,所述系统包括架空输电线路和监控中心,所述架空输电线路包括多个杆塔单元和线缆,多个杆塔单元包括主杆塔单元和从杆塔单元,所述主杆塔单元具有机械波收发器和光网络设备,所述从杆塔单元具有机械波收发器,所述机械波收发器用于通过所述线缆收发机械波信号,所述方法包括:第一从杆塔单元通过机械波收发器向所述主杆塔单元发送所述第一从杆塔单元的状态信息,所述第一从杆塔单元为任一从杆塔单元;所述主杆塔单元通过机械波收发器接收所述第一从杆塔单元的状态信息;所述主杆塔单元通过所述光网络设备向监控中心发送所述第一从杆塔单元的状态信息。
40.其中,主杆塔单元通过光网络设备与监控中心通信。
41.第一从杆塔单元具有监测设备,监测设备用于获取第一从杆塔单元的状态信息,并将第一从杆塔单元的状态信息发送给第一从杆塔单元的机械波收发器。
42.本公开提供的技术方案,从杆塔单元通过机械波收发器将从杆塔单元的状态信息发送至主杆塔单元,主杆塔单元通过光网络设备向监控中心发送从杆塔单元的状态信息,从而,能够实现所有从杆塔单元的状态信息发送至监控中心。可见,采用本公开提供的技术方案,能够实现监控中心与所有杆塔单元之间的通信。
43.在一种可能的实现方式中,所述第一从杆塔单元和所述主杆塔单元之间具有一个或多个中继杆塔单元,所述第一从杆塔单元通过机械波收发器向所述主杆塔单元发送所述第一从杆塔单元的状态信息,包括:所述第一从杆塔单元通过机械波收发器向相邻的中继杆塔单元发送所述第一从杆塔单元的状态信息;所述一个或多个中继杆塔单元通过机械波收发器依次接收并转发所述第一从杆塔单元的状态信息。
44.其中,所述相邻的中继杆塔单元位于第一从杆塔单元和主杆塔单元之间。
45.本公开提供的技术方案,通过设置中继杆塔单元,使得距离较远的主杆塔单元和从杆塔单元之间能够通过中继杆塔单元的逐步转发实现。
46.在一种可能的实现方式中,所述第一从杆塔单元通过机械波收发器向所述主杆塔单元发送所述第一从杆塔单元的状态信息之前,所述方法还包括:所述主杆塔单元通过机械波收发器向所述第一从杆塔单元发送获取状态信息的请求,所述请求中携带所述第一从杆塔单元的地址;所述第一从杆塔单元通过机械波收发器接收所述请求。
47.本公开提供的技术方案,通过设置从杆塔单元接收到主杆塔单元发送的获取状态信息的请求之后,从杆塔单元才向主杆塔单元发送状态信息,减少了多个从杆塔单元同时驱动线缆振动,造成线缆上传递的机械波信号混乱的现象的发生。
48.在一种可能的实现方式中,所述第一从杆塔单元和所述主杆塔单元之间具有一个或多个中继杆塔单元,所述主杆塔单元通过机械波收发器向所述第一从杆塔单元发送获取状态信息的请求,包括:所述主杆塔单元通过机械波收发器向相邻的中继杆塔单元发送所述请求;所述一个或多个中继杆塔单元通过机械波收发器依次接收并转发所述请求。
49.其中,所述相邻的中继杆塔单元位于第一从杆塔单元和主杆塔单元之间。
50.本公开提供的技术方案,通过设置中继杆塔单元,使得距离较远的主杆塔单元和
从杆塔单元之间能够通过中继杆塔单元的逐步转发实现。
51.在一种可能的实现方式中,所述第一从杆塔单元通过机械波收发器向所述主杆塔单元发送所述第一从杆塔单元的状态信息之前,所述方法还包括:所述主杆塔单元在各个从杆塔单元中确定中继杆塔单元。其中,所述中继杆塔单元用于在接收到目的地址不是所述中继杆塔单元的地址的机械波信号时,转发所述机械波信号。
52.在一种可能的实现方式中,所述第一从杆塔单元通过机械波收发器向所述主杆塔单元发送所述第一从杆塔单元的状态信息之前,所述方法还包括:所述主杆塔单元通过机械波收发器广播拓扑发现消息,所述拓扑发现消息用于指示未回复过所述主杆塔单元的杆塔单元通过机械波收发器发送回复消息;所述主杆塔单元通过机械波收发器接收回复消息,并确定接收时间最晚的回复消息对应的杆塔单元为中继杆塔单元;所述主杆塔单元转至执行通过机械波收发器广播拓扑发现消息的操作,直至满足目标条件。
53.其中,回复消息中携带有源地址和目的地址,源地址为发送回复消息的杆塔单元的地址,目的地址为主杆塔单元的地址。
54.在一种可能的实现方式中,所述目标条件包括所述主杆塔单元接收到另一主杆塔单元发送的回复消息,或者,所述主杆塔单元在通过机械波收发器广播拓扑发现消息之后的第一目标时长内,未接收到回复消息。
55.在一种可能的实现方式中,所述主杆塔单元通过机械波收发器广播拓扑发现消息之后,所述方法还包括:目标中继杆塔单元通过机械波收发器接收所述拓扑发现消息,所述目标中继杆塔单元为距所述主杆塔单元最远的中继杆塔单元;所述目标中继杆塔单元通过机械波收发器使用第一振幅的机械波信号广播所述拓扑发现消息;当所述目标中继杆塔单元在第二目标时长内未接收到回复消息时,所述目标中继杆塔单元通过机械波收发器使用振幅增大的机械波信号重新广播所述拓扑发现消息,直至所述目标中继杆塔单元接收到回复消息,或,所述目标中继杆塔单元的机械波收发器生成的机械波信号的振幅达到目标振幅。
56.在一种可能的实现方式中,当所述第一从杆塔单元故障,且所述第一从杆塔单元为中继杆塔单元时,所述方法还包括:所述主杆塔单元在位于第三中继杆塔单元的远离所述主杆塔单元的一侧的各个从杆塔单元中重新确定中继杆塔单元;其中,所述第三中继杆塔单元为位于所述主杆塔单元和所述第一从杆塔单元之间,且与所述第一从杆塔单元直接通信的中继杆塔单元。
57.本公开提供的技术方案,通过在第一从杆塔单元故障时,保留在第一从杆塔单元和主杆塔单元之间的中继杆塔单元,仅在第三中继杆塔单元远离主杆塔单元的一侧的各个从杆塔单元中重新确定中继杆塔单元,能够尽量减少因第一从杆塔单元故障导致的重新执行的拓扑发现操作的工作量。
58.在一种可能的实现方式中,当所述第一从杆塔单元故障,且所述第一从杆塔单元为中继杆塔单元时,所述方法还包括:所述主杆塔单元确定位于所述第一从杆塔单元两侧的两个从杆塔单元为新的中继杆塔单元。
59.在一种可能的实现方式中,所述两个从杆塔单元均与所述第一从杆塔单元相邻。
60.在一种可能的实现方式中,所述方法还包括:第一杆塔单元通过机械波收发器检测所述线缆的噪声频率,其中,所述第一杆塔单元为任一杆塔单元;所述第一杆塔单元控制
机械波收发器生成的机械波信号的频率避开所述噪声频率。
61.本公开提供的技术方案,第一杆塔单元通过控制生成的机械波信号的频率避开噪声频率,使得第一杆塔单元的机械波收发器生成的机械波信号受到环境的影响较小。
62.在一种可能的实现方式中,所述第一杆塔单元通过机械波收发器检测所述线缆的噪声频率之后,所述方法还包括:所述第一杆塔单元通过机械波收发器向第二杆塔单元发送频率指示消息,所述第二杆塔单元为与所述第一杆塔单元直接通信的杆塔单元,所述频率指示消息用于指示避开所述噪声频率;所述第二杆塔单元通过机械波收发器接收所述频率指示消息,控制机械波收发器生成的向所述第一杆塔单元发送的机械波信号的频率避开所述噪声频率。
63.本公开提供的技术方案,第一杆塔单元通过通知第二杆塔单元向自己发送的机械波信号的频率避开噪声频率,使得第一杆塔单元接收到的机械波信号受到环境的影响较小。
64.在一种可能的实现方式中,所述频率指示消息携带在所述第一杆塔单元通过机械波收发器发送的状态信息所在的数据包中,或,携带在所述第一杆塔单元通过机械波收发器发送的获取状态信息的请求所在的数据包中。
65.本公开提供的技术方案,通过将频率指示消息携带在状态信息所在的数据包或获取状态信息的请求所在的数据包中,使得不用占用专门的时间进行频率指示消息的发送。
66.在一种可能的实现方式中,所述频率指示消息携带在所述第一杆塔单元通过机械波收发器发送的拓扑发现消息所在的数据包中,或,携带在所述第一杆塔单元通过机械波收发器发送的回复消息所在的数据包中。
67.在一种可能的实现方式中,所述频率指示消息携带在所述第一杆塔单元通过机械波收发器发送的任何消息所在的数据包中。
68.在一种可能的实现方式中,所述主杆塔单元为多个,多个所述主杆塔单元包括第一主杆塔单元和第二主杆塔单元,所述第一主杆塔单元和所述第二主杆塔单元之间具有多个从杆塔单元,所述方法还包括:所述监控中心控制所述第一主杆塔单元检测所述第一主杆塔单元与所述多个从杆塔单元的通信状态,控制所述第二主杆塔单元检测所述第二主杆塔单元与所述多个从杆塔单元的通信状态;所述监控中心获取所述第一主杆塔单元返回的第一检测结果和所述第二主杆塔单元返回的第二检测结果;如果所述第一检测结果指示所述第一主杆塔单元与第二从杆塔单元的通信正常,且所述第一主杆塔单元与位于所述第二从杆塔单元和所述第二主杆塔单元之间的从杆塔单元的通信中断,并且,所述第二检测结果指示所述第二主杆塔单元与第三从杆塔单元的通信正常,且所述第二主杆塔单元与位于所述第三从杆塔单元和所述第一主杆塔单元之间的从杆塔单元的通信中断,则确定所述第二从杆塔单元和所述第三从杆塔单元之间的线缆中断。
69.本公开提供的技术方案,由于杆塔单元之间以通过线缆传输机械波信号的形式进行通信,所以当线缆中断时,中断处两侧的杆塔单元的通信也会中断。利用这一特性,通过检测杆塔单元之间通信状态,能够确定出线缆中断的范围。
70.另一方面,提供了一种计算机可读存储介质,所述计算机可读存储介质包括指令,当所述计算机可读存储介质在杆塔单元或监控中心上运行时,使得所述杆塔单元或监控中心执行上述架空输电线路巡检的方法。
71.另一方面,提供了一种包含指令的计算机程序产品,当所述计算机程序产品在杆塔单元或监控中心上运行时,所述杆塔单元或监控中心执行上述架空输电线路巡检的方法。
72.另一方面,提供了一种芯片,所述芯片包括可编程逻辑电路和/或程序指令,当所述芯片运行时用于实现上述架空输电线路巡检的方法。
附图说明
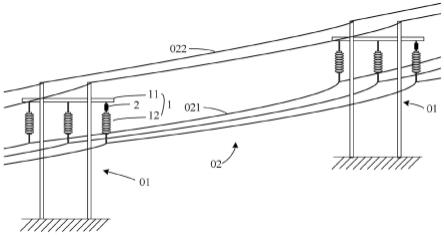
73.图1是本公开实施例提供的一种杆塔单元的示意图;
74.图2是本公开实施例提供的一种杆塔单元的示意图;
75.图3是本公开实施例提供的一种绝缘子组件的示意图;
76.图4是本公开实施例提供的一种杆塔单元的示意图;
77.图5是本公开实施例提供的一种绝缘子组件的示意图;
78.图6是本公开实施例提供的一种绝缘子组件的示意图;
79.图7是本公开实施例提供的一种杆塔单元的示意图;
80.图8是本公开实施例提供的一种杆塔单元的示意图;
81.图9是本公开实施例提供的一种杆塔单元的示意图;
82.图10是本公开实施例提供的一种杆塔单元的示意图;
83.图11是本公开实施例提供的一种机械波收发器的结构框图;
84.图12是本公开实施例提供的一种主机的结构框图;
85.图13是本公开实施例提供的一种机械波发送机的示意图;
86.图14是本公开实施例提供的一种机械波接收机的示意图;
87.图15是本公开实施例提供的一种架空输电线路巡检的方法的流程图;
88.图16是本公开实施例提供的一种架空输电线路的示意图;
89.图17是本公开实施例提供的一种架空输电线路的示意图;
90.图18是本公开实施例提供的一种架空输电线路的示意图;
91.图19是本公开实施例提供的一种拓扑发现操作的示意图;
92.图20是本公开实施例提供的一种拓扑发现操作的示意图;
93.图21是本公开实施例提供的一种拓扑发现操作的示意图;
94.图22是本公开实施例提供的一种架空输电线路的示意图;
95.图23是本公开实施例提供的一种架空输电线路中线缆中断的示意图;
96.图24是本公开实施例提供的一种架空输电线路巡检系统的网络架构图;
97.图25是本公开实施例提供的一种架空输电线路巡检系统的网络架构图。
98.图例说明
99.01、杆塔单元,011、主杆塔单元,011a、第一主杆塔单元,011b、第二主杆塔单元,012、从杆塔单元,012a、第一从杆塔单元,012b、第二从杆塔单元,012c、第三从杆塔单元,012d、第三中继杆塔单元;
100.1、杆塔;
101.11、杆塔本体,12、绝缘子组件,12a、第一绝缘子组件,12b、第二绝缘子组件;
102.121、第一金具;
103.1211a、第一挂板,1212a、第一球头挂环;
104.1211b、第一u形挂环,1212b、延长环,1213b、第二u形挂环,1214b、第一联板,1215b、第二挂板,1216b、第二球头挂环;
105.122、绝缘子;
106.123、第二金具;
107.1231a、第一碗头挂板,1232a、悬垂线夹,1233a、预绞丝护线条;
108.1231b、第二碗头挂板,1232b、第二联板,1233b、第三u形挂环,1234b、调整板,1235b、第四u形挂环,1236b、耐张线夹;
109.2、机械波收发器,2a、第一机械波收发器,2b、第二机械波收发器;
110.21、主机,211、控制器,212、第一接口部件,213、第二接口部件,214、供电部件,215、以太网mac芯片,216、rj45接口;
111.22、机械波发送机,221、第一串并转换器,222、数模转换器,223、振动部件,2231、振动件;
112.23、机械波接收机,231、检波器,232、模数转换器,233、第二串并转换器;
113.3、监测设备;
114.4、光网络设备;
115.02、线缆,021、导线,021a、第一导线段,021b、第二导线段,021c、跳线,022、地线。
具体实施方式
116.电力系统中的电厂大部分建在资源所在地,如水力发电厂建在水力资源点,火力发电厂建在煤炭、石油和其它能源的产地,而大电力的负荷中心则多集中在工业区和大城市。因而,发电厂和负荷中心往往相距很远,需要用输电线路将电能由发电厂输送至负荷中心。
117.架空输电线路是输电线路的一种,架空输电线路是指通过杆塔架设在地面之上的输电线路。架空输电线路的架设及维修比较方便,成本较低,但有时候会受到气象和环境的影响而发生故障。因此,架空输电线路需要巡检以确保可靠性。
118.架空输电线路的智能巡检指通过在杆塔上搭载监测设备,并通过一种或多种通信方式,将监测设备获取的状态信息传输到监控中心进行信息汇总处理的巡检方式。当前,架空输电线的智能巡检主要的挑战在于如何构建一个网络,以实现监控中心与所有杆塔之间的通信,实现所有杆塔的状态信息均能够传输至监控中心。
119.目前,一些架空输电线路中使用的地线为光纤复合架空地线(optical fiber composite overheadground,opgw),一般来说,opgw在每隔2-5km的距离会有一个光缆接头盒,光缆接头盒安装在杆塔上。因此,对于这类杆塔(可以称为主杆塔),可以在杆塔上部署光网络设备,并将光网络设备与光缆接头盒连接,以将光网络设备与opgw中的光纤的连接。从而,该杆塔上的监测设备获取到的状态信息能够通过opgw中的光纤发送至监控中心。
120.然而,大部分杆塔(可以称为从杆塔)并没有部署光缆接头盒,所以即使在这些杆塔上部署光网络设备,光网络设备也无法与opgw中的光纤连接,也无法使用opgw中的光纤将监测设备获取到的状态信息发送至监控中心。并且,有些情况下,虽然杆塔具有光缆接头盒,然而由于使用权限的原因,也不能使用opgw中的光纤。
121.因此,对于无法采用光纤通信手段的杆塔,如何实现与监控中心的通信是一个关键的技术问题。
122.相关技术中提出了以下两种方式来解决监控中心与杆塔的通信问题:
123.第一种方式,采用运营商网络实现监控中心与杆塔之间的通信。具体的,在杆塔上部署用户前置设备(customerpremise equipment,cpe),cpe与监测设备电连接,且cpe能够通过运营商网络与监控中心通信。因此,只要运营商的信号可以覆盖,则杆塔的cpe就能够通过运营商网络将监测设备获取到的状态信息发送给监控中心。
124.然而,采用第一种方式存在以下技术问题:
125.第一,信号覆盖的问题。由于架空输电线路很可能穿越无人区,而无人区的信号覆盖情况较差,所以位于无人区的杆塔上的cpe很可能无法连接运营商网络。
126.第二,成本较高的问题。架空输电线路包括的杆塔数量众多,需要部署大量的cpe。而且,电力公司需要不断向运营商缴纳通信费用。
127.第三,安全性较低的问题。由于运营商网络是民用通信网络,所以与工业级别的专用网相比安全级别相对较低。采用运营商的公网传输架空输电线路的信息,存在一定的安全风险。
128.第二种方式,采用无线通信技术作为无光缆接头盒的杆塔(可以称为从杆塔)到有光缆接头盒的杆塔(可以称为主杆塔)之间的通信方式。其中,这些无线通信方式包括微波、无线(wireless fidelity,wifi)、紫蜂协议(zigbee)和射频(radio frequency,rf)等。
129.以wifi为例,在杆塔上部署wifi设备,从杆塔的状态信息通过wifi设备发送至主杆塔的wifi设备上,再由主杆塔上的光网络设备通过opgw中的光纤将状态信息发送至监控中心。并且,当某一从杆塔和主杆塔相距较远时,该从杆塔上的状态信息可以通过其余从杆塔的wifi设备作为中继逐步转发至主杆塔。
130.然而,采用第二种方式存在以下技术问题:
131.第一,天线的对准问题。天线安装在杆塔上,需要方向性对准,而由于受到重力、震动和风力等因素的持续影响,安装后的天线会出现位移。
132.第二,断链的问题。当作为中继的某一从杆塔上的无线通信设备故障时,其余需要该从杆塔上的无线通信设备转发状态信息的从杆塔均无法将状态信息发送至主杆塔。
133.第三,视距遮挡的问题。当天线直线距离(视距)之间出现遮挡的时候,信号衰减甚至中断。这些遮挡物比如沙尘暴,或者生长到天线的菲涅尔区的树木等。
134.第四,杆塔维护的问题。采用无线通信技术涉及高级编码和调制技术,比如正交幅度调制(quadrature amplitude modulation,qam)1024,系统相对复杂,需要维护的概率更大。
135.鉴于上述技术问题,本公开实施例提供了杆塔单元、架空输电线路和架空输电线路巡检的方法。
136.本公开实施例提供了一种杆塔单元01,如图1所示,杆塔单元01包括杆塔1和机械波收发器2。杆塔1用于支撑线缆02。机械波收发器2用于通过驱动线缆02振动,发送机械波信号,以及,通过检测线缆02的振动,接收机械波信号。
137.这样,从杆塔单元012能够通过机械波收发器2实现与主杆塔单元011的通信,而主杆塔单元011能够与监控中心通信。因此,采用本公开实施例提供的杆塔单元01能够实现监
控中心与所有杆塔单元01直接或间接的通信。其中,主杆塔单元011是指能够直接与监控中心通信的杆塔单元01,如具有光网络设备4的杆塔单元01。从杆塔单元012是指不能够直接与监控中心通信的杆塔单元01,如不具有光网络设备4的杆塔单元01。
138.并且,通过机械波收发器2来实现主杆塔单元011和从杆塔单元012之间的通信,至少具有以下有益效果:
139.第一,适用的场景更加广泛。无论任何场景,只要杆塔1上部署了机械波收发器2就能够实现杆塔单元01与监控中心的通信。
140.第二,成本较低。机械波收发器2的成本相较于cpe和无线通信设备等均较低,且不需要缴纳通信费用。
141.第三,安全性较高。机械波通信网络为工业级别的专用网,安全级别较高,信息泄露的风险较低。
142.第四,不存天线的对准问题。
143.第五,断链发生的可能性较低。当作为中继的某一杆塔单元01上的机械波收发器2发生故障时,位于该杆塔单元01两侧的两个杆塔单元01上的机械波收发器2可以通过增大生成的机械波信号的振幅的方式,越过故障的机械波收发器2直接通信。
144.第六,不存在天线的视距遮挡的问题。
145.第七,机械波收发器2的维护概率较低。采用机械波通信技术可以采用较为简单的编码和调制技术,比如开关键(on-off-keying,ook)调制,系统相对简单,一般来说越简单的系统,需要维护的概率越低。
146.如图1所示,杆塔1所支撑的线缆02包括导线021和地线022。
147.其中,导线021是用来传导电流、输送电能的元件。地线022还可以称为避雷线,主要作用是减少雷击导线021的机会,提高耐雷水平,减少雷击跳闸次数,保证线路安全送电。在一些示例中,地线022为opgw。
148.本公开实施例提供的机械波收发器2可以通过导线021的振动收发机械波信号,也可以通过地线022的振动收发机械波信号,本公开实施对此不做限定。
149.下面,分别对这两种情况下,机械波收发器2的位置进行说明:
150.在一些示例中,如图1所示,机械波信号可以通过导线021的振动传输,则机械波收发器2需要与导线021传动连接,以使得机械波收发器2能够驱动导线021振动并能够检测导线021的振动。
151.由于导线021带有高压电,所以机械波收发器2不适合直接固定在导线021上。在一些示例中,机械波收发器2可以固定在杆塔1的绝缘子组件12上。如图2所示,杆塔1包括杆塔本体11和绝缘子组件12。绝缘子组件12的一端与杆塔本体11固定连接,另一端用于与线缆02中的导线021固定连接。机械波收发器2固定于绝缘子组件12。
152.示例性的,如图2所示,绝缘子组件12包括依次连接的第一金具121、绝缘子122和第二金具123。第一金具121与杆塔本体11固定连接,第二金具123用于与导线021固定连接。
153.导线021的高压电传输至第二金具123之后,被绝缘子122阻绝,因此,第一金具121不带电,机械波收发器2可以固定在第一金具121上。
154.杆塔1可以分为直线杆塔和耐张杆塔两类。其中,如图1所示,直线杆塔拉起的是连续的导线021,导线021在直线杆塔处不会发生中断。如图4所示,耐张杆塔拉起的是断开的
导线021,导线021在耐张杆塔处分为第一导线段021a和第二导线段021b,耐张杆塔分别通过两个绝缘子组件12拉起第一导线段021a和第二导线段021b,且第一导线段021a和第二导线段021b通过跳线021c电连接。
155.对于不同类型的杆塔1来说,所使用的绝缘子组件12的具体结构也是不同的。
156.下面,分别以应用在直线杆塔和耐张杆塔中的绝缘子组件12为例,对机械波收发器2的具体位置进行更加详细的示例性说明:
157.在一些示例中,绝缘子组件12应用在直线杆塔中。如图3所示,第一金具121包括依次连接的第一挂板1211a和第一球头挂环1212a。第一挂板1211a与杆塔本体11连接,第一球头挂环1212a与绝缘子122连接。机械波收发器2可以固定在第一挂板1211a上,且可以通过第一挂板1211a上的工艺孔固定。
158.第二金具123包括依次连接的第一碗头挂板1231a、悬垂线夹1232a和预绞丝护线条1233a。第一碗头挂板1231a与绝缘子122连接,预绞丝护线条1233a与导线021连接。
159.在另一些示例中,绝缘子组件12应用在耐张杆塔中。如图5和图6所示,第一金具121包括依次连接的第一u形挂环1211b、延长环1212b、第二u形挂环1213b、第一联板1214b、第二挂板1215b和第二球头挂环1216b。其中,第一u形挂环1211b与杆塔本体11连接,第二球头挂环1216b与绝缘子122固定连接。机械波收发器2可以固定在第一联板1214b上,且通过第一联板1214b上的工艺孔固定。
160.第二金具123包括依次连接的第二碗头挂板1231b、第二联板1232b、第三u形挂环1233b、调整板1234b、第四u形挂环1235b和耐张线夹1236b。其中,第二碗头挂板1231b与绝缘子122固定连接,耐张线夹1236b与导线021固定连接。
161.另外,对于不同类型的杆塔1来说,所需要配合使用的机械波收发器2的数量也是不同的。
162.如图1所示,对于直线杆塔来说,由于拉起的是连续的导线021,所以导线021的振动在直线杆塔处不会发生中断,而是会越过直线杆塔进行传递。因此,在直线杆塔处部署一个机械波收发器2就能够实现机械波信号的双向发送和接收。
163.如图4所示,对于耐张杆塔来说,耐张杆塔用于通过第一绝缘子组件12a拉起第一导线段021a,通过第二绝缘子组件12b拉起第二导线段021b。第一绝缘子组件12a和第二绝缘子组件12b均为绝缘子组件12。第一导线段021a和第二导线段021b通过跳线021c实现电连接。
164.导线021的振动在耐张杆塔处会发生中断,也即,第一导线段021a的振动不会传递至第二导线段021b,第二导线段021b的振动也不会传递至第一导线段021a。
165.为了避免机械波信号在耐张杆塔处发生中断,机械波收发器2为至少两个,包括第一机械波收发器2a和第二机械波收发器2b,第一机械波收发器2a固定于第一绝缘子组件12a,第二机械波收发器2b固定于第二绝缘子组件12b,第一机械波收发器2a和第二机械波收发器2b电连接。
166.这样,在第一导线段021a上传输的机械波信号被第一机械波收发器2a接收之后,第一机械波收发器2a将接收到的机械波信号转换为电信号,然后发送给第二机械波收发器2b。第二机械波收发器2b接收电信号,将电信号转换为机械波信号,并通过第二导线段021b发送出去。
167.同样的,在第二导线段021b上传输的机械波信号被第二机械波收发器2b接收之后,第二机械波收发器2b将接收到的机械波信号转换为电信号,然后发送给第一机械波收发器2a。第一机械波收发器2a接收电信号,将电信号转换为机械波信号,并通过第一导线段021a发送出去。
168.可见,通过在耐张杆塔上设置第一机械波收发器2a和第二机械波收发器2b,实现了机械波信号从耐张杆塔的一侧传输至另一侧。
169.在一些示例中,如图7所示,机械波收发器2除了可以固定在绝缘子组件12上之外,机械波收发器2还可以固定在线缆02中的地线022(地线022不带电)上,机械波收发器2还可以通过地线022收发机械波信号。
170.为了更好的理解本公开实施例提供的杆塔单元01,下面,分别以杆塔单元01为从杆塔单元012和主杆塔单元011,对杆塔单元01的具体功能进行说明,其中,主杆塔单元011能够与监控中心直接通信,从杆塔单元012需要借助主杆塔单元011与监控中心通信。
171.从杆塔单元012:
172.如图8所示,从杆塔单元012还可以包括监测设备3,监测设备3与机械波收发器2电连接。监测设备3用于获取从杆塔单元012的状态信息,向机械波收发器2发送从杆塔单元012的状态信息。机械波收发器2用于通过驱动线缆02振动发送携带有从杆塔单元012的状态信息的机械波信号。
173.其中,监测设备3可以为传感器和摄像设备等。在一些示例中,传感器可以为杆塔倾斜检测传感器和温度传感器等。
174.监测设备3获取到从杆塔单元012的状态信息之后,可以将状态信息以电信号的形式发送给机械波收发器2。机械波收发器2将电信号转换成机械波信号,并通过线缆02发送出去。当该机械波信号被主杆塔单元011接收到之后,主杆塔单元011将机械波信号中携带的从杆塔单元012的状态信息发送给监控中心。
175.由于机械波信号携带的数据量较少,所以当监测设备3获取到的状态信息的数据量较大时,可以对状态信息进行处理,减少状态信息包括的数据量,然后将处理后的状态信息携带在机械波信号中。其中,对状态信息处理的操作可以由监测设备3执行,也可以由机械波收发器2执行,本公开实施例对此不做限定。
176.举例来说,当监测设备3为摄像设备时,摄像设备获取到的为视频信息,而机械波信号无法传输视频,则摄像设备或机械波收发器2可以对视频进行分析,然后将分析得到的结果以机械波信号的形式发送出去。在一些示例中,该分析得到的结果可以为杆塔是否倾斜、杆塔处的温度、杆塔附近的树木的高度以及杆塔处是否发生火灾等。
177.需要说明的是,杆塔单元01也可以不包括监测设备3。举例来说,在一些示例中,当两个杆塔单元01相距很近时,可以只在一个杆塔单元01上部署监测设备3,且该监测设备3用于监控两个杆塔单元01的状态信息,则另一个杆塔单元01上可以不部署监测设备3。在另一些示例中,也可以仅在故障率高的杆塔单元01上部署监测设备3,而在故障率很低的杆塔单元01上可以不部署监测设备3。示例性的,可以在无人区的杆塔单元01上部署监测设备3,而在其余区域可以不部署监测设备3。
178.当然,也可以是在架空输电线路中所有的杆塔单元01均部署监测设备3,这样能够实现所有杆塔单元01巡检的自动化。
179.另外,从杆塔单元012中的机械波收发器2还可以用于转发接收到的其它杆塔单元的状态信息。也即,从杆塔单元012中的机械波收发器2还用于作为中继,实现其它从杆塔单元012和主杆塔单元011之间的通信。
180.具体的,机械波收发器2还用于通过检测线缆02的振动,接收携带有其它杆塔单元的状态信息的机械波信号。机械波收发器2还用于通过驱动线缆02振动,发送携带有其它杆塔单元的状态信息的机械波信号。
181.在一些示例中,从杆塔单元012的机械波收发器2除了用于向主杆塔单元011(监控中心)发送状态信息之外,还可以接收主杆塔单元011的机械波收发器2发送的指示消息。
182.在一些示例中,从杆塔单元012的机械波收发器2用于通过检测线缆02的振动,接收携带有获取状态信息的请求的机械波信号。当从杆塔单元012的机械波收发器2接收到携带有获取状态信息的请求的机械波信号之后,再发送携带有状态信息的机械波信号。
183.在一些示例中,杆塔单元01还包括执行设备,执行设备与机械波收发器2电连接。机械波收发器2用于通过检测线缆02的振动,接收携带有指示消息的机械波信号。执行设备用于执行该指示消息指示的操作。其中,执行设备可以为告警设备和线缆破冰机器人等,指示消息可以为用于指示告警设备告警或指示线缆破冰机器人破冰等。
184.主杆塔单元011:
185.如图9所示,主杆塔单元011还包括光网络设备4,光网络设备4与机械波收发器2电连接。机械波收发器2用于通过检测线缆02的振动,接收携带有其它杆塔单元的状态信息的机械波信号,向光网络设备4发送其它杆塔单元的状态信息。光网络设备4用于向监控中心发送其它杆塔单元的状态信息。
186.光网络设备4可以为光线路终端(optical line termination,olt)、光网络单元(optical networkunit,onu)、光传送网(optical transport network,otn)设备、交换机和路由器等。光网络设备4可以与opgw中的光纤连接。
187.在一些示例中,主杆塔单元011通过光网络设备4和opgw与监控中心通信。
188.在一些示例中,如图10所示,主杆塔单元011也可以包括监测设备3,监测设备3与光网络设备4电连接。监测设备3用于获取主杆塔单元011的状态信息。光网络设备4用于向监控中心发送主杆塔单元011的状态信息。
189.与从杆塔单元012中的监测设备3不同,由于主杆塔单元011包括光网络设备4,所以主杆塔单元011的监测设备3可以直接将获取到的状态信息发送至光网络设备4,并由光网络设备4直接传输至监控中心,而并不需要将获取到的状态信息以机械波信号的形式发送给其它杆塔单元01。
190.另外,由于主杆塔单元011的监测设备3获取的状态信息能够直接通过光网络设备4向监控中心发送,所以,主杆塔单元011的状态信息可以更加丰富和完整。在一些示例中,当监测设备3为摄像设备时,光网络设备4可以将监测设备3获取到的完整的监控视频传输至监控中心。
191.本公开实施例对机械波收发器2的具体结构不做限定,下面,提供一种机械波收发器2可能的实现形式:
192.在一些示例中,如图11所示,机械波收发器2包括主机21、机械波发送机22和机械波接收机23。主机21分别与机械波发送机22、机械波接收机23电连接。
193.在一些示例中,主机21与机械波发送机22和机械波接收机23分离设计。这样,机械波发送机22和机械波接收机23的安装位置不受主机21限制。例如,主机21可以安装在杆塔本体11上,机械波发送机22和机械波接收机23可以安装在绝缘子组件12或地线022上。
194.在另一些示例中,主机21与机械波发送机22、机械波接收机23一体化设计。这样,机械波收发器2中连接点较少,减少了连接点发生故障的可能性,机械波收发器2可靠性较高。
195.下面,对主机21进行示例性说明:
196.在一些示例中,如图12所示,主机21包括控制器211、第一接口部件212、第二接口部件213和供电部件214。
197.控制器211可以包括中央处理单元(central processing unit,cpu)最小单元,cpu最小单元包括时钟、电源、只读存储器(read onlymemory image,rom)、随机存取存储器(random-access memory,ram)和存储芯片。cpu可以提供通用输入输出(general-purpose input/output,gpio),gpio可以接入开关量传感器。
198.第一接口部件212用于与机械波发送机22电连接,第一接口部件212可以为通用异步收/发器(universal asynchronous receiver/transmitter,uart)串口。
199.第二接口部件213用于与机械波接收机23电连接,第二接口部件213可以为通用异步收/发器(universal asynchronous receiver/transmitter,uart)串口。
200.供电部件214用于为机械波收发器2供电。在一些示例中,供电部件214可以为太阳能供电部件。在另一些示例中,供电部件214为接口部件,用于与太阳能供电部件电连接。
201.另外,对于主杆塔单元011上的机械波收发器2来说,机械波收发器2还需要与光网络设备4连接。因此,机械波收发器2还可以包括用于与光网络设备4连接的以太网接口部件。
202.在一些示例中,主机1与监测设备3电连接,例如,通过以太网接口部件与监测设备3连接。
203.在一些示例中,如图11所示,以太网接口部件包括以太网媒体接入控制(mediaaccess control,mac)芯片215和rj45(registeredjack45)接口216。
204.主机21(控制器211)还用于进行调制编码以及解调译码。本公开实施例对主机21采用的调制方式不做限定,在一些示例中,可以采用调幅方式的开关键(on-off-keying,ook)方式调制,载波在二进制调制信号控制下通断。另外,除了ook调制方式,还可以采用其它调制方式,包括相移键控(phase shiftkeying,psk)、频移键控(frequency shiftkeying,fsk)、正交幅度调制(quadrature amplitude modulation,qam)、正交频分复用(orthogonal frequency divisionmultiplexing,ofdm)、不归零码(notreturn to zero,nrz)和莫尔斯码等调制方式。
205.下面,对机械波发送机22进行示例性说明:
206.在一些示例中,如图13所示,机械波发送机22包括第一串并转换器221、数模转换器(digital-to-analog converter,dac)222和振动部件223。
207.第一串并转换器221用于将主机21发送的串行信号转换为并行信号。
208.数模转换器222用于将数字信号转换为模拟信号。
209.振动部件223用于基于输入的信号驱动线缆02振动,以发送机械波信号。振动部件
223可以为振动马达、扬声器以及通过继电器控制的声音波片(如图13所示)等。振动部件223与绝缘子组件12或地线022固定连接。
210.本公开实施例提供的振动部件223的振动频率可以在0-11000hz调整,从而,通过对振动部件223振动频率的控制,能够避开噪声频率。
211.在一些示例中,如图13所示,振动部件223包括多个振动件2231,多个振动部件2231可以工作在不同的频率,从而在同一线缆02上能够同时传输多个不同频率的机械波信号,实现了传输效率的提高。
212.在一些示例中,振动部件233包括多个振动件2231,该多个振动件2231的振幅不同,从而使机械波收发器2生成的机械波信号的振幅可以调整。
213.另外,当振动部件223采用扬声器时,振动部件223发出的是可被人耳感知的声音,容易通过空气传播到周边环境中,出现信号泄露,影响耦合效率。则在一些示例中,可以将扬声器的鼓膜放置在一个封闭腔体里面,腔体连接线缆02,腔体中的声音振动高效率的耦合到线缆02中,减少声音泄露。
214.可以理解的是,在机械波发送机22中也可以不包括第一串并转换器221。
215.下面,对机械波接收机23进行示例性说明:
216.在一些示例中,如图14所示,机械波接收机23包括检波器231、模数转换器(analog-to-digital converter,adc)232和第二串并转换器233。
217.检波器231能够将机械波信号转换为相应的电信号。检波器231(或称为机械波检波器)可以为振动传感器,也可以为麦克风(microphone)。在一些示例中,振动传感器可以包括位移传感器、速度传感器和加速度传感器(也称为加速度计)中的至少一种。其中,位移传感器适用于低频测量,速度传感器适用于中频测量,加速度传感器适用于中高频测量。
218.检波器231固定在绝缘子组件12或地线022上,可以检测出导线021或地线022中的微小振动。为了方便,可以采用磁座将检波器231吸附在绝缘子组件122或地线022上。当检波器231采集的电信号很弱时,可以对信号进行放大和降噪处理,再通过模数转换器232进行模数转换。
219.模数转换器232用于将模拟信号转换为电信号。第二串并转换器233用于将并行的电信号转换为串行的电信号,并发送给主机21。
220.可以理解的是,在机械波接收机23中也可以不包括第二串并转换器233。
221.本公开实施例还提供了一种架空输电线路,如图1所示,架空输电线路包括多个杆塔单元01和线缆02,多个杆塔单元01支撑线缆02。
222.在一些示例中,架空输电线路还包括杆塔基础、拉线和接地装置等。
223.在一些示例中,如图16-图23所示,多个杆塔单元01包括主杆塔单元011和从杆塔单元012,主杆塔单元011为包括光网络设备4的杆塔单元01。
224.本公开实施例提供的技术方案,从杆塔单元012能够通过机械波收发器2向主杆塔单元011的机械波收发器2发送从杆塔单元012的状态信息,主杆塔单元011的机械波收发器2接收从杆塔单元012的状态信息,并通过光网络设备4发送至监控中心。可见,本公开实施例提供的架空输电线路中的杆塔单元01均能够与监控中心通信。
225.在一些示例中,从杆塔单元012为多个,且多个从杆塔单元012中的至少一部分为中继杆塔单元。
226.其中,中继杆塔单元中的机械波收发器2用于在接收到目的地址不是本中继杆塔单元的地址的机械波信号时,转发该机械波信号。
227.对于非中继杆塔单元中的机械波收发器2来说,当接收到目的地址不是本杆塔单元的地址的机械波信号时,并不会转发机械波信号。
228.如图16-图23所示,方形框的从杆塔单元012为中继杆塔单元,圆形框的从杆塔单元012为非中继杆塔单元。在一些示例中,所有的从杆塔单元012均为中继杆塔单元。在另一些示例中,如图16所示,一部分从杆塔单元012为中继杆塔单元,且相邻两个中继杆塔单元之间包括一个或多个从非中继杆塔单元。
229.本公开实施例提供的技术方案,通过设置至少一部分从杆塔单元012为中继杆塔单元,使得从杆塔单元012与主杆塔单元011的距离较远时,可以通过位于两者之间的中继杆塔单元作为中继进行机械波信号的转发,以实现两者的通信。
230.在一些示例中,中继杆塔单元为多个,多个中继杆塔单元包括第一中继杆塔单元和第二中继杆塔单元,且第一中继杆塔单元和第二中继杆塔单元之间不包括其余中继杆塔单元。第一中继杆塔单元的机械波收发器2生成的机械波信号的最远传输位置位于第二中继杆塔单元和第二中继杆塔单元的下一杆塔单元01之间。
231.这样,既能够保证第一中继杆塔单元的机械波收发器2和第二中继杆塔单元的机械波收发器2之间的通信的可靠性,也避免了能量的浪费。
232.本公开实施例提供的技术方案,确定第一中继杆塔单元的机械波收发器2生成的机械波信号的振幅的过程可以如下所述:
233.第一中继杆塔单元逐渐提升机械波收发器2生成的机械波信号的振幅,并广播消息。当接收到第二中继杆塔单元回复的消息时,记录对应的振幅为a1。继续提升机械波信号的振幅,并继续广播消息,直至接收到第二中继杆塔单元的下一杆塔单元01回复的消息,记录对应的振幅为a2。则第一中继杆塔单元生成的机械波信号的振幅可以设置在a1和a2之间,示例性的,可以为a1+(a2-a1)
×
0.5。
234.在一些示例中,每个杆塔单元01的机械波收发器2生成的机械波信号的最远传输位置位于对应的中继杆塔单元和对应的中继杆塔单元的下一杆塔单元01之间。
235.本公开实施例提供了一种架空输电线路巡检的方法,该方法应用在架空输电线路巡检系统中,该系统包括监控中心和架空输电线路,如图15所示,该方法包括:
236.在步骤1501中,第一从杆塔单元012a通过机械波收发器2向主杆塔单元011发送第一从杆塔单元012a的状态信息。
237.其中,第一从杆塔单元012a为任一从杆塔单元012,且第一从杆塔单元012a可以具有监测设备3。状态信息携带在机械波信号中,状态信息中携带的目的地址为主杆塔单元011的地址。
238.本公开实施例提供的技术方案,第一从杆塔单元012a的监测设备3获取到第一从杆塔单元012a的状态信息之后,将状态信息以电信号的形式发送给第一从杆塔单元012a的机械波收发器2。然后,机械波收发器2将状态信息转换为机械波的形式,并通过线缆02发送出去。
239.在一些示例中,如图16所述,第一从杆塔单元012a和主杆塔单元011之间不具有中继杆塔单元,则第一从杆塔单元012a发送的状态信息直接发送至主杆塔单元011。
240.在一些示例中,如图17所示,第一从杆塔单元012a和主杆塔单元011之间具有一个或多个中继杆塔单元,则第一从杆塔单元012a通过机械波收发器2发送的第一从杆塔单元012a的状态信息,由这一个或多个中继杆塔单元通过机械波收发器2依次接收并转发,直至到达主杆塔单元011。
241.本公开实施例对第一从杆塔单元012a通过机械波收发器2发送状态信息的触发条件不做限定。
242.在一些示例中,第一从杆塔单元012a可以定期向主杆塔单元011上报状态信息。也即,当达到目标周期时,第一从杆塔单元012a通过机械波收发器2发送第一从杆塔单元012a的状态信息。对于这种情况,为了避免同时有多个从杆塔单元012的机械波收发器2在线缆02上发送机械波信号,可以设置各个从杆塔单元012上报状态信息的时刻错开。
243.在一些示例中,第一从杆塔单元012a也可以在监测设备3监测到第一从杆塔单元012a处于异常状态时,向主杆塔单元011发送状态信息。
244.在一些示例中,如图18所示,第一从杆塔单元012a还可以是在接收到主杆塔单元011获取状态信息的请求之后,才向主杆塔单元011发送携带有状态信息的机械波信号。
245.主杆塔单元011通过机械波收发器2向第一从杆塔单元012a发送获取状态信息的请求,请求中携带第一从杆塔单元012a的地址。第一从杆塔单元012a通过机械波收发器2接收获取状态信息的请求,识别到请求中携带有第一从杆塔单元012a的地址,则通过机械波收发器2发送第一从杆塔单元012a的状态信息。
246.示例性的,第一从杆塔单元012a通过机械波收发器2接收携带有获取状态信息的请求的机械波信号。然后,将该机械波信号转换成电信号,识别该请求的地址。如果该地址为第一从杆塔单元012a的地址,则第一从杆塔单元012a通过机械波收发器2发送第一从杆塔单元012a的状态信息。
247.在一些示例中,如图18所示,第一从杆塔单元012a和主杆塔单元011之间具有一个或多个中继杆塔单元,则主杆塔单元011通过机械波收发器2发送的获取状态信息的请求,由该一个或多个中继杆塔单元通过机械波收发器2依次接收并转发,直至第一从杆塔单元012a接收到该获取状态信息的请求。
248.在一些示例中,为了避免同时有多个杆塔单元01的机械波收发器2在线缆02上发送机械波信号,可以设置杆塔单元01的机械波收发器2在检测到线缆02上未传输有机械波信号时,才发送机械波信号。而在检测到线缆02上传输有机械波信号时,延迟发送机械波信号。
249.在步骤1502中,主杆塔单元011通过机械波收发器2接收第一从杆塔单元012a的状态信息。
250.本公开实施例提供的技术方案,主杆塔单元011的机械波收发器2接收携带有第一从杆塔单元012a的状态信息的机械波信号,然后,将该机械波信号转换为电信号,并将携带有第一从杆塔单元012a的状态信息的电信号发送给光网络设备4。
251.在步骤1503中,主杆塔单元011通过光网络设备4向监控中心发送第一从杆塔单元012a的状态信息。
252.本公开实施例提供的技术方案,主杆塔单元011接收到第一从杆塔单元012a的状态信息之后,通过光网络设备4向监控中心发送第一从杆塔单元012a的状态信息。
253.在一些示例中,当主杆塔单元011包括监测设备3时,主杆塔单元011还通过光网络设备4向监控中心发送主杆塔单元011的状态信息。
254.需要说明的是,主杆塔单元011除了接收从杆塔单元012的状态信息,并将从杆塔单元012的状态信息发送给监控中心之外。主杆塔单元011还可以接收监控中心的一些指令,并将指令发送给各个从杆塔单元012。
255.在主杆塔单元011和各个从杆塔单元012正式通信之前,可以在各个从杆塔单元012中确定中继杆塔单元。其中,中继杆塔单元用于在接收到目的地址不是本中继杆塔单元的地址的机械波信号时,转发机械波信号。
256.本公开实施例对在各个从杆塔单元012中确定中继杆塔单元的实现方式不做限定。在一些示例中,可以是由人工在各个从杆塔单元012中选取中继杆塔单元。在一些示例中,可以是每间隔目标数量个从杆塔单元012,确定一个中继杆塔单元。在一些示例中,还可以是由主杆塔单元011在各个从杆塔单元012中确定中继杆塔单元。
257.在一些示例中,如图19所示,主杆塔单元011可以通过拓扑发现操作,在各个从杆塔单元012中确定中继杆塔单元。拓扑发现操作的处理流程可以如下所述:
258.主杆塔单元011通过机械波收发器2广播拓扑发现消息,拓扑发现消息用于指示未回复过主杆塔单元011的杆塔单元01(从杆塔单元012)通过机械波收发器2发送回复消息。
259.其中,拓扑发现消息中记载有已回复过主杆塔单元011的从杆塔单元012的标识信息(如地址),并且,拓扑发现消息中还可以记载有各个从杆塔单元012的身份标识信息,如该从杆塔单元012是中继杆塔单元还是非中继杆塔单元。
260.主杆塔单元011通过机械波收发器2广播拓扑发现消息之后,如果是第一次广播拓扑发现消息,则接收到拓扑发现消息的各个从杆塔单元012依次向主杆塔单元011发送回复消息。由于拓扑发现消息是通过线缆02传输的,所以各个从杆塔单元012按照距主杆塔单元011由近至远的顺序依次接收到拓扑发现消息。并且,先接收到拓扑发现消息的从杆塔单元012先向主杆塔单元011发送回复消息。因此,通过接收到回复消息的时间的先后,主杆塔单元011能够确定此次拓扑发现消息传递的最远的从杆塔单元012。
261.主杆塔单元011通过机械波收发器2接收回复消息,并确定接收时间最晚的回复消息对应的杆塔单元01(从杆塔单元012)为中继杆塔单元。并且,主杆塔单元011在拓扑发现消息中记录此次回复的各个从杆塔单元012的标识,并记录此次确定出的中继杆塔单元。
262.然后,主杆塔单元011继续广播拓扑发现消息。
263.之前发送过回复消息的各个从杆塔单元012会再次接收到该拓扑发现消息,对于这类从杆塔单元012,如果从杆塔单元012确定拓扑发现消息中携带有该从杆塔单元012的标识信息,且该从杆塔单元012不是中继杆塔单元则不做响应。如果从杆塔单元012确定拓扑发现消息中携带有该从杆塔单元012的标识消息,且该从杆塔单元012为中继杆塔单元,则该从杆塔单元012会转发该拓扑发现消息。
264.经中继杆塔单元转发的拓扑发现消息会被一些之前未发送过回复消息的从杆塔单元012接收到。对于这类从杆塔单元012,从杆塔单元012检测到拓扑发现消息中未带有自己的标识信息,则会向主杆塔单元011发送回复消息。
265.同样的,由于拓扑发现消息是通过线缆02传输的,所以各个从杆塔单元012按照距中继杆塔单元由近至远的顺序依次接收到拓扑发现消息。并且,先接收到拓扑发现消息的
从杆塔单元012先发送回复消息。
266.各个回复消息依次被中继杆塔单元接收到,且中继杆塔单元每接收到一个回复消息,则向主杆塔单元011转发一个回复消息。因此,通过回复消息的接收时间的先后,主杆塔单元011能够确定此次拓扑发现消息传递的最远的从杆塔单元012。
267.主杆塔单元011通过机械波收发器2接收回复消息,并确定接收时间最晚的回复消息对应的杆塔单元01(从杆塔单元012)为中继杆塔单元。然后,主杆塔单元011在拓扑发现消息中记录此次回复的各个从杆塔单元012的标识,并记录此次确定出的中继杆塔单元。
268.之后,主杆塔单元011继续广播拓扑发现消息,直至满足目标条件。
269.本公开实施例对目标条件不做限定,在一些示例中,目标条件为主杆塔单元011接收到另一主杆塔单元011发送的回复消息。也即,该主杆塔单元011拓扑发现了该主杆塔单元011与另一主杆塔单元011之间的所有从杆塔单元012,另一主杆塔单元011之后的从杆塔单元012应当由其余主杆塔单元011进行管理。而该主杆塔单元011与另一主杆塔单元011之间的从杆塔单元012具体由哪一个主杆塔单元011管理,可以由监控中心确定。
270.在另一些示例中,目标条件为主杆塔单元011在通过机械波收发器2广播拓扑发现消息之后的第一目标时长内,未接收到回复消息。也即,在某些情况下,因线缆02中断或者机械波收发器2故障等原因,主杆塔单元011无法接收到回复消息,此时也应当中止拓扑发现操作,并可以上报故障消息,通知工作人员进行处理。
271.另外,在拓扑发现操作过程中,有时可能会因杆塔单元01的机械波收发器2生成的机械波信号的振幅较小或某些从杆塔单元012故障,导致主杆塔单元011发送的拓扑发现消息无法到达新的从杆塔单元012,则在拓扑发现操作过程中,可以采用以下措施解决或缓解这一问题。
272.在一些示例中,如果主杆塔单元011第一次广播拓扑发现消息,且在某一目标时长内未接收到回复消息,则通过机械波收发器2使用振幅增大的机械波信号重新广播拓扑发现消息,直至主杆塔单元011接收到回复消息,或,主杆塔单元011的机械波收发器2生成的机械波信号的振幅达到目标振幅。其中,该目标振幅可以为主杆塔单元011的机械波收发器2能够达到的最大振幅。
273.在一些示例中,如图20所示,如果主杆塔单元011之前已经确定出了至少一个中继杆塔单元,则可以由目标中继杆塔单元进行如下处理,其中,目标中继杆塔单元为确定出的距主杆塔单元011最远的中继杆塔单元。
274.目标中继杆塔单元通过机械波收发器2接收拓扑发现消息。目标中继杆塔单元通过机械波收发器2使用第一振幅的机械波信号广播拓扑发现消息。当目标中继杆塔单元在第二目标时长内未接收到回复消息时,目标中继杆塔单元通过机械波收发器2使用振幅增大的机械波信号重新广播拓扑发现消息,直至目标中继杆塔单元接收到回复消息,或,目标中继杆塔单元的机械波收发器2生成的机械波信号的振幅达到目标振幅。其中,该目标振幅可以为目标中继杆塔单元的机械波收发器2能够达到的最大振幅。
275.在一些示例中,为了避免多个从杆塔单元012同时发送回复消息时,机械波收发器2可以在检测到线缆02上传输有机械波信号时,延迟发送机械波信号。
276.在架空输电线路运行过程中,杆塔单元01(中的机械波收发器2)可能会发生故障,例如,杆塔单元01的机械波收发器2无法接收或无法发送机械波信号。当某一杆塔单元01发
生故障时,除了影响自身之外,还可能对整个架空输电线路形成的通信链路产生影响。
277.当确定第一从杆塔单元012a故障时,可以采用以下措施来降低第一从杆塔单元012a故障对其它杆塔单元012造成的影响。
278.在一些示例中,如图21所示,当第一从杆塔单元012a故障,且第一从杆塔单元012a为中继杆塔单元时,主杆塔单元011在位于第三中继杆塔单元012d远离主杆塔单元011的一侧的各个从杆塔单元012中重新确定中继杆塔单元(也即,重新进行拓扑发现操作)。其中,第三中继杆塔单元012d为位于主杆塔单元011和第一从杆塔单元012a之间,且与第一从杆塔单元012a直接通信的中继杆塔单元。
279.在一些示例中,如图22所示,当第一从杆塔单元012a故障,且第一从杆塔单元012a为中继杆塔单元时,主杆塔单元011确定位于第一从杆塔单元012a两侧的两个从杆塔单元为新的中继杆塔单元。在一些示例中,两个从杆塔单元均与第一从杆塔单元012a相邻。
280.在一些示例中,当第一从杆塔单元012a不为中继杆塔单元时,则第一从杆塔单元012a的故障,仅仅会影响自身状态信息的发送,而并不会影响其它杆塔单元01的状态信息的传输。因此,在这种情况下,可以仅向监控中心上报故障消息,以指示第一从杆塔单元012a故障,提醒工作人员及时采取措施修复第一从杆塔单元012a上的机械波收发器2。
281.本公开实施例对确定某一从杆塔单元012故障的方式不做限定。在一些示例中,以第一从杆塔单元012a为例,对于主杆塔单元011向从杆塔单元012请求状态信息的情况,在主杆塔单元011发送获取状态信息的请求之后,当在目标时长内未接收到第一从杆塔单元012a的状态信息时,通过光网络设备4向监控中心发送故障指示消息,该故障指示消息用于指示第一从杆塔单元012a故障。
282.为了减小线缆02因其它原因产生的振动(这类振动的频率可以称为噪声频率)对线缆02上传递的机械波信号产生的干扰,机械波信号的频率应当避开线缆02的噪声频率。也即,机械波信号应当使用除噪声频率之外的频率。
283.在一些示例中,第一杆塔单元(任一杆塔单元01,可以为主杆塔单元011,也可以为从杆塔单元012)通过机械波收发器2检测线缆02的噪声频率。然后,第一杆塔单元控制机械波收发器2生成的机械波信号的频率避开该噪声频率。
284.在一些示例中,第一杆塔单元通过机械波收发器2向第二杆塔单元发送频率指示消息,频率指示消息用于指示避开噪声频率。第二杆塔单元通过机械波收发器2接收频率指示消息,控制机械波收发器2生成的向第一杆塔单元发送的机械波信号的频率避开该噪声频率。
285.其中,第二杆塔单元为与第一杆塔单元直接通信的杆塔单元01,也可以理解为,第二杆塔单元和第一杆塔单元之间的通信不需要由中继杆塔单元辅助完成,还可以理解为,第一杆塔单元和第二杆塔单元之间不存在中继杆塔单元。频率指示消息是基于噪声频率确定的。
286.本公开实施例提供的技术方案,通过上述操作,能够使得第一杆塔单元生成的机械波信号以及接收到的机械波信号的频率均避开噪声频率,从而能够机械波信号受到的影响。
287.本公开实施例对频率指示消息携带的信息的类型不做限定。
288.在一些示例中,频率指示消息中携带有噪声频率。在另一些示例中,频率指示消息
携带有一个或多个目标频率,该目标频率与噪声频率错开,则接收到该频率指示消息的杆塔单元01可以将机械波收发器2生成的机械波信号的频率调整为目标频率。
289.在一些示例中,频率指示消息携带在第一杆塔单元通过机械波收发器2发送的状态信息所在的数据包中,或,携带在第一杆塔单元通过机械波收发器2发送的获取状态信息的请求所在的数据包中。这样,不用占用专门的时间发送频率指示消息,节约了通信资源。
290.在一些示例中,频率指示消息携带在第一杆塔单元通过机械波收发器2发送的拓扑发现消息所在的数据包中,或,携带在第一杆塔单元通过机械波收发器2发送的回复消息所在的数据包中。进一步的,在一些示例中,频率指示消息携带在第一杆塔单元发出的所有数据包中。
291.本公开实施例对发送频率指示消息的触发条件不做限定。
292.在一些示例中,可以在第一杆塔单元通过机械波收发器2发出的每个数据包中均携带频率指示消息。
293.在另一些示例中,也可以是当检测到噪声频率的振动较大时,第一杆塔单元才通过机械波收发器2发送频率指示消息,例如,在机械波收发器2发送的数据包中携带频率指示消息。
294.由于本公开实施例提供的技术方案中的杆塔单元01之间以通过线缆02传输机械波信号的形式进行通信,所以当线缆02中断时,中断处两侧的杆塔单元01的通信也会中断。利用这一特性,通过检测杆塔单元01之间通信状态,能够确定出线缆02的状况。
295.下面,对确定线缆02中断的处理过程进行示例性说明:
296.在一些示例中,如图23所示,主杆塔单元011为多个,多个主杆塔单元011包括第一主杆塔单元011a和第二主杆塔单元011b,第一主杆塔单元011a和第二主杆塔单元011b之间具有多个从杆塔单元012。
297.监控中心控制第一主杆塔单元011a检测第一主杆塔单元011a与该多个从杆塔单元012的通信状态,控制第二主杆塔单元011b检测第二主杆塔单元011b与该多个从杆塔单元012的通信状态。
298.然后,监控中心获取第一主杆塔单元011a返回的第一检测结果和第二主杆塔单元返回的第二检测结果。
299.如果第一检测结果指示第一主杆塔单元011a与第二从杆塔单元012b的通信正常,且第一主杆塔单元011a与位于第二从杆塔单元012b和第二主杆塔单元011b之间的从杆塔单元012的通信中断,并且,第二检测结果指示第二主杆塔单元011b与第三从杆塔单元012c的通信正常,且第二主杆塔单元011b与位于第三从杆塔单元012c和第一主杆塔单元011a之间的从杆塔单元012的通信中断,则确定第二从杆塔单元012b和第三从杆塔单元012c之间的线缆中断。
300.其中,第二从杆塔单元012b和第三从杆塔单元012c可以为相邻的两个从杆塔单元012,也可以为不相邻的两个从杆塔单元012,本公开实施例对此不做限定。
301.本公开实施例对监控中心控制第一主杆塔单元011a和第二主杆塔单元011b进行通信状态的检测的触发条件不做限定。
302.在一些示例中,当监控中心在获取到存在线缆02(如导线021)中断的情况时,控制第一主杆塔单元011a和第二主杆塔单元011b进行通信状态的检测,以确定线缆02中断的位
置或范围。
303.在另一些示例中,监控中心可以周期性的控制第一主杆塔单元011a和第二主杆塔单元011b进行通信状态的检测
304.本公开实施例对第一主杆塔单元011a和第二主杆塔单元011b检测通信状态的具体方法不做限定。
305.在一些示例中,第一主杆塔单元011a(第二主杆塔单元011b)可以向多个从杆塔单元012依次发送获取状态信息的请求,然后基于各个从杆塔单元012的回复情况,确定与各个从杆塔单元012的通信状态。
306.在另一些示例中,第一主杆塔单元011a(第二主杆塔单元011b)可以广播状态检测消息(如可以为拓扑发现消息),则第一主杆塔单元011a(第二主杆塔单元011b)可以基于各个从杆塔单元012的回复情况,确定与各个从杆塔单元012的通信状态。
307.下面,对本公开实施例提供的架空输电线路巡检系统进行更加详细的示例性说明:
308.在一些示例中,架空输电线路巡检系统还包括多个变电站,变电站具有otn设备,多个变电站之间通过otn设备以及otn设备连接的opgw形成otn网络。监控中心与otn网络通信连接,如监控中心可以位于任一变电站内,也可以与任一变电站内的otn设备连接。
309.架空输电线路包括多个主杆塔单元011和多个从杆塔单元012,多个主杆塔单元011具有光网络设备4(如olt、onu、交换机和路由器等),且多个主杆塔单元011之间通过光网络设备4以及opgw形成光纤通信网络。光纤通信网络通过opgw与otn网络通信连接。其中,光纤通信网络可以为无源光纤网络(passive optical network,pon)或交换机网络等。
310.多个从杆塔单元012之间通过机械波收发器2和线缆02形成机械波通信网络。机械波通信网络与光纤通信网络通信连接。
311.位于从杆塔单元012上的监测设备3与机械波通信网络连接,位于主杆塔单元011上的监测设备3与光纤通信网络连接。
312.如图24所示,位于从杆塔单元012上的监测设备3获取到的状态信息通过机械波通信网络传输至光纤通信网络,然后传输至otn网络,再传输至监控中心。位于主杆塔单元011上的监测设备3获取到的状态信息通过光纤通信网络传输至otn网络,再传输至监控中心。
313.在另一些示例中,杆塔单元01上虽然具有光缆接头盒,但因使用权限等原因不能使用。在这种情况下,只有位于变电站内或变电站附近的杆塔单元01会部署光网络设备4(如otn设备),也即只有在位于变电站内或变电站附近的杆塔单元01为主杆塔单元011,则主杆塔单元011和变电站之间形成otn网络。
314.如图25所示,在这种情况下不存在由各个主杆塔单元011组成的光纤通信网络,则机械波通信网络直接与otn网络相连。监测设备3获取到的状态信息通过机械波通信网络传输至otn网络,再传输至监控中心。
315.本公开实施例还提供了一种计算机可读存储介质,该计算机可读存储介质包括指令,当该计算机可读存储介质在杆塔单元或监控中心上运行时,使得杆塔单元或监控中心执行上述架空输电线路巡检的方法。
316.本公开实施例还提供了一种包含指令的计算机程序产品,当该计算机程序产品在杆塔单元或监控中心上运行时,该杆塔单元或监控中心执行上述架空输电线路巡检的方
法。
317.本公开实施例还提供了一种芯片,该芯片包括可编程逻辑电路和/或程序指令,当该芯片运行时用于实现上述架空输电巡检的方法。
318.以上所述仅为本公开的可选实施例,并不用以限制本公开,凡在本公开的原则之内,所作的任何修改、等同替换、改进等,均应包含在本公开的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1