一种旋转电机功率转换装置的制作方法
1.本发明涉及旋转电机技术领域,尤其涉及一种旋转电机功率转换装置。
背景技术:
2.功率转换装置是通过主动工作来控制电机按照设定的方向、速度、角度、响应时间进行工作的集成电路,功率转换装置内部通常通过风扇吹送进行散热,长时间使用后出风口堆积灰尘;
3.针对上述所提到的功率转换装置所存在的技术问题,经检索发现,有一篇专利号为cn201911390453.9一种附加阻尼调节的虚拟同步发电机功率控制方法和系统,该种附加阻尼调节的虚拟同步发电机功率控制方法和系统,通过合理地设计虚拟同步发电机的附加阻尼控制器,进而有效的配置同步发电机的机电振荡模态主导极点,削弱扰动时同步发电机转子转速振荡,进而改善电力系统阻尼特性,抑制系统低频振荡;
4.结合检索专利可得知,旋转电机的功率转换通过控制装置进行调节,功率转换装置内部需要电路板进行控制,而电路板在运行时通过风扇进行散热,风扇对电路板的表面形成对流进而散热,散热时散热口堆积灰尘,导致功率转换装置无法利用风力对灰尘进行清刮收集。
技术实现要素:
5.为解决上述技术问题,本发明提供一种旋转电机功率转换装置,以解决上述背景技术中描述问题。
6.本发明一种旋转电机功率转换装置的目的与功效,由以下具体技术手段达成:一种旋转电机功率转换装置,包括控制器,所述控制器内部的一侧旋转有风扇,所述控制器远离风扇的一侧旋转有散热网,所述控制器靠近散热网的一侧设有可利用风力清刮的传动机构。
7.进一步的,所述传动机构包括转轴、套环、摆臂、重物、伸缩杆和旋转球体,转轴旋转于散热网的一侧,套环旋转于转轴的外侧,摆臂摆动于套环的两端,重物滑动于摆臂的内侧,伸缩杆伸缩于转轴和套环之间,旋转球体铰接于转轴的一侧。
8.进一步的,所述转轴呈横向工状设置,转轴的上端贯穿有凹槽,套环环绕于转轴中间位置,转轴中间位置可呈360
°
旋转,套环呈圆环状设置。
9.进一步的,所述摆臂的内侧嵌入有凹槽,凹槽呈倾斜15
‑
45
°
设置,重物滚动于凹槽的内部,重物呈三角状设置,伸缩杆呈三段套接设置,伸缩杆呈半圆弧状设置,伸缩杆的一端与转轴的轴心间隔2
‑
5cm。
10.进一步的,所述摆臂的内部贯穿有孔洞,减轻摆臂重量,套环上下两端摆臂长度相差1
‑
2cm,摆臂的一端均呈半圆弧状设置,摆臂内部凹槽内壁同样呈倾斜设置,倾斜角度为5
‑
15
°
。
11.进一步的,所述重物可为砝码或任意重量在100
‑
200g的物品,利用重物的形状设
置,能够减缓重物于摆臂内部的移动速度,进而减缓摆臂的摆动速度。
12.进一步的,所述套环旋转时,伸缩杆于转轴的外侧环绕旋转,同时伸缩杆收缩,伸缩杆半圆弧角度为120
‑
160
°
,利用伸缩杆半圆弧状设置,方便套环环绕转轴旋转的同时带动转轴旋转。
13.进一步的,所述传动机构包括刮板、滚轮、集尘盒、清刮架、凸块、气囊和管道,刮板安装于摆臂的一侧,滚轮旋转于刮板的内侧,集尘盒滑动嵌套于刮板的内侧,清刮架贯穿于集尘盒内部的上下两端,管道贯穿于控制器的内部,凸块贯穿于控制器的内部,气囊弹性伸缩于凸块的一端。
14.进一步的,所述刮板的内侧嵌入有凹槽,滚轮和集尘盒均设于凹槽内部,滚轮的外侧环绕有海绵层,海绵层厚度为1
‑
2cm,滚轮延伸至刮板的外侧三分之一,清刮架之间间隔0.5
‑
1cm,清刮架呈等腰梯形设置,气囊与管道贯穿,凸块与摆臂贴合滑动。
15.进一步的,所述刮板与散热网的表面贴合,摆臂旋转时,刮板同步旋转,刮板的内侧设有多个凹槽,同时滚轮和集尘盒与凹槽配套设置。
16.有益效果:
17.1.风力吹送至摆臂内侧凹槽,利用风力,且摆臂的长度不同,并凹槽呈倾斜设置,因此摆臂能够通过套环旋转,同时凹槽内部重物于凹槽内部滚动,重物在移动过程中能够辅助摆臂摆动,套环旋转时通过伸缩杆和旋转球体带动转轴进行旋转,转轴上端凹槽旋转至下端,由于转轴的上下两端重量不同,因此转轴利用上端重力能够快速回位,进而转轴能够带动套环和摆臂回位;
18.2.刮板内侧滚轮与散热网的表面旋转贴合,利用滚轮对散热网表面灰尘进行清刮,而滚轮由于与散热网的摩擦呈自体旋转,自体旋转时能够将灰尘带动至清刮架的内侧,进而利用集尘盒对灰尘进行收集,使得传动机构能够利用风力自动对散热网表面灰尘进行清理;
19.3.摆臂旋转时挤压至凸块的一端,凸块呈垂直滑动,凸块滑动时挤压至气囊的一侧,利用气囊的收缩,带动管道内部清水流动,形成水循环散热。
附图说明
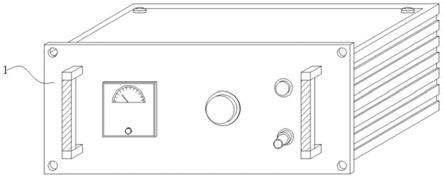
20.图1为本发明整体结构示意图。
21.图2为本发明控制器俯视剖面示意图。
22.图3为本发明套环结构示意图。
23.图4为本发明图3中a处放大结构示意图。
24.图5为本发明刮板结构示意图。
25.图6为本发明图5中b处放大结构示意图。
26.图7为本发明图2中c处放大结构示意图。
27.图1
‑
7中,部件名称与附图编号的对应关系为:
[0028]1‑
控制器,101
‑
风扇,102
‑
散热网,2
‑
转轴,201
‑
套环,202
‑
摆臂,203
‑
重物,204
‑
伸缩杆,205
‑
旋转球体,3
‑
刮板,301
‑
滚轮,302
‑
集尘盒,303
‑
清刮架,4
‑
凸块,401
‑
气囊,402
‑
管道。
具体实施方式
[0029]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例,基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0030]
实施例:
[0031]
如附图1至附图7所示:
[0032]
实施例1:参考说明书附图1和2可得知,一种旋转电机功率转换装置,包括控制器1,控制器1内部的一侧旋转有风扇101,控制器101远离风扇101的一侧旋转有散热网102,控制器1靠近散热网102的一侧设有可利用风力清刮的传动机构;
[0033]
其中:控制器1的内部安装有电路板和控制按键,控制按键和风扇101电性连接,风扇101安装有配套电机,风扇101和散热网102呈水平对应设置,传动机构和风扇101呈水平对应设置,传动机构利用风扇101的风力对散热网102的表面进行定时自动清刮;
[0034]
参考说明书附图2、3和4可得知,传动机构包括转轴2、套环201、摆臂202、重物203、伸缩杆204和旋转球体205,转轴2旋转于散热网102的一侧,套环201旋转于转轴2的外侧,摆臂202摆动于套环201的两端,重物203滑动于摆臂202的内侧,伸缩杆204伸缩于转轴2和套环201之间,旋转球体205铰接于转轴2的一侧;
[0035]
转轴2呈横向工状设置,转轴2的上端贯穿有凹槽,套环201环绕于转轴2中间位置,转轴2中间位置可呈360
°
旋转,套环201呈圆环状设置,摆臂202的内侧嵌入有凹槽,凹槽呈倾斜15
‑
45
°
设置,重物203滚动于凹槽的内部,重物203呈三角状设置,伸缩杆204呈三段套接设置,伸缩杆204呈半圆弧状设置,伸缩杆204的一端与转轴2的轴心间隔2
‑
5cm;
[0036]
其中:风力吹送至摆臂202内侧凹槽,利用风力,且摆臂202的长度不同,并凹槽呈倾斜设置,因此摆臂202能够通过套环201旋转,同时凹槽内部重物203于凹槽内部滚动,重物203在移动过程中能够辅助摆臂202摆动,套环201旋转时通过伸缩杆204和旋转球体205带动转轴2进行旋转,转轴2上端凹槽旋转至下端,由于转轴2的上下两端重量不同,因此转轴2利用上端重力能够快速回位,进而转轴2能够带动套环201和摆臂202回位;
[0037]
风扇101旋转,风力吹送至摆臂202内侧凹槽,利用风力,且摆臂202的长度不同,并凹槽呈倾斜设置,因此摆臂202能够通过套环201旋转,同时凹槽内部重物203于凹槽内部滚动,重物203在移动过程中能够辅助摆臂202摆动,套环201旋转时通过伸缩杆204和旋转球体205带动转轴2进行旋转,转轴2上端凹槽旋转至下端,由于转轴2的上下两端重量不同,因此转轴2利用上端重力能够快速回位,进而转轴2能够带动套环201和摆臂202回位,使得摆臂202能够形成往复旋转;
[0038]
其中:转轴2,利用转轴2的上端贯穿有凹槽,套环201整体旋转时,转轴2上端凹槽旋转至下端,由于转轴2的上下两端重量不同,因此转轴2利用上端重力能够快速回位;
[0039]
套环201,套环201能够方便摆臂202整体旋转;
[0040]
摆臂202,摆臂202的内部贯穿有孔洞,减轻摆臂202重量,套环201上下两端摆臂202长度相差1
‑
2cm;
[0041]
摆臂202的一端均呈半圆弧状设置,摆臂202内部凹槽内壁同样呈倾斜设置,倾斜角度为5
‑
15
°
;
[0042]
重物203,重物203可为砝码或任意重量在100
‑
200g的物品,利用重物203的形状设置,能够减缓重物203于摆臂202内部的移动速度,进而减缓摆臂202的摆动速度;
[0043]
伸缩杆204,套环201旋转时,伸缩杆204于转轴2的外侧环绕旋转,同时伸缩杆204收缩,伸缩杆204半圆弧角度为120
‑
160
°
;
[0044]
利用伸缩杆204半圆弧状设置,方便套环201环绕转轴2旋转的同时带动转轴2旋转;
[0045]
实施例2:参考说明书附图5、6和7可得知,实施例2与实施例1的不同在于,传动机构包括刮板3、滚轮301、集尘盒302、清刮架303、凸块4、气囊401和管道402,刮板3安装于摆臂202的一侧,滚轮301旋转于刮板3的内侧,集尘盒302滑动嵌套于刮板3的内侧,清刮架303贯穿于集尘盒302内部的上下两端,管道402贯穿于控制器1的内部,凸块4贯穿于控制器1的内部,气囊401弹性伸缩于凸块4的一端;
[0046]
刮板3的内侧嵌入有凹槽,滚轮301和集尘盒302均设于凹槽内部,滚轮301的外侧环绕有海绵层,海绵层厚度为1
‑
2cm,滚轮301延伸至刮板3的外侧三分之一,清刮架303之间间隔0.5
‑
1cm,清刮架303呈等腰梯形设置,气囊401与管道402贯穿,凸块4与摆臂202贴合滑动;
[0047]
其中:刮板3内侧滚轮301与散热网102的表面旋转贴合,利用滚轮301对散热网102表面灰尘进行清刮,而滚轮301由于与散热网102的摩擦呈自体旋转,自体旋转时能够将灰尘带动至清刮架303的内侧,进而利用集尘盒302对灰尘进行收集,使得传动机构能够利用风力自动对散热网102表面灰尘进行清理;
[0048]
摆臂202旋转时挤压至凸块4的一端,凸块4呈垂直滑动,凸块4滑动时挤压至气囊401的一侧,利用气囊401的收缩,带动管道402内部清水流动,形成水循环散热;
[0049]
摆臂202旋转时带动刮板3旋转,刮板3内侧滚轮301与散热网102的表面旋转贴合,利用滚轮301对散热网102表面灰尘进行清刮,而滚轮301由于与散热网102的摩擦呈自体旋转,自体旋转时能够将灰尘带动至清刮架303的内侧,进而利用集尘盒302对灰尘进行收集;
[0050]
摆臂202旋转时挤压至凸块4的一端,凸块4呈垂直滑动,凸块4滑动时挤压至气囊401的一侧,利用气囊401的收缩,带动管道402内部清水流动;
[0051]
其中:刮板3,刮板3与散热网102的表面贴合,摆臂202旋转时,刮板3同步旋转,刮板3的内侧设有多个凹槽,同时滚轮301和集尘盒302与凹槽配套设置;
[0052]
滚轮301,滚轮301分布方向与刮板3旋转方向箱体,刮板3旋转时,滚轮301呈自体360
°
旋转;
[0053]
集尘盒302,集尘盒302呈横向凹状设置,集尘盒302对滚轮301外侧灰尘进行收集;
[0054]
清刮架303,清刮架303每两个呈一组配套设置,滚轮301旋转时,滚轮301的一侧贯穿清刮架303的内侧,进而利用摩擦力,能够对滚轮301内侧贴合刮取;
[0055]
凸块4,凸块4贯穿并延伸至摆臂202的一端,摆臂202旋转时,凸块4于控制器1的内侧呈垂直滑动;
[0056]
气囊401,气囊401呈椭圆状设置,凸块4垂直滑动时,气囊401内部气体冲击至管道402的一侧,气囊401设于管道402的两端;
[0057]
管道402,管道402的内部填充有清水,管道402环绕控制器1的内壁,气囊401利用气体压缩,辅助管道402内部清水流动,进而能够形成水循环降温。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1