滑模观测器与电流预测的永磁同步电机控制装置及方法
1.本发明涉及一种滑模观测器与电流预测的永磁同步电机控制装置及方法。
背景技术:
2.近年来,永磁同步电机作为电驱系统中交流调速核心部件,因其功耗低、功率密度高、调速范围宽、可控性好等诸多优良特点被广泛应用于军事、航天、工业领域,因此技术高度密集的伺服环境也对电机控制性能精度提出越来越高要求。然而电机内部关键元件永磁体,由于易受潮湿、高温、化学腐蚀等复杂多变的运行环境影响,存在不可逆的失磁风险,致使电机控制性能严重退化。另外,由于永磁同步电机自身是个强耦合、非线性、多变量的复杂时变系统,电机参数发生偏差也会直接影响控制性能,这些因素都极大限制了永磁同步电机的推广及应用。
3.为了确保永磁同步电机本身及驱动系统的高效、可靠运行,针对永磁同步电机容错控制研究显得尤为重要。传统矢量控制中pid调节方式以其结构简单、效果明显、易于实现的优点被大规模运行于电驱系统,但在高性能伺服系统中却无法克服因参数摄动、失磁故障等因素对电控系统造成的不确定性,难以满足对故障状况下的有效容错。
技术实现要素:
4.为了解决上述技术问题,本发明提供一种结构简单、工作可靠的滑模观测器与电流预测的永磁同步电机控制装置,并提供其控制方法。
5.本发明解决上述技术问题的技术方案是:一种滑模观测器与电流预测的永磁同步电机控制装置,包括pi控制模块、clark变换模块、park变换模块、逆park变换模块、电流传感器模块、位置传感器模块、扰动补偿模块、无差拍电流预测模块、svpwm生成模块、永磁同步电机模块与滑模-龙伯格观测模块;
6.所述电流传感器模块与clark变换模块、永磁同步电机模块相连,用于采集永磁同步电机模块的定子三相电流ia、ib、ic,将三相电流发送至clark变换模块进行三相静止坐标系至两相静止坐标系的变换;
7.所述clark变换模块连接park变换模块,用于将变换后的两相电流i
α
、i
β
发送至park变换模块进行两相静止坐标系至两相旋转坐标系的变换;
8.所述park变换模块与滑模-龙伯格观测模块连接,同时位置传感器模块将电机位置角θ与通过clark变换后的两相同步坐标系下电流i
α
、i
β
发送至park变换模块,得到两相旋转坐标系下电流id与iq,并将两相电流id、iq发送至滑模-龙伯格观测模块;
9.所述滑模-龙伯格观测模块与无差拍电流预测模块连接,用于将park变化模块得到的两相电流id、iq输入至滑模-龙伯格观测器进行运算,得到d轴磁链观测值fd、q轴磁链观测值fq、d轴电流观测值q轴电流观测值发送至无差拍电流预测模块;
10.所述扰动补偿模块与无差拍电流预测模块连接,通过将位置传感器获取的电机实时角速度ω与参考角速度ωe输入至pi控制模块得到q轴参考电流i
qref
,再将q轴参考电流iqref
、设定好的d轴参考电流i
dref
、d轴电流id、q轴电流iq输入至扰动补偿模块,得到d、q轴电压补偿量δud、δuq,发送至无差拍电流预测模块;
11.所述无差拍电流预测模块与逆park变换模块连接,用于将滑模-龙伯格观测模块得到的d轴电流观测值q轴电流观测值d轴磁链观测值fd与q轴磁链观测值fq输入运算,得到d轴参考电压u
d*
与q轴参考电压u
q*
输入至逆park变换模块;
12.所述逆park变换模块与svpwm生成模块连接,用于将无差拍电流预测模块所得d轴参考电压u
d*
与q轴参考电压u
q*
、位置传感器得到的电机位置角θ输入至逆park变换模块运算,得到两相静止坐标系下电压u
α
、u
β
输入至svpwm生成模块;
13.所述svpwm生成模块与逆变器模块连接,将逆park变换得到的两相静止坐标系下电压u
α
、u
β
发送至svpwm生成模块,经过调制生成用于六路逆变器开关脉冲信号驱动永磁同步电机pmsm模块运转。
14.一种滑模观测器与电流预测的永磁同步电机控制方法,包括以下步骤:
15.步骤1:采集永磁同步电机转速与位置角:通过位置传感器获取电机角速度ω与位置角θ,将电机实时位置角θ发送至park变换模块与逆park变换模块;
16.步骤2:获取永磁同步电机电流:通过电流/电压传感器模块获取pmsm三相电流、ab相电压u
ab
与bc相电压u
bc
,通过clark变换与park变换获得旋转坐标系下两相电流id、iq及d轴电压ud、q轴电压uq;
17.步骤3:建立电机前馈扰动补偿模块:将步骤2得到的两相电流id、iq以及q轴参考电流i
qref
、d轴参考电流i
dref
输入至扰动补偿模块中得到d、q轴电压扰动量δud、δuq;
18.步骤4:建立滑模-龙伯格观测模块:将步骤2中得到的d轴电流id、q轴电流iq、d轴电压ud与q轴电压uq输入至滑模-龙伯格观测模块,得到d轴电流观测值fd、q轴电流观测值fq、永磁磁链算式
19.步骤5:建立无差拍电流预测模块:将所得d轴电流观测值fd、q轴电流观测值fq、永磁磁链算式d轴电压扰动量δud、q轴电压扰动δuq以及q轴参考电流i
qref
、d轴参考电流i
dref
输入至无差拍电流预测模块计算得出d轴参考电压u
d*
与q轴参考电压u
q*
;
20.步骤6:将d轴参考电压u
d*
、q轴参考电压u
q*
、电机位置角θ输入至逆park变换模块运算,得到两相静止坐标系下电压u
α
、u
β
,将u
α
、u
β
输入至svpwm生成模块,经过调制生成用于六路逆变器开关脉冲信号驱动永磁同步电机pmsm模块运转。
21.上述滑模观测器与电流预测的永磁同步电机控制方法,步骤3的具体步骤为:
22.根据永磁同步电机数学模型,引入前馈扰动补偿器后的电机状态方程为:
[0023][0024]
式中:u为电压;δu为电压补偿量;δx与δy为d、q轴电流增量;d为参数失配造成的电机扰动;x、y为未加扰动补偿时d、q轴电流;a、b、e、c均为中间变量,其中:
龙伯格观测器,观测器具体表达为:
[0047][0048]
式中ksgn(e)为滑模控制项,sgn()为符号函数,分别为x,y、u的观测值,x=[i
d iq]
t
为系统的状态变量,u=[u
d uq]
t
为系统输入,y=[i
d iq]
t
为系统输出,中间变量中间变量其中误差k、h为待设计矩阵,k1、k2、h1、h2均为待设计实数,k1、k2均大于0;
[0049]
由磁链重构状态方程与式(8)得观测器误差方程为:
[0050][0051]
其中:表示x、的导数,d为参数失配造成的电机扰动,f为电机的物理变量,中间变量e1、e2分别为两种状态下实际值与估计值的误差,分别为两种状态下实际值与估计值的误差,表示两种状态变量的估计值;
[0052]
选定为lyapunov函数,求导可得:
[0053][0054]
设计a=hω时,观测器ω变化对误差方程影响可被隔开,可得
[0055][0056]
其中k3=min{k1,k2},设计k3=(||d||||f||)
max
+η,η为一常数,有df=ksgn(e),代入参数可得永磁磁链算式为ψ
rd
=-k2sgn(e2)。
[0057]
上述滑模观测器与电流预测的永磁同步电机控制方法,所述步骤5中无差拍电流预测控制的具体过程为:
[0058]
永磁同步电机状态方程离散形式为:
[0059]
i(k+1)=e(k)
·
i(k)+f
·
u(k)+p(k)
[0060]
式中e(k)、p(k)分别表示整合后的中间变量,其中式中e(k)、p(k)分别表示整合后的中间变量,其中ts为采样时间,i(k+1)为k+1时刻定子电流值,u(k)为k时刻定子电压值,ω(k)为k时刻电机机械角速度,ld、lq表示d,q轴电感,
表贴式永磁同步电机中lq=ld=l;采用一阶泰勒公式分解可得:可得无差拍预测控制器电压矢量方程为u(k)=f-1
[i(k+1)-e(k)i(k)-p(k)]。
[0061]
本发明的有益效果在于:本发明采用所提出的改进无差拍电流预测控制器替换传统pi控制器,能够提升永磁同步电机动态响应,减小电机参数非线性变化时对系统动态性能的影响。同时采用滑膜-龙伯格状态器获取永磁体实时磁链,提升电机磁链改变时调速系统鲁棒性能;本发明的控制方式具有调速性能更好,控制精度更高优点,并可在存在参数偏差状况下精确实现对电机电流无静差跟踪,提高电机失磁故障下带负载能力,具有故障状况下容错控制功能,有利用提升永磁同步电机恶劣工况下的使用性能与使用寿命。
附图说明
[0062]
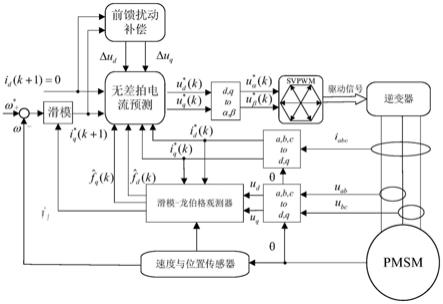
图1为本发明控制装置的结构框图。
[0063]
图2为本发明控制方法的流程图。
[0064]
图3为本发明控制方法的输出转矩图。
[0065]
图4为传统pi控制方法的输出转矩图。
[0066]
图5为本发明控制方法的转速响应图。
[0067]
图6为传统pi控制方法的转速响应图。
具体实施方式
[0068]
下面结合附图和实施例对本发明作进一步的说明。
[0069]
如图1-图2所示,一种滑模观测器与电流预测的永磁同步电机控制装置,包括pi控制模块、clark变换模块、park变换模块、逆park变换模块、电流传感器模块、位置传感器模块、扰动补偿模块、无差拍电流预测模块、svpwm生成模块、永磁同步电机模块与滑模-龙伯格观测模块;
[0070]
所述电流传感器模块与clark变换模块、永磁同步电机模块相连,用于采集永磁同步电机模块的定子三相电流ia、ib、ic,将三相电流发送至clark变换模块进行三相静止坐标系至两相静止坐标系的变换;
[0071]
所述clark变换模块连接park变换模块,用于将变换后的两相电流i
α
、i
β
发送至park变换模块进行两相静止坐标系至两相旋转坐标系的变换;
[0072]
所述park变换模块与滑模-龙伯格观测模块连接,同时位置传感器模块将电机位置角θ与通过clark变换后的两相同步坐标系下电流i
α
、i
β
发送至park变换模块,得到两相旋转坐标系下电流id与iq,并将两相电流id、iq发送至滑模-龙伯格观测模块;
[0073]
所述滑模-龙伯格观测模块与无差拍电流预测模块连接,用于将park变化模块得到的两相电流id、iq输入至滑模-龙伯格观测器进行运算,得到d轴磁链观测值fd、q轴磁链观测值fq、d轴电流观测值q轴电流观测值发送至无差拍电流预测模块;
[0074]
所述扰动补偿模块与无差拍电流预测模块连接,通过将位置传感器获取的电机实时角速度ω与参考角速度ωe输入至pi控制模块得到q轴参考电流i
qref
,再将q轴参考电流iqref
、设定好的d轴参考电流i
dref
、d轴电流id、q轴电流iq输入至扰动补偿模块,得到d、q轴电压补偿量δud、δuq,发送至无差拍电流预测模块;
[0075]
所述无差拍电流预测模块与逆park变换模块连接,用于将滑模-龙伯格观测模块得到的d轴电流观测值q轴电流观测值d轴磁链观测值fd与q轴磁链观测值fq输入运算,得到d轴参考电压u
d*
与q轴参考电压u
q*
输入至逆park变换模块;
[0076]
所述逆park变换模块与svpwm生成模块连接,用于将无差拍电流预测模块所得d轴参考电压u
d*
与q轴参考电压u
q*
、位置传感器得到的电机位置角θ输入至逆park变换模块运算,得到两相静止坐标系下电压u
α
、u
β
输入至svpwm生成模块;
[0077]
所述svpwm生成模块与逆变器模块连接,将逆park变换得到的两相静止坐标系下电压u
α
、u
β
发送至svpwm生成模块,经过调制生成用于六路逆变器开关脉冲信号驱动永磁同步电机pmsm模块运转。
[0078]
一种滑模观测器与电流预测的永磁同步电机控制方法,包括以下步骤:
[0079]
步骤1:采集永磁同步电机转速与位置角:通过位置传感器获取电机角速度ω与位置角θ,将电机实时位置角θ发送至park变换模块与逆park变换模块。
[0080]
步骤2:获取永磁同步电机电流:通过电流/电压传感器模块获取pmsm三相电流、ab相电压u
ab
与bc相电压u
bc
,通过clark变换与park变换获得旋转坐标系下两相电流id、iq及d轴电压ud、q轴电压uq。
[0081]
步骤3:建立电机前馈扰动补偿模块:将步骤2得到的两相电流id、iq以及q轴参考电流i
qref
、d轴参考电流i
dref
输入至扰动补偿模块中得到d、q轴电压扰动量δud、δuq。
[0082]
步骤3的具体步骤为:
[0083]
根据永磁同步电机数学模型,引入前馈扰动补偿器后的电机状态方程为:
[0084][0085]
式中:u为电压;δu为电压补偿量;δx与δy为d、q轴电流增量;d为参数失配造成的电机扰动;x、y为未加扰动补偿时d、q轴电流;a、b、e、c均为中间变量,其中:
[0086][0087]
式中:δid、δiq分别表示d轴与q轴电流误差,dd、dq分别为d轴与q轴参数失配时的电机扰动,r为定子电阻,l为定子电感,ω为永磁同步电机角速度,ψr为永磁体磁链,引入前馈补偿后电机电流误差值oi,得系统状态方程为:
[0088][0089]
式中y
ref
为电流给定值,求解oi二阶微分方程:
[0090]
oi″
+oi′
=c(x+δx)
″
+c(x+δx)
′
=cξ
ꢀꢀꢀ
(3)
[0091]
其中,中间变量ξ=c(x+δx)
″
+c(x+δx)
′
;
[0092]
将式(2)代入式(3)可得
[0093]
ξ
′
=(x+δx)
″′
+(x+δx)
″
=aξ+bε
ꢀꢀꢀ
(4)
[0094]
式中中间变量ε=δu
″
+δu
′
,根据式(2)与式(4)得到补偿器误差状态空间方程为:
[0095]z′
=fz+gε
ꢀꢀꢀ
(5)
[0096]
其中f、z、g为中间变量,
[0097]
并假设存在δu,使得误差oi收敛于零,可得存在前馈补偿量δu为:
[0098][0099]
其中k0、k1、k2表示不同的积分系数k,e
τ
表示自然常数的τ次幂,τ为被积函数。
[0100]
确定补偿量后,根据劳斯判据证明补偿器稳定性,从而确定补偿器参数取值范围,式(5)改写为:
[0101]z′
=fz-gkz
ꢀꢀꢀ
(6)
[0102]
特征方程为:
[0103][0104]
其中s表示方程在复频域求解,i为单位矩阵。
[0105]
根据劳斯判据得出k取值范围为:
[0106][0107]
步骤4:建立滑模-龙伯格观测模块:将步骤2中得到的d轴电流id、q轴电流iq、d轴电压ud与q轴电压uq输入至滑模-龙伯格观测模块,得到d轴电流观测值fd、q轴电流观测值fq、永磁磁链算式
[0108]
步骤4中,设计滑模-龙伯格观测器,观测器具体表达为:
[0109][0110]
式中ksgn(e)为滑模控制项,sgn()为符号函数,分别为x,y、u的观测值,x=[i
d iq]
t
为系统的状态变量,u=[u
d uq]
t
为系统输入,y=[i
d iq]
t
为系统输出,中间变量中间变量其中误差k、h为待设计矩阵,
k1、k2、h1、h2均为待设计实数,k1、k2均大于0;
[0111]
由磁链重构状态方程与式(8)得观测器误差方程为:
[0112][0113]
其中:表示x、的导数,d为参数失配造成的电机扰动,f为电机的物理变量,中间变量e1、e2分别为两种状态下实际值与估计值的误差,分别为两种状态下实际值与估计值的误差,表示两种状态变量的估计值。
[0114]
选定为lyapunov函数,求导可得:
[0115][0116]
设计a=hω时,观测器ω变化对误差方程影响可被隔开,可得
[0117][0118]
其中k3=min{k1,k2},设计k3=(||d||||f||)
max
+η,η为一常数,有df=ksgn(e),代入参数可得永磁磁链算式为ψ
rd
=-k2sgn(e2)。
[0119]
步骤5:建立无差拍电流预测模块:将所得d轴电流观测值fd、q轴电流观测值fq、永磁磁链算式d轴电压扰动量δud、q轴电压扰动δuq以及q轴参考电流i
qref
、d轴参考电流i
dref
输入至无差拍电流预测模块计算得出d轴参考电压u
d*
与q轴参考电压u
q*
。
[0120]
无差拍电流预测控制的具体过程为:
[0121]
永磁同步电机状态方程离散形式为:
[0122]
i(k+1)=e(k)
·
i(k)+f
·
u(k)+p(k)
[0123]
式中e(k)、p(k)分别表示整合后的中间变量,其中式中e(k)、p(k)分别表示整合后的中间变量,其中ts为采样时间,i(k+1)为k+1时刻定子电流值,u(k)为k时刻定子电压值,ω(k)为k时刻电机机械角速度,ld、lq表示d,q轴电感,表贴式永磁同步电机中lq=ld=l;采用一阶泰勒公式分解可得:可得无差拍预测控制器电压矢量方程为u(k)=f-1
[i(k+1)-e(k)i(k)-p(k)]。
[0124]
步骤6:将d轴参考电压u
d*
、q轴参考电压u
q*
、电机位置角θ输入至逆park变换模块
运算,得到两相静止坐标系下电压u
α
、u
β
,将u
α
、u
β
输入至svpwm生成模块,经过调制生成用于六路逆变器开关脉冲信号驱动永磁同步电机pmsm模块运转。
[0125]
本发明利用matlab r2016a/simulink仿真平台对本发明的控制方法进行仿真建模,研究同等失磁条件下,采用传统pi调节器电流环控制与无差拍容错控制下的被控系统稳定性,两者均采用id=0控制策略。
[0126]
永磁同步电机参数如表1所示。
[0127]
表1 simulink中永磁同步电机参数
[0128]
tab.1 permanent magnet synchronous motor parameters in simulink
[0129][0130]
滑模龙伯格磁链观测器参数设置为:simulink中电机控制系统参数及仿真条件设置如下:电流环控制频率为2khz;给定角速度ω
ref
=100rad/s,负载转矩设置为0.15s时给定t
l
=10n;0.5s时发生永磁体失磁,磁链幅值由ψ
ro
=0.341wb降至ψ
′
ro
=0.187wb,仿真时间设为1s。仿真波形如图3至图6所示,从图3和图4中可以看出,当电机发生失磁故障时,失磁瞬间转矩发生明显抖动,随后又恢复至额定值并保持恒定,电机在失磁故障工况下稳定运行。从图5和图6中可看出发生失磁故障时,电机实际转速未见明显抖动,与给定转速保持一致。从上述对比仿真实验可知,永磁同步电机发生失磁故障时,滑模观测器与电流预测的永磁同步电机控制方法较电流传统pi控制具有更强的鲁棒性及更好的容错控制性能。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1