同步整流器驱动器电路、集成电路、谐振转换器及方法与流程
1.本说明书的实施例涉及用于两个同步整流器开关的同步整流器驱动器电路、诸如切换式谐振转换器的同步整流器开关的同步整流器驱动器电路。
背景技术:
2.谐振转换器是范围广泛的切换式转换器,其特征在于谐振电路的存在在确定输入-输出功率流时发挥积极作用。考虑到最常见的实现方式,在这些转换器中,由四个(或两个)功率开关(通常是功率场效应晶体管fet,诸如金属-氧化物-半导体场效应晶体管mosfet)组成的、由直流电压供电的全桥(或半桥)生成电压方波,电压方波被施加到谐振电路,谐振电路被调谐到与所述方波的基频接近的频率。由此,由于其选择性特征,谐振电路主要对基频分量做出响应,而忽略方波的高次谐波。
3.因此,循环功率可以通过改变方波的频率,同时将占空比固定保持在50%来调制。此外,根据谐振电路配置,与功率流相关联的电流和/或电压具有正弦或分段正弦形状。
4.这些电压被整流和滤波来为负载提供直流电。在离线应用中,为了遵守安全法规,为负载供电的整流和滤波系统通常经由变压器而被耦合到谐振电路,变压器提供源和负载之间的隔离,这是上述规定所要求的。与所有隔离式网络转换器相同,在该情况下,在与输入源连接的初级侧(与变压器的初级绕组相关)以及借助整流和滤波系统向负载供电的次级侧(与变压器的次级绕组相关)之间也进行区分。
5.目前,在众多类型的谐振转换器中,广泛使用的是所谓的llc谐振转换器,特别是其半桥形式。llc名称来自采用两个电感/电感器(l)和一个电容器(c)的谐振电路。
技术实现要素:
6.综上所述,针对两个同步整流器开关、特别是针对同步整流器开关的关断情况,本公开的各种实施例提供了新型的驱动器电路。
7.根据一个或多个实施例,上述技术优点中的一个或多个通过具有本文阐述的独特元件的同步整流器驱动器电路来实现。实施例还涉及相关的集成电路、电子谐振转换器和方法。
8.权利要求形成本文所提供的说明书的技术教导的组成部分。
9.如前所述,本公开的各种实施例涉及同步整流器驱动器电路,同步整流器驱动器电路被配置为驱动包括漏极、源极和栅极端子的同步整流器fet。在各种实施例中,同步整流器驱动器电路(例如,以集成电路的形式)包括被配置为与同步整流器fet的源极端子连接的第一端子、被配置为与同步整流器fet的漏极端子连接的第二端子以及被配置为与同步整流器fet的栅极端子连接的第三端子。
10.在各种实施例中,同步整流器驱动器电路被配置为测量第二端子和第一端子之间的电压,并且检测所测量的电压达到第一阈值的导通时刻和所测量的电压达到第二阈值的关断时刻。
11.在各种实施例中,同步整流器驱动器电路被配置为通过以下方式,根据所测量的电压,在第三端子和第一端子之间生成驱动信号:
[0012]-在另一时刻和关断时刻之间,根据所测量的电压的瞬时值来改变驱动信号;以及
[0013]-在关断时刻和下一导通时刻之间,将驱动信号设置为第二值。
[0014]
在各种实施例中,同步整流器驱动器电路还可以被配置为根据所测量的电压在导通时刻和另一时刻之间的瞬时值来改变驱动信号。备选地,同步整流器驱动器电路可以被配置为:在导通时刻和另一时刻之间,将驱动信号设置为第二值。例如,另一时刻可以通过以下方式来确定:
[0015]-确定所测量的电压在导通时刻和关断时刻之间达到峰值的时刻;
[0016]-相对于导通时刻,等待给定时间;或者
[0017]-确定所测量的电压达到给定阈值的时刻。
[0018]
例如,在各种实施例中,通过确定先前导通时刻和相应先前关断时刻之间的持续时间,并且估计该持续时间的一半处的另一时刻,可以确定所测量的电压达到峰值的时刻。
[0019]
根据第一方面,同步整流器驱动器电路可以被配置为:通过将驱动信号设置为一电压,在另一时刻和关断时刻之间改变驱动信号,其中该电压对应于恒定电压以及与所测量的电压的瞬时值的给定比例常数成比例的电压之和。
[0020]
在各种实施例中,同步整流器驱动器电路包括被配置为存储峰值的采样保持电路。在该情况下,同步整流器驱动器电路可以被配置为根据所存储的峰值来确定第二值。例如,第二值可以对应于恒定电压以及与所存储的峰值的给定比例常数成比例的电压之和。
[0021]
例如,在各种实施例中,同步整流器驱动器可以包括第四端子和可变电流发生器,可变电流发生器被配置为生成施加到第四端子的可变电流,其中可变电流与在可变电流发生器的输入处接收的电压成比例。因此,控制电路可以被配置为将可变电流发生器的输入:
[0022]-在导通时刻和另一时刻之间,连接到所存储的峰值,
[0023]-在另一时刻和关断时刻之间,连接到所测量的电压,或者
[0024]-在关断时刻和下一导通时刻之间,连接到第一端子。
[0025]
如下文将更详细解释的,在各种实施例中,第四端子处的电压可以被用于例如经由电压跟随器,为同步整流器驱动器的栅极端子直接生成驱动信号。
[0026]
然而,在各种实施例中,同步整流器驱动器电路还可以包括第五端子、被配置为生成施加到第五端子的恒定电流的恒流发生器、以及被配置为通过将第四端子处电压和第五端子处的电压求和来生成驱动信号的求和电路。
[0027]
根据第二方面,同步整流器驱动器电路可以被配置为在另一时刻和关断时刻之间改变驱动信号,以将所测量的电压直接调节到给定(恒定)参考值。例如,为此目的,同步整流器驱动器电路可以包括调节器电路,调节器电路被配置为接收所测量的电压和给定参考值,并且生成调节信号。具体地,在各种实施例中,调节器电路包括或者实现至少一个积分组件。因此,在该情况下,驱动信号可以(至少)在另一时刻和关断时刻之间,根据(或可以对应于)调节信号来确定。
[0028]
各种实施例还涉及电子谐振转换器,包括:
[0029]-用于接收输入电压的两个输入端子以及用于提供输出电压或输出电流的两个输出端子;
[0030]-包括初级绕组以及第一和第二次级绕组的变压器;
[0031]-经由谐振回路而被连接到初级绕组的切换级;
[0032]-在两个输出端子之间,与第一次级绕组串联连接的第一同步整流器fet;
[0033]-在两个输出端子之间,与第二次级绕组串联连接的第二同步整流器fet;以及
[0034]-如本文所述的两个同步整流器驱动器电路。
附图说明
[0035]
现在将参考附图来描述本公开的实施例,附图纯粹以非限制性示例的方式提供并且其中:
[0036]
本公开的特征和优点将从其实际实施例的以下详细描述中变得明显,实施例在附图中通过非限制性示例的方式示出,其中:
[0037]-图1示出了根据比较示例的llc谐振转换器的电路原理图;
[0038]-图2示出了图1谐振转换器的控制电路的框图;
[0039]-图3示出了llc谐振转换器的电路示意图,谐振转换器包括同步整流器,同步整流器包括两个同步整流器开关和同步整流器驱动器电路;
[0040]-图4和图5示出了图3的同步整流器驱动器电路的典型操作波形;
[0041]-图6示出了用于控制图3的同步整流器开关的信号的详细视图;
[0042]-图7、图8、图9和图10示出了由图6电路中的杂散电感引入的预期效应;
[0043]-图11、图12、图13、图14和图15示出了根据本公开的第一方面的能够补偿预期效应的同步整流器的各种实施例;以及
[0044]-图16和图17示出了根据本公开的第二方面的能够补偿预期效应的同步整流器的各种实施例。
具体实施方式
[0045]
在随后的描述中,各种具体细节被图示,旨在能够深入理解实施例。实施例可以在没有一个或多个具体细节的情况下或者利用其他方法、组件、材料等来提供。在其他情况下,未详细示出或描述已知的结构、材料或操作,使得实施例的各个方面不会被模糊。
[0046]
在本说明书的框架中对“实施例”或“一个实施例”的引用意在指示关于实施例描述的特定配置、结构或特征被包括在至少一个实施例中。因此,在本说明书的各点中可能出现的诸如“在实施例中”、“在一个实施例中”等短语不一定指代同一实施例。此外,在一个或多个实施例中,特定的构象、结构或特性可以以任何适当的方式来组合。
[0047]
本文中使用的附图标记仅为了方便起见,并且因此不限定保护范围或实施例的范围。
[0048]
图1示出了llc谐振转换器20的一个示例。通常,电子转换器20包括:
[0049]-正输入端子200a和负输入端子200b,用于接收直流输入电压vin;以及
[0050]-正输出端子202a和负输出端子202b,用于提供经调节的(直流)输出电压vout或输出电流iout。
[0051]
例如,输入电压vin可以由直流电压发生器10(诸如电池)来提供。然而,输入电压vin也可以例如借助整流器电路(诸如桥式整流器)以及可选的滤波器电路(诸如电容器)而
从交流电压获得。相反,经调节的输出电压vout或输出电流iout可以被用于为负载30供电。
[0052]
在所考虑的示例中,电子转换器20包括半桥,半桥包括两个电子开关sw1和sw2,诸如fet,诸如n沟道fet,例如nmos,两个电子开关sw1和sw2(例如,直接)串联连接在输入端子200a和200b之间,其中负输入端子200b通常表示第一接地gnd1。例如,在所考虑的示例中,晶体管sw1的漏极端子被直接连接到端子200a,晶体管sw1的源极端子被直接连接到晶体管sw2的漏极端子并且晶体管sw2的源极端子被直接连接到端子200b。
[0053]
因此,半桥sw1、sw2经由输入电压vin供电,并且电子开关sw1和sw2之间的中间节点(例如,晶体管sw1的漏极端子)表示切换节点hb。
[0054]
在所考虑的示例中,电子开关sw1和sw2之间的切换节点hb被连接到(谐振)电路块。
[0055]
具体地,在所考虑的示例中,该电路包括变压器t,变压器t包括初级绕组t1和中心分接次级绕组,中心分接次级绕组包括串联连接的第一次级绕组t2a和第二次级绕组t2b。
[0056]
在所考虑的示例中,变压器t的初级绕组t1与电容器cr和第一电感ls连接(例如,直接连接)在切换节点hb与负端子200b之间。此外,第二电感lp与初级绕组t1(例如,直接)并联连接。因此,在考虑电容器cr的示例中,第一电感ls和第二电感lp被串联连接(由此衍生出命名llc转换器),并且电感lp被并联连接到初级绕组t1。例如,在图1中,电容器cr的第一端子被(例如,直接)连接到切换节点hb,电容器cr的第二端子经由电感ls而被(例如,直接)连接到初级绕组t1的第一端子并且初级绕组t1的第二端子被(例如,直接)连接到端子200b。
[0057]
在实际的变压器t中,无论如何,两个绕组t1和t2并不是完美耦合的,并且变压器t还包括漏电感和磁化电感。基本上,这样的漏电感可以经由与初级绕组t1串联连接的电感来建模。相反,变压t的磁化电感(用于对磁通量建模)可以使用与初级绕组t1并联连接的电感来建模。因此,电感ls可以在于变压器t的漏电感,可以利用与初级绕组t1串联连接的电感器来实现,或者可以由变压器t的漏电感和这样的电感器两者来产生。类似地,电感lp可以在于变压器t的磁化电感,可以利用与初级绕组t1并联连接的电感器来实现,或者可以由变压器t的磁化电感和这样的电感器两者来产生。因此,通常,电感lp和ls以及变压器t可以被集成在单个组件中。
[0058]
如前所述,在图1中,在次级侧上使用中心分接头布置,即,次级绕组包括第一、第二和中心分接头端子。具体地,在所考虑的示例中,中心分接头端子被(例如,直接)连接到输出端子202a/202b中的一个,并且次级绕组t2的第一和第二端子经由相应的二极管d2和d1而被(例如,直接)连接到另一输出端子202a/202b。例如,在所考虑的示例中,中心分接头端子被(例如,直接)连接到输出端子202b,并且次级绕组t2的第一和第二端子被(例如,直接)连接到相应二极管d1和d2的阳极,并且二极管d1和d2的阴极被(例如,直接)连接到端子202a。因此,由于二极管d1和d2的整流功能,端子202a对应于正输出端子,并且端子202b对应于负输出端子,负输出端子通常对应于第二接地gnd2。然而,通过将二极管d1和d2的取向反转,端子202b将对应于正输出端子。
[0059]
通常,电子转换器20还可以包括在整流器与输出端子202a和202b之间连接的输出滤波器。例如,在图1中,电容器cout被(例如,直接)连接在输出端子202a和202b之间。
[0060]
在所考虑的示例中,电子开关sw1和sw2的控制端子(例如,相应fet的栅极端子)经
由驱动器电路210来驱动,驱动器电路210被配置为针对电子开关sw1和sw2,生成相应的驱动信号hsgd和lsgd。
[0061]
如前所述,驱动器电路210通常将开关sw1和sw2驱动为将频率接近谐振电路频率的方波施加到切换节点hb。通过这种方式,谐振回路(lp、ls和cr)充当调谐滤波器,并且电流由傅立叶级数发展的单个基频谐波形成,因此实际上是正弦的。
[0062]
更具体地,驱动器电路210通常被配置为生成驱动信号hsgd和lsgd,以为每个切换周期重复以下四个阶段:
[0063]-在第一时间间隔期间,闭合第一电子开关sw1并且断开第二电子开关sw2,由此切换节点hb被连接到正输入节点200a,即,输入电压vin;
[0064]-在第二时间间隔期间,断开第一和第二电子开关sw1/sw2;
[0065]-在第三时间间隔期间,断开第一电子开关sw1并且闭合第二电子开关sw2,由此切换节点hb被连接到负输入节点200a,例如,接地gnd1;以及
[0066]-在第四时间间隔期间,断开第一和第二电子开关sw1/sw2。
[0067]
为了使用谐振电路的谐振来实现软切换,第二和第四时间间隔可能是有用的。例如,图1中所示的llc拓扑允许初级侧开关sw1和sw2的zvs(零电压切换)和次级侧二极管d1和d2的zcs(零电流切换),因此允许以高效率、在高切换频率下操作转换器。
[0068]
因此,在所考虑的示例中,电子转换器经由输出端子202a和202b来提供电压vout和电流iout。通常,闭环(通常利用负反馈控制系统来实现)因此在改变操作条件(例如,输入电压vin和/或输出负载30的变化)时,保持转换器的输出电压vout或输出电流iout恒定。如前所述,转换器输出电压vout或输出电流iout的调节通过改变方波在切换节点hb/谐振回路的输入处的切换频率来实现。
[0069]
例如,图2示出了通用半桥谐振转换器20的控制电路的示例。
[0070]
如前所述,半桥谐振转换器20包括半桥,半桥包括在电子转换器20的输入端子200a和200b之间串联连接的两个电子开关。此外,转换器20包括电路204,电路204包括谐振回路(例如,电容器cr、电感ls和lp以及变压器t)、整流器电路(例如,二极管da和db)和可选的滤波器电路(例如,电容器cout)。具体地,电路204在一侧被连接到切换节点hb(在电子开关sw1和sw2之间)和负输入端子200b(或者备选地,正输入端子200a)来接收基本方波信号,并且在另一侧被连接到输出端子202a和202b来提供输出电压vout或输出电流iout。
[0071]
为了实现闭环控制,转换器20包括被配置为监视输出电压vout(对于电压源)或输出电流iout(对于电流源)的传感器212。例如,在图2中,转换器20被配置为提供调节电压。因此,传感器212可以是被配置为监视输出电压vout的电压传感器。例如,在图2中,使用包括两个电阻器r1和r2的分压器,两个电阻器r1和r2被连接在端子202a和202b之间,由此电压传感器提供与输出电压vout成比例的测量信号。
[0072]
由传感器212提供的测量信号(指示电流iout或电压vout)被提供给误差放大器,误差放大器被配置为生成误差信号er。例如,误差放大器可以将测量信号与诸如参考电压vref的参考信号进行比较,并且生成指示测量信号与参考电压vref之间的差的误差信号er。
[0073]
在所考虑的示例中,误差信号er然后被提供给驱动器电路210来修改给定控制量x,其中在每个切换周期期间传递的能量基本上依赖于控制量x(例如,开关sw1和sw2的切换
频率)。通常,误差信号er可以被直接或者例如经由光耦合器218(其通常用于隔离式电子转换器的情况)间接地提供给驱动器电路210。此外,被提供给驱动器电路210的误差信号er或者指示(例如,成比例)误差信号er的信号(例如,在还使用光耦合器218的情况下)可以是任何合适的控制信号,诸如电压vc或电流ic。
[0074]
通常,误差放大器利用运算放大器214来实现,运算放大器214在输入处接收测量信号(例如,在反相/负输入处)和参考信号(例如,在非反相/正输入处)。此外,运算放大器214具有相关联的反馈网络216,反馈网络被连接在运算放大器的输出和输入端子之一(通常为反相输入端子)之间。例如,反馈网络216可以包括用于将误差放大器实现为具有比例(p)组件(例如,经由电阻器)和/或积分(i)组件(例如,经由电容器)的调节器的组件。因此,通常,反馈网络216实现误差放大器的滤波器。例如,这样的滤波器216可用于选择误差放大器的适当频率响应,例如以确保:
[0075]-稳定的控制回路(即,在转换器的操作条件受到干扰时,一旦扰动引起的瞬态消退,输出参数vout/iout就趋于恢复恒定的稳态);
[0076]-良好的调节(即,扰动后由输出参数vout/iout恢复的新常数值非常接近扰动前的值);以及
[0077]-良好的动态性能(即,在扰动后的瞬态期间,输出参数vout/iout不会过度偏离期望值并且瞬态本身很短)。
[0078]
如图3所示,为了改进谐振变换器的效率,次级侧上的二极管d1和d2(图1)经常被替换为同步整流(sr)电子开关sr1和sr2,它们被同步整流器驱动器222控制来模拟理想二极管。
[0079]
为了简化同步整流器开关sr1和sr2的驱动,每个同步整流器开关sr1和sr2的端子之一通常被接地(例如,隔离转换器的gnd2)。
[0080]
例如,在图3中,同步整流器电子开关利用n沟道fet(诸如mosfet)来实现。
[0081]
因此,在图3中,次级侧上的剩余连接也发生了变化,即:
[0082]-变压器t的中心分接头端子被(例如,直接)连接到(正)输出端子(202a);
[0083]-次级绕组t2的第一端子(绕组的端子t2a)被(例如,直接)连接到同步整流器fet sr2的第一(漏极)端子,并且同步整流器开关sr2的第二(源极)端子被(例如,直接)连接到(负)端子202b,端子202b表示接地gnd2;以及
[0084]-次级绕组t2的第二端子(绕组的端子t2b)被(例如,直接)连接到同步整流器fet sr1的第一(漏极)端子,并且同步整流器开关sr1的第二(源极)端子被(例如,直接)连接到(负)端子202b。
[0085]
同样,电容器cout可以被(例如,直接)连接在输出端子202a和202b之间。
[0086]
图3还示出了电容器cr可以不被连接在初级绕组t1和切换节点hb之间,而是连接在初级绕组t1和端子200b(例如,接地gnd1)之间。
[0087]
同步整流器驱动器222的核心功能是:每当对应的变压器半绕组t2a或t2b开始传导时,使每个同步整流器开关sr1和sr2导通。
[0088]
具体地,当使用fet时,同步整流器开关sr1和sr2中的每一个还关联了体二极管。通常,每个同步整流器开关sr1和sr2因此可以具有相关联的(特别是并联连接的)二极管。因此,在该情况下,同步整流器驱动器222应在相应二极管开始传导时导通给定的同步整流
器开关sr1和sr2,并且在流动电流接近零时关断同步整流器开关。
[0089]
为了实现高效率,整流器驱动器222也可以控制通道传导时间,尽量减少二极管传导时间。
[0090]
已提出了若干技术来控制(例如,llc)谐振转换器的同步整流器开关sr1和sr2。解决方案可以被分组为两个类型:电压驱动控制和电流驱动控制。后一组使用流经同步整流器开关sr1和sr2的电流i
sr1
和i
sr2
。通常,电流i
sr1
和i
sr2
可以经由与同步整流器开关sr1和sr2串联连接的一个或多个电流传感器来直接测量,或者可以通过经由电流变压器来测量流经初级侧的电流来估计。这两种情况都以牺牲额外组件为代价而能达到高精度;并且需要影响效率的大尺寸电流变压器。
[0091]
电压驱动解决方案基于对同步整流器开关sr1和sr2的电流路径的端子之间(例如,相应fet的漏极和源极端子之间)的电压dvs1和dvs2的测量。
[0092]
例如,图4示出了以下各项的可能波形:流经同步整流器开关sr1和sr2的电流i
sr1
和i
sr2
、以及同步整流器开关sr1和sr2处的电压dvs1和dvs2、以及同步整流器开关sr1和sr2的驱动信号gd1和gd2。
[0093]
此外,图5示出了流经同步整流器开关sr1和sr2之一的电流i
sr1
和i
sr2
以及相应电压dvs和驱动信号gd的详细视图。
[0094]
波形示出了次级绕组t2基本上提供正弦波,其中在第一半周期期间,同步整流器开关sr1应闭合(sr2断开),并且在第二半周期期间,同步整流器开关sr2应闭合(sr1断开)。
[0095]
因此,每个半周期可以被划分为三个区域(a)、(b)和(c)。
[0096]
在第一区域(a)期间,即,在同步整流器开关被导通之前(即,相应信号gd为低),电压dvs下降,变为负值,并且相应的二极管在给定阈值vth_on(高于或低于-0.7v,对应于二极管的正向电压)处开始传导。
[0097]
一旦同步整流器开关sr在时刻t1处被导通,以下区域(b)开始。在该区域(b)期间,电压dvs下降至:
[0098]
dvs=r
dson
·isr
,
ꢀꢀꢀ
(1)
[0099]
其中r
dson
对应于同步整流器开关sr的导通电阻。因此,电压dvs在该区域期间具有正弦特性(并且考虑电流i
rs
和电压dvs的方向,与电流i
rs
相对)。
[0100]
因此,在区域(b)期间,电压下降然后又上升。因此,当电流i
rs
再次接近零时,当电压dvs达到给定第二阈值v
th_off
时,同步整流器开关sr可以被关断。
[0101]
一旦同步整流器开关sr被关断(并且假设绕组仍在传导),电压dvs再次下降到二极管的正向电压(大约-0.7v)。电压dvs然后增加,直到变压器绕组t2处的电压反向。
[0102]
因此,由于与电阻压降(通常在10-20mv范围内)相比,二极管导通的正向偏置(700mv)导致更高的电压降,因此阶段(a)和(c)期间的功率损耗比阶段(b)期间高得多。
[0103]
图6再次示出了llc转换器示意图,其中初级绕组t1处的电压v
p
和次级绕组t
2a
和t
2b
处的电压v
sa
和v
sb
被示出。
[0104]
通常,由于变压器的耦合,电压对应于v
sa
和v
sb
,即,v
sa
=v
sb
=vs。具体地,假设初级绕组具有n
p
个绕组,次级绕组具有ns个绕组,则每个切换周期的电压vs可以被确定如下:
[0105]
[0106]
此外,由于连接,以下关系适用:
[0107]-v
sa
+dvs2=v
sb
+dvs1。
ꢀꢀꢀ
(3)
[0108]
因此,在稳态条件下,即,当电容器c
out
被充电至所请求的输出电压v
out
时,电压dvs1和dvs2的最大值交替为:
[0109]-在第一切换半周期期间,电压降dvs1可以忽略,并且电压dvs2对应于2
·vout
;以及
[0110]-在第二切换半周期期间,电压降dvs2可以忽略,并且电压dvs1对应于2
·vout
。
[0111]
因此,必须考虑该最大值来为同步整流器开关sr1和sr2选择正确的电子开关。
[0112]
此外,实际上,在电子转换器的切换活动期间经常出现尖峰。例如,这样的尖峰通常由前一周期中的电流反向以及llc转换器在谐振以上工作时生成。这些尖峰意味着例如必须使用性能较低且成本较高的更高电压等级的sr mosfet。
[0113]
在该方面,示例解决方案旨在通过避免(或至少减少)电流反向来限制电压尖峰,然而这并不总是可能的。
[0114]
在以下描述的图7至17中,已参考图1至图6描述的部件、元件或组件由这些图中先前使用的相同附图标记来表示。这些元素的描述已进行并且在下文中将不再重复,以免加重本详细描述的负担。
[0115]
如上所述,本说明书的各种实施例涉及用于确定关断同步整流器开关的关断时刻的解决方案。
[0116]
如关于等式(1)所述,在每个区域/时间间隔(b)期间,由同步整流器控制器222测量的相应电压dvs1和dvs2与相应同步整流器开关sr1/sr2的导通电阻r
dson
成比例.
[0117]
然而,发明人已观察到并且也如图7所示,实际上电子电路还包括寄生电感,寄生电感可以利用与同步整流器开关sr1/sr2(的电流路径)串联连接的电感l
sr
来建模,其中电感l
sr
可以被计算为:
[0118]
l
rs
=l
ds
+l
trace
。
ꢀꢀꢀꢀꢀ
(4)
[0119]
其中,l
ds
表示同步整流器开关sr1/sr2在(电流路径的)端子之间、例如在相应fet的漏极和源极端子之间的电感,并且l
trace
表示用于将同步整流器开关sr1/sr2连接到同步整流器控制器222的印刷电路板迹线的附加电感。
[0120]
因此,同步整流器控制器222确实监视电压dvs',该电压与同步整流器开关sr1/sr2的端子处的电压dvs不完全对应,但是:
[0121][0122]
发明人已观察到并且也如图8所示,同步整流器控制器222将关于区域(b)的开始(即,关于信号gd的上升沿)确定:当电压dus确实达到关断阈值v
th_off
时,所测量的电压dus'在时间δt'之后、而不是在预期时间δt之后达到关断阈值v
th_off
(也参见图5),其中δt=δt'+t
lsray
,即,电压dus'的过零发生在电压dvs的过零之前,该电感l
sr
在上述范围内引入了预期效应。
[0123]
在第一近似中,可以假设该预期效应是恒定的,即,可以假设t
lsray
恒定。然而,如下文将更详细地描述的,该近似可能不够准确。
[0124]
以下将讨论该预期效应的可能近似。
[0125]
具体而言,在下文中将假设次级侧处的电流is=i
rs1
+i
rs2
在切换周期(的至少最后一部分)期间,即,至少在区域/间隔(b)的结束处具有基本正弦的形状,即:
[0126]isr
(t)=i
pk
·
sin(ω
sw
·
t),
ꢀꢀꢀ
(6)
[0127]
其中i
pk
表示振荡振幅。例如,如前文所述,对于(例如,llc)谐振转换器而言,特别是当在转换器的谐振回路的基本谐振频率附近操作时,通常是这种情况。
[0128]
在这种情况下,所测量的电压dvs'可以被写为(至少在区域(b)的结束处):
[0129]
dvs
′
=r
dson
·ipk
·
sin(ω
sw
·
t)+l
rs
·
ω
sw
·ipk
·
cos(ω
sw
·
t)。
ꢀꢀꢀ
(7)
[0130]
发明人已观察到,该表达式可以通过拆分时间分量和相移分量来重写为:
[0131][0132]
其中时间t
lrs
表示l
rs
预期:
[0133][0134]
等式(8)可以被进一步重新表述为:
[0135][0136]
最后,通过比较等式(7)和等式(10),可以观察到:
[0137][0138][0139]
这允许获得相移表达式:
[0140][0141]
因此,等式(9)可以被重新表述如下:
[0142][0143]
假设l
rs
/r
dson
通常显著小于1/ω
sr
并且假设预期时间t
lrs
是常数,等式(12)可以被近似为:
[0144][0145]
图9示出了对于示例性情况l
sr
=4nh和r
dson
=4mω,预期时间t
lrs
与切换频率f
sw
的示例。具体而言,线100示出了等式(13)的近似的行为,而线102示出了等式(12)的行为,因此也考虑了切换频率f
sw
,其中ω
sr
=2πf
sw
。
[0146]
因此,一般而言,对于每个频率,在实际值(线102)和近似值(线100)之间都存在误差δt
lsr
。
[0147]
图10在该方面示出了对于不同值t'
lsr
=l
rs
/r
dson
的误差δt
lsr
的示例。例如,线104、106、108和110分别示出了t'
lsr
=250ns、1μs、2μs和4μs时的行为。
[0148]
图10还强调了当值t'
lsr
增加时,简单的近似可能会导致非常高的误差。
[0149]
例如,在从高负载电流到低负载电流瞬变之后,llc转换器的初级回路(参见例如图2)可能会增加频率来补偿输出电压v
out
调节。该频率变化可能导致切换频率在10%-15%
的数量级发生变化,从而导致值δt
lsr
发生变化。
[0150]
发明人已观察到,在驱动同步整流器开关sr1和sr2时,应考虑该可变的预期效应。
[0151]
以下现在将描述在同步整流器控制器/驱动器电路222a内实现的新驱动方法的实施例,同步整流器控制器/驱动器电路222a被配置为驱动两个同步整流器开关sr1和sr2,诸如关于图1至图6所述的(例如,llc)谐振转换器的同步整流器开关sr1和sr2。
[0152]
具体地,在各种实施例中,同步整流器驱动器电路222a被配置为通过还考虑电子(例如,llc)转换器的负载电流,即,提供给负载30的电流i
out
(参见图1)来驱动同步整流器开关sr1和sr2。
[0153]
通常,还存在已考虑负载电流的其他解决方案。例如,可以参考文献us 2017/0085188 a1,该文献公开了用于两个同步整流器开关sr1和sr2的驱动器电路。实质上,该文档描述了两个同步整流器mosfet的栅极驱动策略,栅极驱动策略优化了在沿所有传导窗口施加恒定电压的所有负载条件下的转换效率。
[0154]
相反,本公开的各个实施例提出了新的栅极驱动策略,新的栅极驱动策略在下文中被标识为“dvs shaping gate driving”(缩写为dvs sgd),其试图尽可能地减少电流反向。
[0155]
具体地,在各种实施例中,同步整流器驱动器电路222a被配置为根据电压dvs的瞬时值,而不是文献us 2017/0085188 a1中描述的电压dvs的平均值,改变同步整流器开关sr1和sr2的驱动电压,例如相应(例如,n沟道)fet的栅极电压。
[0156]
具体地,通过改变驱动信号gd(即,gd1或gd2)的振幅,同步整流器驱动器电路222a能够改变相应同步整流器fet sr1或sr2的导通电阻r
dson
。具体而言,如等式(12)和(13)所示,当导通电阻r
dson
增加时,预期时间t
lrs
减少。
[0157]
因此,在各种实施例中,同步整流器驱动器电路222a被配置为:当给定的同步整流器fet sr1或sr2导通时,改变驱动信号gd,使得相应同步整流器fet sr1或sr2的导通电阻r
dson
在导通脉冲结束时、即在间隔/区域(b)结束时(另请参见图5)增加。
[0158]
具体地,如图11a所示,在各种实施例中,驱动同步整流器驱动器电路222a可以被配置为根据电压dvs(或者更准确地测量电压dvs')来直接改变驱动信号gd:
[0159]
gd=v
x
+k
·
|dvs
′
|。
ꢀꢀꢀ
(14)
[0160]
以上等式可以根据等式(5)来重新表述:
[0161][0162]
发明人已观察到,当电流i
sr
接近过零时,电阻r
dson
应被改变来获得趋向于(恒定偏移)值v
x
的电压gd。
[0163]
当电流i
sr
接近零时,电感l
sr
的作用有助于降低电压gd,从而增加电阻r
dson
。这允许避免(或者至少减少)电流反向,而代价是转换效率的小幅降低。
[0164]
为了提供不依赖于l
sr
值的设计指标,其值在下文中将被假定为零,即:
[0165]
gd=v
x
+k
·rdson
·isr
。
ꢀꢀꢀꢀꢀꢀ
(16)
[0166]
该假设并不缺乏普遍性,而实际上有助于改进对寄生效应的抗扰度,从而导致同步整流器fet的预期开关。事实上,电感l
sr
仅导致比等式(16)中所示的值更低的gd值,从而对于给定电流i
sr
,增加了实际导通电阻r
dson
和电压|dvs|。
[0167]
图11a示出了用于同步整流器fet sr1或sr2中的每一个的同步整流器驱动器电路222a的操作的实施例。
[0168]
通常,由于初级绕组t1处的切换活动,给定同步整流器fet sr1或sr2处的电压dvs将在时刻t0变为负值。
[0169]
在各种实施例中,在该阶段(a)期间,同步整流器驱动器电路222a被配置为将电压dvs与阈值电压v
th_on
进行比较。考虑到电压dvs的方向,该阈值电压具有负值。例如,为此目的,同步整流器驱动器电路222a可以包括模拟比较器。
[0170]
在所考虑的实施例中,当电压dvs在时刻t1处达到阈值电压v
th_on
时,同步整流器驱动器电路222a生成驱动信号gd来闭合同步整流器fet sr1或sr2。
[0171]
如前所述,所公开的控制方法主要被用于确定关断时刻t2。
[0172]
通常,同步整流器驱动器电路222可以在时刻t1和t2之间的整个持续时间使用等式(14)。然而,为了减少切换损耗,同步整流器驱动器电路222可以使用阶段(b)期间的一部分,其中同步整流器驱动器电路222针对驱动信号gd来使用恒定或预定值。
[0173]
例如,在各种实施例中,同步整流器驱动器电路222被配置为使用:
[0174]-第一模式m1,其中同步整流器驱动器电路222将驱动信号gd设置为给定(恒定或预定)值;以及
[0175]-第二模式,其中同步整流器驱动器电路222根据信号dvs来改变驱动信号gd。
[0176]
具体地,在各种实施例中,同步整流器驱动器电路222在阶段(b)期间的时刻t3和时刻t2之间使用模式m2。相反,同步整流器驱动器电路222可以被配置为在阶段(b)的剩余初始部分期间(在时刻t1和t3之间)使用:
[0177]-仅模式m1(在时刻t1和t3之间),或者
[0178]-第一模式m2(在时刻t1和时刻t4之间),然后是模式m1(在时刻t4和t3之间)。
[0179]
例如,在各种实施例中,同步整流器驱动器电路222可以被配置为通过以下方式来确定时刻t3:
[0180]-向时刻t1添加恒定或预定的时间间隔;或者
[0181]-确定电压dvs的绝对值何时降低并达到给定阈值。
[0182]
类似地,同步整流器驱动器电路222可以被配置为通过以下方式来确定时刻t4:
[0183]-向时刻t1添加恒定或预定的时间间隔;或者
[0184]-确定电压dvs的绝对值何时增加并达到给定阈值。
[0185]
例如,如图11b所示,在时刻t1和t2之间,电流i
sr
将具有正弦或部分正弦行为,并且将在时刻t3处达到峰值。同样,所测量的电压dvs将在给定时刻处达到峰值dvs
pk
。
[0186]
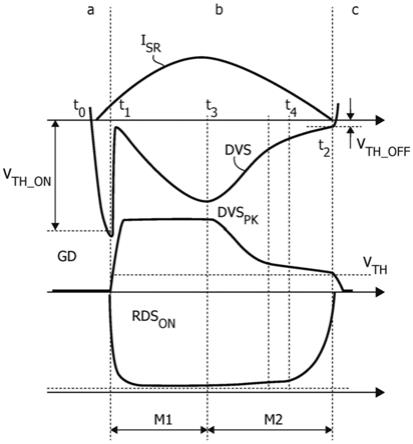
具体地,在所考虑的实施例中,同步整流器驱动器电路222a将该时刻用于时刻t3。因此,在各种实施例中,同步整流器驱动器电路222a被配置为确定或估计该时刻t3。例如,同步整流器驱动器电路222a可以被配置为:
[0187]-通过检测信号dvs达到其峰值dvs
pk
的时刻来确定时刻t3;或者
[0188]-确定给定切换半周期的中间值,并且将该时刻用于时刻t3;或者
[0189]-通过检测信号dvs达到给定(优选固定)阈值电压(诸如40mv)的时刻来确定时刻t3。
[0190]
例如,同步整流器驱动器电路222a可以通过以下方式来确定给定切换半周期的中
间值:
[0191]-从电路210接收触发信号;
[0192]-监视用于开关sw1和sw2的驱动信号;或者
[0193]-确定导通时刻t1和关断时刻t2之间的持续时间,并且针对给定周期k来将时刻t3(k)计算为:
[0194]
t3(k)=t1(k)+(t2(k-1)
–
t1(k-1))/2。
[0195]
具体地,在所考虑的实施例中,同步整流器驱动器电路222a被配置为生成具有两种模式的驱动信号gd:
[0196]-在导通时刻t1和所检测/估计的时刻t3之间,具有第一模式m1,以及
[0197]-在所检测/估计的时刻t3和关断时刻t2之间,具有第二模式m2。
[0198]
具体地,如前所述,在各种实施例中,同步整流器驱动器电路222a在第一模式m1期间将驱动信号gd设置为给定的恒定电压,诸如3v或者通常大于同步整流器fet sr1或sr2的关断阈值v
th_off
的电压。
[0199]
具体地,在各种实施例中,同步整流器驱动器电路222a在第一模式m1期间将驱动信号gd设置为:
[0200]
gd=v
x
+k
·
|dvs
′
pk
|。
[0201]
在各种实施例中,值dvs'
pk
可以对应于以下项之一:
[0202]-先前切换周期的峰值dvs
pk
或者其经滤波的版本,诸如多个切换周期的峰值dvs
pk
的平均值;或者
[0203]-信号dvs在先前切换周期的时刻t3处的采样版本,或者其经滤波的版本,诸如多个切换周期的值dvs(t3)的平均值。
[0204]
相反,在第二模式m2期间,同步整流器驱动器电路222a如等式(15)所示来改变信号gd。
[0205]
以上操作也如图11b所示,其中:
[0206]-电压gd在导通时刻t1和所检测/估计的时刻t3之间恒定,
[0207]-电压gd然后与电压dvs成比例地减小,直到电压dvs在t2时刻处达到同步整流器fet sr1或sr2的阈值电压v
th
并且同步整流器fet sr1或sr2被关断。
[0208]
图11b还示出同步整流器fet sr1或sr的导通电阻rds
on
在导通时刻t1和时刻t4之间基本保持恒定,然后在接近关断时刻t2时显著增加。
[0209]
如前所述,在各种实施例中,同步整流器驱动器电路222a在电压dvs达到阈值v
th_off
的时刻t2之后将信号gd设置为零。为了在电流i
sr
变为正值之前处理关断阶段,等式(14)可以被修改为包括项δv:
[0210]
gd=v
x-δv+k
·
|dvs
′
|。
ꢀꢀꢀꢀꢀ
(17)
[0211]
因此,在各种实施例中,必须选择三个变量v
x
、k和δv。例如,在各种实施例中,考虑了一系列设计指标。
[0212]
通常,当电流i
sr
接近过零时,导通电阻r
dson
的值必须增加。因此,本质上,当i
sr
接近零(i
sr
→
0)时,电压gd应对应于给定值v
th
,该值足以以高r
sdson
来切换同步整流器fet,即:
[0213]
gd=v
th
=v
x
。
ꢀꢀꢀꢀ
(18)
[0214]
当fet的阈值电压v
th
具有最小值v
th,min
时,该条件在最坏的情况下也应被满足。例
如,最小值v
th,min
必须考虑温度漂移和技术传播,即:
[0215]
gd=v
th,min
=v
x
。
ꢀꢀꢀ
(19)
[0216]
此外,为了在gd=v
th,min
时保证适当的寄生效应抗扰度,电压dvs的振幅(即,|dvs|)不应小于给定最小值dvs
sat
,即,在最坏情况下:
[0217]
gd=v
th,min-δv+k
·
|dvs
sat
|。
ꢀꢀꢀꢀ
(20)
[0218]
因此,通过将等式(18)和(20)组合:
[0219]
δv=k
·
|dvs
sat
|。
ꢀꢀꢀꢀ
(21)
[0220]
发明人已观察到值dvs
sat
应被选择作为噪声抗扰度和电路速度之间的折衷。较高的dvs
sat
值提供更好的噪声抗扰度(较少的预期关断),并且它需要信号gd的较低变化率。
[0221]
此外,当电压|dvs|变得高于给定最大值|dvs
max
|的比率α时,信号gd应具有其最大值gd
max
,以将转换器效率最大化。通常,最大值gd
max
与同步整流器驱动器电路222a的电源电压vcc以及用于生成信号gd的可能电压降v
drop
相关,即,gd
max
=vcc-v
drop
。
[0222]
在各种实施例中,考虑导通电阻r
dson
和最大电源来确定值dvs
max
。
[0223]
例如,基于等式(17)、(18)和(20):
[0224]
gd
max
=v
th,min-δv+k
·
|α
·
dvs
max
|
ꢀꢀ
(22)
[0225]
gd
max
=v
th,min-k
·
|dvs
sat
|+k
·
|α
·
dvs
max
|
ꢀꢀ
(23)
[0226]
gd
max
=v
th,min
+k
·
(|α
·
dvs
max
|-|dvs
sat
|)。
ꢀꢀꢀ
(24)
[0227]
因此,参数k可以被计算为:
[0228][0229]
综上所述,在各个实施例中,参数v
x
、k和δv被选择如下:
[0230]vx
=v
th
,
min
[0231][0232]
δv=k
·
|dvs
sat
|。
ꢀꢀꢀ
(26)
[0233]
例如,假设同步整流器mosfet sr1和sr2是ipp084n06l4晶体管,这些晶体管具有8.1mω的导通电阻r
dson
和2.7v的典型阈值v
th_typ
,典型阈值具有0.5v的扩展δv
spread_from_ds
。因此,最小阈值v
th,min
可以被计算为2.7v
–
0.5v=2.2v(v
th_typ-δv
spread_from_ds
)。
[0234]
此外,假设电源电压vcc为12v并且电压降v
drop
为1v,则最大驱动电压gd
max
为11v。
[0235]
最后,通过将|dvs
sat
|选择为4mv,将|dvs
max
|选择为100mv并且将α选择为0.5,参数可以根据等式(26)来计算:v
x
=2.2v k=191和δv=764mv。
[0236]
如上所述,大部分使用的参数依赖于应用,即,电子转换器的操作参数,诸如电源电压vcc、同步整流器驱动器电路222a中的电压降v
drop
、并且还有参数|dvs
sat
|和|dvs
max
|可以被固定。因此,在各种实施例中,驱动器电路222a被配置为允许对最小阈值v
th,min
进行设置/编程,例如以允许使用不同的同步整流器fet。
[0237]
事实上,假设晶体管的最大阈值(v
th_typ+
δv
spread_from_ds
)为3.2v,以及上述参数v
x
、k和δv,驱动器电路将在|dvs
sat
|的最小值为9.2mv下操作(并且最大值gd
max
保持不变),这对于适当的fet关断和转换效率来说仍然是可以接受的。
[0238]
因此,如前所述,在各种实施例中,驱动器电路222a被配置为允许设置同步整流器开关sr1和sr2中的至少一个(并且优选地两者)的最小阈值v
th,min
。
[0239]
模拟解决方案的实施例在图12、图13和图14中示出。实施例之一的选择可能依赖于例如同步整流器驱动器222a的封装所使用的引脚数量和可设置的参数的最小值v
th,min
。
[0240]
通常,在所示的实施例中,同步整流器驱动器电路222a被配置为根据同步整流器开关(例如,sr1)的漏极和源极端子之间的电压dvs(或更准确地测量电压dvs'),生成信号gd
ctrl
,其指示(例如,成比例或对应于)待施加到同步整流器开关(例如,sr1)的栅极端子的信号gd的振幅。相应地,当使用集成电路中集成的同步整流器驱动器电路222a时,集成电路可以包括:
[0241]-端子2232,被配置为连接到接地,诸如图3所示的接地gnd2;
[0242]-端子2234,被配置为连接到电源电压vcc;
[0243]-端子2226,被配置为连接到同步整流器开关的漏极端子,从而在同步整流器开关的源极端子被连接到接地、即端子2232的情况下接收电压dvs;以及
[0244]-被配置为与同步整流器开关的栅极端子连接的端子(也参见图3),由此信号gd被施加到该端子。
[0245]
因此,当使用相同的同步整流器驱动器电路222a来驱动两个同步整流器开关sr1和sr2时,该电路222a包括图12和图13中所示的两个电路。
[0246]
在实施例中,同步整流器驱动器电路222a包括可变电流发生器2220,可变电流发生器2220被配置为根据电压dvs(dvs')、例如在端子2226处接收的电压(的瞬时值)来生成电流i1。具体地,在各种实施例中,电流i1与电压dvs成比例:
[0247][0248]
如前所述,同步整流器驱动器电路222a在阶段(b)的给定时段期间,确实可以使用两个模式m1和m2。例如,如图15所示,同步整流器驱动器电路222a可以为此目的而包括:
[0249]-采样保持电路2240,被配置为对值dvs'
pk
'进行采样;
[0250]-电子开关2242,被配置为向可变电流发生器2220选择性地提供电流值dvs、值dvs'
pk
或零电压;以及
[0251]-控制电路2244,被配置为驱动电子开关2242。
[0252]
例如,采样保持电路2240可以利用模拟峰值检测器来实现,或者采样保持电路被配置为响应于由控制电路2244提供的触发信号来对信号dvs进行采样,其中触发信号发出信号通知时刻t3。
[0253]
根据先前的描述,控制电路2244可以被配置为经由电子开关2242来将以下项提供给可变电流发生器2220:
[0254]-在时刻t1和t3之间,由采样保持电路2240提供的值dvs'
pk
;
[0255]-在时刻t3和一个时刻t2之间,在引脚2226处接收的值dvs;以及
[0256]-在该时刻t2之后(并且直到下一时刻t1),零电压。
[0257]
为此,控制电路2244可以被配置为:
[0258]-例如通过经由第一比较器将信号dvs与阈值v
th_on
'进行比较来确定导通时刻t1;
[0259]-如前文所述,确定时刻t3;以及
[0260]-例如通过第二比较器将信号dvs与阈值v
th_off
进行比较来确定关断时刻t2。
[0261]
第二比较器的速度应很高,以避免电流i
sr
的反向。事实上,由于i
sr
预期的降低,关断时刻t2现在非常接近电流i
sr
的过零。
[0262]
在图12中,电流发生器2220的输出被连接(例如,直接连接)到节点2228,节点2228进而被连接(例如,直接连接)到电阻器r2的第一端子,并且电阻器r2的第二端子经由齐纳二极管dz被连接(例如,直接连接)至接地/端子2232。在各种实施例中,电阻器r2和/或齐纳二极管dz可以在同步整流器驱动器电路222a的集成电路的外部。例如,为此目的,节点2228可以是这样的集成电路的端子,并且电阻器r2和齐纳二极管dz可以串联连接在端子2228和端子2232之间。
[0263]
因此,在图12中,信号gd
ctrl
对应于:
[0264][0265]
其中v
dz
对应于二极管dz的齐纳电压。
[0266]
在该情况下,通过比较等式(28)和(26),可以获得以下关系:
[0267]vdz
=v
th,min-δv,
[0268]
例如,对于上述示例值,v
dz
必须对应于1.436v。
[0269]
相反,在图13中,电流发生器2220的输出又被连接(例如,直接连接)到节点2228,节点2228进而被连接(例如,直接连接)到电阻器r2的第一端子,并且电阻器r2的第二端子被连接(例如,直接连接)到接地/端子2232。同样在该情况下,电阻器r2可以在同步整流器驱动器电路222a的集成电路的外部,即,节点2228可以是这样的集成电路的端子,并且电阻器r2可以被连接在端子2228和端子2232之间。
[0270]
因此,在所考虑的实施例中,以下电压v
ref_dvs
在节点2228处生成:
[0271][0272]
此外,在所考虑的实施例中,同步整流器驱动器电路222a包括第二电流发生器2222,其被配置为生成(恒定,但是可选地可设置/可编程的)电流i2。
[0273]
在所考虑的实施例中,电流发生器2222的输出被连接(例如,直接连接)到节点2230,节点2230进而被连接(例如,直接连接)到电阻器r3的第一端子,并且电阻器r3的第二端子被连接(例如,直接连接)到接地/端子2232。此外,电阻器r3可以在同步整流器驱动器电路222a的集成电路的外部,即,节点2230可以是这样的集成电路的端子,并且电阻器r3可以被连接在端子2230和端子2232之间。
[0274]
因此,在所考虑的实施例中,以下电压v
ref_vth
在节点2230处生成:
[0275]vref_vth
=r3·
i2。
ꢀꢀꢀ
(31)
[0276]
在所考虑的实施例中,电压v
ref_dvs
和v
ref_vth
被提供给电压加法器电路2224,电压加法器电路2224在输出处提供信号gd
ctrl
,即:
[0277]
gd
ctrl
=v
ref_dvs
+v
ref_vth
ꢀꢀꢀ
(32)
[0278]
[0279]
因此,假设电流i2恒定,则可以获得以下关系:
[0280]
r3·
i2=v
th,min-δv,
[0281]
例如,对于上述示例值,r3·
i2必须对应于1.436v。
[0282]
最后,在图14所示的实施例中,电流发生器2220的输出又被连接(例如,直接连接)到节点2228。在所考虑的实施例中,节点2228经由第一电阻器r2被连接(例如,直接连接)到输出电压vout/节点202a,并且经由第二电阻器r3被连接到接地,例如节点202b。在各种实施例中,电阻器r2和/或r3可以在同步整流器驱动器电路222a的集成电路的外部。例如,为此目的,节点2228可以是这样的集成电路的端子,并且电阻器r2和r3可以被串联连接在端子202a和202b之间,其中电阻器r2和r3之间的中间节点被连接到端子2228。通常,代替使用输出电压vout,电阻器r2和r3也可以被连接在任何其他(基本上)恒定电压之间。
[0283]
因此,在所考虑的实施例中,节点2228处的电压(对应于电压gd
ctrl
)可以类似于等式(32)而表示如下:
[0284]
gd
ctrl
=v
ref_dvs
+v
ref_vth
ꢀꢀꢀ
(35)
[0285]
其中第一项v
ref_dvs
可以被求解为:
[0286]vref_dvs
=v
out
·
r3(r2+r3)
ꢀꢀꢀ
(36)
[0287]
并且第二项v
ref_dth
可以被求解为:
[0288]vref_dth
=i1·
(r2//r3)=(dvs/r1)(r2//r3)。
ꢀꢀ
(37)
[0289]
因此,鉴于等式(14),以下对应关系可以被确定:
[0290]vx
=v
out
·
r3(r2+r3)
ꢀꢀ
(38)
[0291]
以及
[0292]
k=(r2//r3)/r1。
ꢀꢀꢀ
(39)
[0293]
因此,从电路的角度来看,图14所示的同步整流器驱动器电路222a的集成电路可以对应于图12中所示的同步整流器驱动器电路222a的集成电路,只是外部组件的连接可能发生变化。因此,该集成电路可以支持两种连接。
[0294]
相应地,关于图12至图15所示的电路提供了用于根据电压dvs来改变信号gd的低复杂度解决方案,其中信号gd可以被可选地设置为恒定值,例如,根据峰值dvs
pk
来确定。
[0295]
dvs sgd技术具有若干优点,例如:
[0296]-电流反向的发生减少,因为当同步整流器fet被驱动到接近阈值电压v
th
时,导通电阻r
dson
增加,从而降低电感l
rs
的预期效应,即,信号dvs的电压过零时刻对应于流经同步整流器fet的电流的零电流时刻;
[0297]-电流反向的相关影响、诸如dvs尖峰被减少,例如因为即使同步整流器fet延迟关断(即,在电流反向的情况下):
[0298]
1)高导通电阻r
dson
也不允许变压器次级绕组有高反向电流;并且
[0299]
2)负载电流i
out
仍流过同步整流器fet通道,而不流过与同步整流器fet体二极管相关联的二极管,即,不存在二极管反向恢复电荷,二极管反向恢复电荷的作用是对变压器次级绕组进行反向充电。
[0300]
上述关断方法具有应考虑的一些缺点。
[0301]
dvs sgd技术并不旨在获得信号gd能够在电流i
sr
接近零时保持电压dvs几乎恒定
的形状。这样的方法需要同步整流器开关的“真实”闭环驱动。dvs sgd技术只需要电压gd根据信号dvs(的瞬时值)来确定。然而,信号gd的该变化意味着导通电阻发生变化,并且因此信号dvs本身也发生变化。事实上,如图11所示,反馈回路确实存在并且经由同步整流器开关sr来闭合。该回路意味着信号gd(或dvs)的任何变化也会对信号dvs(或gd)产生影响。
[0302]
这可能导致从信号dvs信号传播到信号gd的振荡(噪声)。在各种实施例中,因此可以将(例如,低通)滤波器电路提供在:
[0303]-同步整流器开关sr的漏极端子与驱动电路22a的输入节点2226之间;和/或
[0304]-信号gd和同步整流器开关sr的栅极端子之间。
[0305]
通常,滤波量不应太高,否则会在例如实际电压dvs(前置滤波器)和测量电压dvs'(后置滤波器)之间引入高延迟。
[0306]
此外,当杂散电感l
sr
较大时,同步整流器开关sr仍可能过早关断,从而导致大电流i
sr
流过与同步整流器开关sr相关联的二极管,导致二极管反向恢复电荷以及随后的dvs尖峰。然而,与比较示例的解决方案相比,该影响仍然被降低,并且通过为参数k选择较低的值,回路稳定性可以被改进。
[0307]
然而,降低参数k意味着必须使用较小的电压gd(较高的r
dson
值)来获得所需的最终值dvs
sat
(例如,先前设计示例的4mv)。这样较低的电压gd可能需要同步整流器开关sr的更复杂的驱动器电路。
[0308]
图16示出了另一实施例,其中同步整流器驱动器电路222a使用电压dvs的闭环控制。
[0309]
如前所述,同步整流器驱动器电路222a被配置为至少在阶段(b)的最后部分期间使用模式m1,其中同步整流器驱动器电路222a根据电压dvs来改变电压gd。例如,在所考虑的实施例中,同步整流器驱动器电路222a再次使用两种模式:
[0310]-在时刻t1处的阶段(b)开始和时刻t3之间,使用模式m2;并且
[0311]-在时刻t3和时刻t2处的阶段(b)结束之间,使用模式m1。
[0312]
具体地,在模式m2期间,同步整流器驱动器电路222a将电压gd设置为给定的恒定(固定或预定)值。因此,在该情况下,电压dvs将具有与电流i
sr
相对应的形状。
[0313]
在所考虑的实施例中,同步整流器驱动器电路222a被配置为通过检测电压dvs的绝对值是否减小并达到给定阈值电压v
ref
来确定时刻t3。具体地,一旦电压dvs减小并且达到给定阈值电压v
ref
,同步整流器驱动器电路222a就切换到模式m1,其中同步整流器驱动器电路222a根据电压dvs来改变电压gd。
[0314]
具体地,在所考虑的实施例中,同步整流器驱动器电路222a被配置为改变电压gd来保持电压dvs恒定,即,以将电压dvs保持在v
ref
的值处。一般而言,由于电流i
sr
持续降低,同步整流器驱动器电路222a必须增加导通电阻r
dson
,即,同步整流器驱动器电路222a必须降低驱动信号gd,直到驱动信号gd下降到fet的阈值电压v
th
以下并且fet断开,这对应于时刻t2。
[0315]
图17示出了如图16所示操作的同步整流器驱动器电路222a的可能实施例。
[0316]
如前所述,在该情况下,同步整流器驱动器电路222a被配置为在模式m1期间使用对驱动信号gd的闭环控制来保持电压dvs恒定。为了保持电压dvs恒定,同步整流器驱动器电路222a因此包括闭合反馈回路,闭合反馈回路将电压dvs与阈值电压v
ref
进行比较。反馈
回路在电压v
ref
处进行调节,该电压应在0》v
ref
》dvs
pk
范围内选择,例如,在dvs
pk
的10%至30%之间选择。例如,参考/阈值电压v
ref
可以由电压参考2254来提供。参考电压v
reg
也可以作为阶段b期间的最大dvs电压dvs
pk
的一小部分,经由数字核心和数模转换器、外部参考电源、外部连接到包括同步整流器驱动器电路222a的集成电路的组件等来获得。
[0317]
例如,在所考虑的实施例中,反馈回路包括(数字和/或模拟)调节器电路2250,调节器电路在输入处接收信号dvs和v
ref
,并且在输出处生成调节信号reg。具体地,在各种实施例中,调节器电路2250至少包括积分(i)组件,并且可选地包括比例(p)和/或微分(d)组件。例如,模拟调节器电路2250可以利用运算放大器来实现,运算放大器具有相关联的相应反馈网络,例如,包括用于积分组件的至少一个电容器。在各种实施例中,调节器电路2250的输入和/或输出可以具有相关联的滤波器电路,例如,被配置为对电压dvs测量值和/或信号gd中的噪声进行滤波的低通滤波器。滤波器的速度应被选择为使得栅极电压控制的动态可以被维持。
[0318]
因此,在所考虑的实施例中,信号gd可以根据信号reg来生成。例如,在同步整流器驱动器电路222a也支持模式m2的情况下,同步整流器驱动器电路222a可以被配置为将以下项用作电压gd:
[0319]-在模式m2中,恒定电压,例如vcc;以及
[0320]-在模式m1中,信号reg。
[0321]
具体地,如前所述,一旦阶段(b)结束,即,当电压dvs下降到零时,控制电路2244还应能够将信号gd设置为零。因此,在各种实施例中,同步整流器驱动器电路222a被配置为将以下项选择性地施加到端子gd:
[0322]-恒定电压(模式m2),当电压dvs达到导通阈值v
th_on
时(t1时刻);
[0323]-信号reg电压(模式m1),当电压dvs达到阈值v
ref
时(t3时刻);或者
[0324]-零(响应于检测到时刻t2)。
[0325]
例如,在所考虑的实施例中,同步整流器驱动器电路222a为此目的包括切换电路2256和2258,以及控制电路2244。例如,在各种实施例中,控制电路2244被配置为监视电压dvs并且驱动切换电路2256和2258来选择(按顺序):
[0326]-恒定电压(模式m2),当电压dvs达到导通阈值v
th_on
时(t1时刻);
[0327]-信号reg(模式m1),当电压dvs达到阈值v
ref
时(t3时刻);以及
[0328]-零,当电压dvs达到零时(时刻t2)。
[0329]
例如,如示意性所示,最后的条件可以经由零电压比较器2252来验证。
[0330]
图17还示出了切换电路的可能实施例。具体地,在所考虑的实施例中,切换电路包括经由电子开关示意性示出的多路复用器2258。因此,在所考虑的实施例中,控制电路2244可以驱动多路复用器2256在模式m1和m2之间切换。在所考虑的实施例中,多路复用器2256的输出处的信号因此并不被直接用作信号gd,而是同步整流器驱动器电路222a包括电路2256,该电路被配置为选择多路复用器2256的输出处的信号或零电压。
[0331]
例如,在所考虑的实施例中,同步整流器驱动器电路222a包括驱动器电路2256,其中驱动器电路2256接收多路复用器2256的输出处的信号作为电源电压,其因此对应于驱动器电路2256的最大输出电压,并且驱动器电路2256的输入由控制电路2244来驱动,其因此可以将信号gd设置为零或者多路复用器2256的输出处的信号。
[0332]
因此,一旦控制电路2244检测到电压dvs达到阈值v
th_on
(时刻t1),控制电路2244就驱动切换电路2256/2258来向端子gd施加恒定电压(全驱动电压)。接下来,一旦控制电路2244检测到电压dvs达到电压v
ref
(时刻t3),控制电路2244就驱动切换电路2256/2258来向端子gd施加信号reg,从而激活栅极电压成形。最后,一旦控制电路2244检测到电压dvs达到零(时刻t2),控制电路2244就驱动切换电路2256/2258来向端子gd施加零电压。
[0333]
因此,从时刻t3起,电压dvs通过减小信号gd而保持恒定。如前所述,控制电路2244还可以被配置为通过以下方式来检测时刻t3:
[0334]-确定电压dvs达到峰值dvs
pk
的时刻,或者
[0335]-相对于时刻t1,等待给定时间。
[0336]
备选地,同步整流器驱动器电路222a也可以只支持模式m1,并且一直使用栅极电压成形,从而降低电路的复杂度。
[0337]
当然,在不违背本公开的原理的情况下,在不脱离本公开的范围的情况下,结构和实施例的细节可以相对于本文中仅通过示例的方式描述和图示的内容进行广泛的变化。
[0338]
一种同步整流器驱动器电路(222a),被配置为驱动包括漏极、源极和栅极端子的同步整流器fet(sr1、sr2),同步整流器驱动器电路可以被概括为包括:第一端子(2232),被配置为连接到所述同步整流器fet(sr1、sr2)的源极端子;第二端子(2226),被配置为连接到所述同步整流器fet(sr1、sr2)的漏极端子;第三端子(gd),被配置为连接到所述同步整流器fet(sr1、sr2)的栅极端子;其中,所述同步整流器驱动器电路(222a)可以被配置为:测量所述第二端子(2226)和所述第一端子(2232)之间的电压(dvs);检测导通时刻(t1),其中所述所测量的电压(dvs)达到第一阈值(v
th_on
);检测关断时刻(t2),其中所述所测量的电压(dvs)达到第二阈值(v
th_off
);通过以下方式,根据所述所测量的电压(dvs),在所述第三端子(gd)和所述第一端子(2232)之间生成驱动信号(gd):在另一时刻(t3)和所述关断时刻(t2)之间,根据所述所测量的电压(dvs)的瞬时值来改变所述驱动信号(gd);以及在所述关断时刻(t2)和下一导通时刻(t1)之间,将所述驱动信号(gd)设置为第一值。
[0339]
所述同步整流器驱动器电路(222a)可以被配置为:在所述导通时刻(t1)和所述另一时刻(t3)之间,将所述驱动信号(gd)设置为第二值。所述同步整流器驱动器电路(222a)可以被配置为通过以下方式来确定所述另一时刻(t3):确定所述所测量的电压(dvs)在所述导通时刻(t1)和所述关断时刻(t2)之间达到峰值(dvs
pk
)的时刻(t3);从所述导通时刻(t1)开始等待给定时间;或者确定所述所测量的电压(dvs)达到给定阈值(v
ref
)的时刻(t3)。所述同步整流器驱动器电路(222a)可以被配置为通过以下方式来确定所述所测量的电压达到所述峰值(dvs
pk
)的时刻:确定先前导通时刻(t1)和相应先前关断时刻(t2)之间的持续时间;以及在所述持续时间的一半处估计所述另一时刻(t3)。所述同步整流器驱动器电路(222a)可以被配置为通过将所述驱动信号(gd)设置为对应于以下项之和的电压而在所述另一时刻(t3)和所述关断时刻(t2)之间改变所述驱动信号(gd):恒定电压(v
x
、δv)、以及与所述所测量的电压(dvs)的所述瞬时值的给定比例常数(k)成比例的电压。所述同步整流器驱动器电路(222a)可以包括被配置为存储所述峰值(dvs
pk
)的采样保持电路(2240),并且其中所述同步整流器驱动器电路(222a)被配置为根据所述所存储的峰值(dvs
pk
)来确定所述第二值。第二值可以对应于所述恒定电压(v
x
、δv)以及与所述所存储的峰值(dvs
pk
)的所述给定比例常数(k)成比例的电压之和。
[0340]
同步整流器驱动器电路可以包括:第四端子(2228);可变电流发生器(2220),被配置为生成施加到所述第四端子(2228)的可变电流(i1),其中所述可变电流(i1)可以与所述可变电流发生器(2220)的输入处接收的电压成比例;以及控制电路(2242、2244),被配置为将所述可变电流发生器(2220)的所述输入:在所述导通时刻(t1)和所述另一时刻(t3)之间,连接到所述所存储的峰值(dvs
pk
);在所述所测量的另一时刻(t3)和所述关断时刻(t2)之间,连接到所述所测量的电压(dvs);以及在所述关断时刻(t2)和下一导通时刻(t1)之间,连接到所述第一端子(2232)。
[0341]
所述第四端子(2228)处的电压可以再产生所述驱动信号(gd)。
[0342]
同步整流器驱动器电路(222a)可以包括:第五端子(2230);恒定电流发生器(2220),被配置为生成施加到所述第五端子(2230)的恒定电流(i2);以及求和电路(2224),被配置为通过将所述第四端子(2228)处的电压和所述第五端子(2230)处的电压求和来生成所述驱动信号(gd)。所述同步整流器驱动器电路(222a)可以被配置为在所述另一时刻(t3)和所述关断时刻(t2)之间改变所述驱动信号(gd),以将所述所测量的电压(dvs)调节(2250)到给定参考值(v
ref
)。所述同步整流器驱动器电路(222a)可以包括:调节器电路(2250),被配置为在输入处,接收所述所测量的电压(dvs)和所述给定参考值(v
ref
),并且在输出处生成调节信号(reg),其中所述调节器电路(2250)可以包括至少一个积分组件,并且其中所述驱动信号(gd)在所述另一时刻(t3)和所述关断时刻(t2)之间,根据所述调节信号(reg)来确定(2244、2256、2258)。
[0343]
集成电路可以被概括为如上所述的同步整流器驱动器电路(222a)。
[0344]
一种电子谐振转换器(20)可以被概括为包括:用于接收输入电压的两个输入端子(200a、200b)和用于提供输出电压(v
out
)或输出电流(i
out
)的两个输出端子(202a、202b);变压器(t),包括初级绕组以及第一(t2a)和第二(t2b)次级绕组;求和级(sw1、sw2),其经由谐振回路(cr、ls、l
p
)而被连接到所述初级绕组;第一同步整流器fet(sr1),与所述第一次级绕组(t2a)串联连接所述两个输出端子(202a、202b)之间;第二同步整流器fet(sr1),与所述第二次级绕组(t2b)串联连接在所述两个输出端子(202a、202b)之间;以及两个同步整流器驱动器电路(222a)。
[0345]
一种操作同步整流器驱动器电路(222a)的方法可以被概括为包括:测量所述第二端子(2226)和所述第一端子(2232)之间的电压(dvs);检测导通时刻(t1),其中所述所测量的电压(dvs)达到第一阈值(v
th_on
);检测关断时刻(t2),其中所述所测量的电压(dvs)可以达到第二阈值(v
th_off
);通过以下方式,在所述第三端子(gd)和所述第一端子(2232)之间根据所述所测量的电压(dvs)来生成驱动信号(gd):在另一时刻(t3)和所述关断时刻(t2)之间,根据所述所测量的电压(dvs)的瞬时值来改变所述驱动信号(gd);并且在所述关断时刻(t2)和下一导通时刻(t1)之间,将所述驱动信号(gd)设置为第一值。
[0346]
上述各种实施例可以被组合来提供进一步的实施例。根据以上详细描述,可以对实施例进行这些和其他改变。一般而言,在所附权利要求中,所使用的术语不应被解释为将权利要求限于说明书和权利要求中所公开的特定实施例,而应被解释为包括权利要求所要求保护的所有可能的实施例以及其等效物的全部范围。因此,权利要求不受本公开内容的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1