一种应用于空间的高压母线电源控制器的制作方法
1.本发明属于空间电能变换技术领域,具体涉及一种应用于空间的高压母线电源控制器。
背景技术:
2.目前,航天器母线电压主要有28v、42v和100v三个等级。对地球同步轨道而言,功率需求最大的为21.6kw,母线电压为100v。对低地球轨道而言,功率需求最大的为空间站大约为30kw,母线电压为100v。
3.当前通信卫星、高分辨率sar、空间站等大功率航天器对能源系统需求不断增加,为了提供系统的效率并降低平台质量,高压(>200v)母线供电系统已经成为一种必然的选择。根据后续大功率航天器任务需求,为了减少电源系统损耗、降低电源系统质量,100v母线不能适用于超大功率电源控制与配电的需求,需要开展高电压一次母线的研究工作。
4.受限于空间用太阳电池板输出电压等级的限制(<150v),而高压母线电压>300v,若沿用传统变换器一次电源控制器非隔离的拓扑结构,电路则需要较高的电压升压比,同时还需要实现太阳电池板的最大功率跟踪(mppt),这样对变换器的优化设计提出了挑战。
5.全桥直流变换器应用于高压大功率的场合,全桥直流软开关变换器常用的主要有两种,一种是可以采用以移相控制技术输出电压电流调整的移相全桥拓扑,一种是以变频控制实现输出电压电流调整的谐振拓扑。其中移相全桥存在的主要有以下三点:一是占空比丢失问题;二是输出整流二极管的结电容与变压器漏感或外加谐振电感产生振荡,从而导致输出整流二级管上的电压振荡和电压尖峰,增大了其电压应力;三是在轻载情况下,无法满足软开关条件。其中全桥谐振主要存在的问题有以下两点:一是变频控制,不利于磁性元件和反馈环路优化设计;二是无法适用宽范围输入输出的场合。
技术实现要素:
6.本发明针对现有技术存在的不足,提出了一种应用于空间的高压母线电源控制器,为了应对航天器不断增加的功率需求,提升效率降低质量,实现太阳电池板到高压母线的高电压升压比,同时实现了太阳电池板的最大功率跟踪。
7.本发明的目的是提供一种应用于空间的高压母线电源控制器,包括:
8.下位机模块,用于通信、模拟量采集,指令控制、da给定和软件mppt算法实现;
9.滤波模块,用于放置母线滤波电容,降低母线输出阻抗,提高动态响应;
10.信号模块,用于从400v母线获得电源控制器所需
±
12v供电、获得母线电压信号vmea;
11.功率模块,用于功率变换,在太阳电池阵功率充足的情况下,调节母线电压,在太阳阵功率不足的情况下,实现太阳电池阵最大功率跟踪;其中:
12.四种类型模块通过背板实现模块之间控制信号与功率信号之间的连接。
13.优选地,所述功率模块包括非隔离的dcdc变换器与谐振变换器;所述非隔离的dcdc变换器用于实现太阳电池阵最大功率跟踪与母线控制,所述谐振变换器将非隔离dcdc变换器变换的中间母线电压变换成400v高压母线。
14.优选地,所述功率模块实现闭环控制,具体的控制过程为:通过信号调理电路获得母线电压信号v
bus
与参考电压v
ref
做pi运算获得第二误差放大信号v
ear2
,第二误差放大信号v
ear2
作为电流内环的参考基准;通过采样保持电路和rs触发器获得硬件mppt工作点电压信号v
mppt-hard
与方阵电压v
sa
信号做pi运算,获得第一误差放大信号v
ear1
,第一误差放大信号v
ear1
作为电流内环的参考基准,实现硬件方式最大功率的跟踪;最大功率跟踪软件的计算获得的软件mppt工作点电压信号v
mppt-soft
与方阵电压v
sa
信号做pi运算,获得第三误差放大信号v
ear3
,第三误差放大信号v
ear3
作为电流内环的参考基准,实现软件方式最大功率的跟踪;通过取小电路,获得第一误差放大信号v
ear1
、第二误差放大信号v
ear2
和第三误差放大信号v
ear3
这三个误差信号中的最小值,将最小值作为电流内环的参考基准。
15.优选地,所述硬件mppt工作点电压信号v
mppt-hard
和软件mppt工作点电压信号v
mppt-soft
为互锁关系。
16.优选地,所述功率模块实现硬件mppt功能,具体实现过程为:mppt控制电路首先对功率电路中太阳电池阵电压和电流进行采样,通过采样保持电路和rs触发器对当前电流或者电压值与前一状态的值进行对比,通过rs触发器输出状态的变化实现改变太阳电池的工作点,使变换器的工作点收敛于最大功率点p
max
(v
max
,i
max
),从而使变换器实现了电导增量的控制算法。
17.优选地,所述功率模块实现软件mppt功能,具体实现过程为:首先由当前的太阳电池输出电压v(k)和电流i(k),计算当前的太阳输出功率p(k),与前一次的输出功率p(k-1)作比较,当功率增加时,则比较v(k)与v(k-1)的大小关系,如果电压值也增加了,则把v(k)赋值给v(k-1),并将v(k)的值继续增加
△
v;如果电压值减小了,则把v(k)赋值给v(k-1),并将v(k)的值减小
△
v;当功率值减小时,仍然判断v(k)与v(k-1)的大小关系,当电压增加时,将v(k)减小
△
v;当电压减小时,将v(k)增大
△
v;如果功率值没有变换且电压值也没有变化,则无需动作。
18.优选地,所述非隔离dcdc变换器包含buck、boost、super-buck和super-boost中的一种或者多种。
19.本技术的有益效果是:
20.1.本发明中的最大功率跟踪可以通过传统航天器采用的硬件mppt实现最大功率跟踪,同时软件mppt可以作为硬件mppt的备份,在硬件mppt故障的情况下,可以通过软件计算的方式实现最大功率点跟踪,提升了电源控制器的可靠性。
21.2.开关频率固定,降低了反馈控制环路的设计难度。
22.4.本发明后级为谐振变换器,整流二极管可以实现zcs,无反向恢复问题。
23.5.本发明两级拓扑中的后级为谐振变换器,整流二极管无震荡问题,以全桥整流为例,二极管承受电压最高为输出母线电压,降低了在空间应用中的绝缘耐压防护的难度。
附图说明
24.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或现
有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其它的附图。
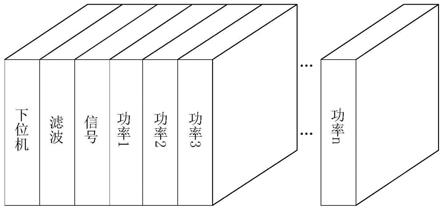
25.图1为本发明优选实施例的电路框图;
26.图2为pwm控制的谐振隔离式变换器功率部分原理框图;
27.图3是本发明中硬件mppt实现最大功率跟踪的原理框图;
28.图4是本发明中最大功率跟踪与母线电压控制环路的原理框图;
29.图5是本发明中的功率模块实现软件mppt程序流程图。
具体实施方式
30.为了使本技术领域的人员更好地理解本技术方案,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分的实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本技术保护的范围。
31.需要说明的是,本发明列举的电路图中电阻、二极管、功率管等元器件,也可以是等效电阻、二极管、功率管组合网络,但以本发明电路图最为简洁。
32.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本技术。
33.为了解决背景技术中的问题,本发明中提出高压母线电源控制器采用两级拓扑级联式结构,
34.两级拓扑可以采用非隔离拓扑dcdc在前,谐振隔离拓扑在后的级联方式,同时也可以采用谐振隔离拓扑在前,非隔离拓扑dcdc在后的级联方式。非隔离dcdc变换器处于后级的连接方式,功率开关管与二极管承受应力高,同时需求对太阳电池阵进行功率调节,本发明采用的非隔离dcdc变换器在前,谐振隔离拓扑在后的级联方式。前级非隔离dcdc变换器对太阳电池板实现mppt最大功率跟踪,后级定频控制的谐振隔离全桥变换器实现电压高增益变换器。
35.请参阅图1,一种应用于空间的高压母线电源控制器,包括:下位机模块,滤波模块,信号模块和功率模块,可以根据电源控制器所涉及的功率等级灵活配置模块数量。
36.下位机模块主要完成的功能是通信、指令控制、模拟量采集,da给定和软件mppt算法实现等。
37.滤波模块主要放置母线滤波电容,起到降低母线输出阻抗,提高动态响应的作用。
38.信号模块的主要作用从400v母线获得电源控制器所需
±
12v供电、获得母线电压信号v
mea
等作用。
39.功率模块的主要主用是功率变换,在太阳电池阵功率充足的情况下,起到调节母线电压的作用,在太阳阵功率不足的情况下,实现太阳电池阵最大功率跟踪。
40.如图1所示:本技术采用模块化设计,共计有四种类型的模块,分别为功率模块、信号模块、滤波模块和下位机模块,可根据电源系统的功率需求,对模块数量进行扩展。功率模块主要完成对太阳电池最大功率点的跟踪,实现电压等级的隔离变换,信号模块主要用
于采集母线输出电压电流信号,获取闭环控制所需的误差放大信号等,滤波模块主要用于增加母线滤波电容数量,提高电源控制器的输出动态相应特性,下位机模块主要用于完成信号采集、通信和太阳电池板最大功率跟踪软件mppt计算工作。
41.如图2所示:功率模块中主动率电源,包括非隔离的dcdc变换器与谐振变换器。非隔离的dcdc变换器用于实现太阳电池阵最大功率跟踪与母线控制。谐振变换器将非隔离dcdc变换器变换的中间母线电压变换成400v高压母线。
42.如图3所示,功率模块实现闭环控制的功能框图:通过信号调理电路,获取母线电压信号v
mea
,与参考电压v
ref
做pi运算获得v
ear2
,可以作为电流内环的参考基准。通过采样保持电路和rs触发器获得v
mppt-hard
与方阵电压v
ref1
信号,v
ear1
可以作为电流内环的参考基准,实现硬件方式最大功率的跟踪。最大功率跟踪软件的计算获得v
mppt-soft
与方阵电压v
ref3
信号,v
ear1
可以作为电流内环的参考基准,实现软件方式最大功率的跟踪。通过取小电路,实现v
ref1
、v
ear2
和v
ear3
获得三个误差信号中的最小值,将最小值作为电流内环的参考基准,从而实现了在太阳电池阵功率充足的情况下,电源控制器调节母线的作用,在太阳电池阵功率不满足负载需求的情况下,实现电源控制器的最大功率跟踪。
43.通过硬件或者软件的方式,可以实现v
mppt-hard
和v
mppt-soft
信号的开启与关闭,避免在硬件或者软件mppt电路发生故障的情况下,实现故障的隔离,同时可以通过软件或硬件实现v
mppt-hard
和v
mppt-soft
的互锁,防止软件与硬件的冲突。
44.如图4所示,功率模块实现硬件mppt实现功能框图:mppt控制电路首先对功率电路中太阳电池阵电压和电流进行采样,通过采样保持电路和rs触发器对当前电流或者电压值与前一状态的值进行对比,通过rs触发器输出状态的变化实现改变太阳电池的工作点,使变换器的工作点收敛于最大功率点p
max
(v
max
,i
max
),从而使变换器实现了电导增量的控制算法。
45.如图5所示,功率模块实现软件mppt程序流程图:首先由当前的太阳电池输出电压和电流v(k)、i(k)计算当前的太阳输出功率p(k),与前一次的输出功率p(k-1)作比较,当功率增加时,则比较v(k)与v(k-1)的大小关系,如果电压值也增加了,则把v(k)赋值给v(k-1),并将v(k)的值继续增加
△
v;如果电压值减小了,则把v(k)赋值给v(k-1),并将v(k)的值减小
△
v;当功率值减小时,仍然判断v(k)与v(k-1)的大小关系,当电压增加时,将v(k)减小
△
v;当电压减小时,将v(k)增大
△
v;如果功率值没有变换且电压值也没有变化,则无需动作。
46.通过上述详细的叙述可知,mppt技术的本质是通过采集太阳能光伏电池的输出电压和电流,进行程序计算运行,控制太阳能光伏电池的输出电压和输出电流,使其工作在最大功率点出的电压,进而实现最大功率的输出。高压母线主动功率调节器单元中是控制太阳能光伏电池的输出电压的方法实现mppt。
47.所述非隔离dcdc变换器包含buck、boost、super-buck和super-boost等拓扑。
48.所述谐振变换器包含串联谐振变换器、并联谐振变换器、串并联谐振变换器、llc谐振变换器、lcc谐振变换器、lcl谐振变换器和cllc谐振变换器等。
49.以上所述仅为本技术的优选实施例而已,并不用于限制本技术,对于本领域的技术人员来说,本技术可以有各种更改和变化。凡在本技术的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1