飞行器启动和发电系统的制作方法
1.本文中公开的主题一般涉及双向能量转换无刷电动旋转装置的组合,其在启动模式中将电能转换成机械能,在发电模式中将机械能转换成电能。具体地,所述主题涉及飞行器启动和发电系统,其包括三电机组、启动器/发电机(s/g)和基于igbt的数字控制装置,在本文中称作逆变器/变换器/控制器(icc)。
背景技术:
2.目前存在用于飞行器的启动器发电机系统,其既被用来启动飞行器发动机,又在启动之后在发电模式中利用飞行器发动机,从而提供电能以对飞行器上的系统供电。可以从飞行器的涡轮发动机驱动的发电机和变换器(egc)得到高压直流(dc)电。可以从由飞行器的涡轮发动机驱动的ac发电机或者从dc电到ac电的变换中得到交流(ac)电。已知使用宽带隙装置(a wide band gap device)在飞行器的涡轮发动机驱动的发电机和变换器(egc)的高压dc系统中或者在由飞行器的涡轮发动机驱动的ac发电机的dc链接电压生成中实现效率。同样,已知使用宽带隙装置在飞行器的涡轮发动机驱动的发电机和变换器(egc)的ac系统中或者在由飞行器的涡轮发动机驱动的dc发电机的ac链接电压中实现效率。低开关损耗、低导通损耗和高温能力是宽带隙装置的三个优点。
3.期望控制飞行器的发电系统中的宽带隙装置以便一贯地实现效率。
技术实现要素:
4.在一方面,飞行器启动和发电系统包括:启动器/发电机,所述启动器/发电机包括主机、励磁机和永磁发电机;具有基于mosfet的桥配置的逆变器/变换器/控制器(icc),icc连接至所述启动器/发电机,并生成ac电以在启动模式中驱动启动器/发电机,用于启动所述飞行器的原动机,并在所述原动机已经启动之后在所述启动器/发电机的发电模式中将从所述启动器/发电机获得的ac电转换成dc电;以及被配置成驱动基于mosfet的桥(mosfet-based bridge)的主桥门极驱动器。主桥门极驱动器在启动模式中使用空间矢量脉宽调制(svpwm)并且在发电模式中使用基于反向导通的无源整流来驱动基于mosfet的桥。
5.在另一方面,一种控制飞行器启动和发电系统的方法,所述飞行器启动和发电系统具有:启动器/发电机,所述启动器/发电机包括主机、励磁机和永磁发电机;逆变器/变换器/控制器(icc),所述逆变器/变换器/控制器(icc)具有基于mosfet的桥配置,所述基于mosfet的桥配置与所述主机绕组的电压输出连接,以及主桥门极驱动器,所述主桥门极驱动器被配置成驱动所述基于mosfet的桥。所述方法包括:如果在启动模式中,将功率供应至所述基于mosfet的桥,并且在启动模式中使用空间矢量脉宽调制(svpwm)驱动主基于mosfet的桥,并且其中,在启动模式中驱动所述主基于mosfet的桥启动所述飞行器的原动机;以及如果在发电模式中,则使用基于反向导通的无源整流来驱动所述基于mosfet的桥以将从所述启动器/发电机的主机绕组获得的ac电转换成dc电。
6.在另一方面,一种飞行器包括:发动机;连接至所述发动机的启动器/发电机,所述启动器/发电机具有主机、励磁机和永磁发电机。具有基于mosfet的桥配置的逆变器/变换器/控制器(icc)连接至所述启动器/发电机,并生成ac电以在启动模式中驱动启动器/发电机以用于启动所述发动机,并在所述发动机已经启动之后在所述启动器/发电机的发电模式中将从所述启动器/发电机获得的ac电转换成dc电。主桥门极驱动器被配置成在启动模式中使用空间矢量脉宽调制(svpwm)并且在发电模式中使用基于反向导通的无源整流来驱动基于mosfet的桥。
附图说明
7.在图中:
8.图1图解说明对于本主题总s/g和icc发动机启动和发电系统的现有技术的环境。
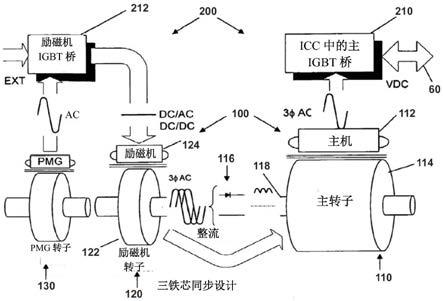
9.图2是图1的总s/g和icc发动机启动和发电系统的框图。
10.图3是图1和2的s/g和icc发动机启动和发电系统在启动模式中的框图。
11.图4是图1和2的s/g和icc发动机启动和发电系统在发电模式中的框图。
12.图5是图1中的s/g的截面图。
13.图6是具有主机基于mosfet的桥的s/g和icc发动机启动和发电系统的框图。
14.图7是基于反向导通的无源整流mosfet开关方法的示例性电路图。
15.图8是s/g和icc发动机启动和发电系统的框图,负载平衡单元具有基于mosfet的桥。
16.图9是具有四桥臂基于mosfet的桥的s/g和icc发动机启动和发电系统的框图。
具体实施方式
17.本文中公开的主题可用在诸如图1-5中示出的系统中。在一个实施例中,s/g和icc发动机启动和发电系统50包括s/g 100和icc 200。如图1、图2和图5中图示的,s/g 100是三个电机的组合,包括主机110、励磁机120和pmg 130。此布置称作三电机组。主机110可以是凸极同步机(salient synchronous machine)。主机110的定子112连接至icc 200的主igbt/二极管桥210。主机110的转子114连接至位于主转子114的轴118内部的全波或半波旋转整流器116的输出。励磁机转子122具有连接至旋转整流器116的输入的三相绕组,励磁机定子124包括通过如图2中示出的接触器220连接至icc 200的励磁机igbt/二极管桥212的三相ac绕组和dc绕组。图2提供s/g和icc系统50的框图,侧重于构成主igbt/二极管桥210和励磁机igbt/二极管桥212的部件。
18.图2中所示的icc 200包括两个igbt/二极管桥:主桥210和励磁机桥212。主桥210和励磁机桥212还分别称作主逆变器/变换器以及励磁机逆变器/变换器。每一个由数字控制组件控制。控制主igbt/二极管桥210的组件称作主数字控制组件230。替代性地,在启动模式中还可以称作启动器逆变器数字控制组件,在发电模式中称作发电机变换器控制组件。控制励磁机igbt/二极管桥212的组件称作励磁机数字控制组件240。替代性地,其在启动模式中还可以称作励磁机逆变器数字控制组件,在发电模式中称作励磁机变换器数字控制组件。主数字控制组件230连同其嵌入软件控制主桥210,其在启动模式中生成ac电以驱动s/g,并且在发电模式中将ac电转换成飞行器上需要的dc电。
19.s/g和icc发动机启动和发电系统50有两种操作模式:启动模式和发电模式。在启动模式中,s/g和icc系统50由单独的电源vdc60供电,因此与单独的电源vdc 60的连接示于图1和图2中。主机110在启动模式中作为三相绕线磁场凸极同步电动机(three-phase wound field salient synchronous motor)工作。必须出现两种情况,以便在同步电动机的轴上产生转矩。第一种情况是将三相交流电流输入到主定子112的三相绕组,第二种情况是将激励电流提供至主转子114。提供对于主定子112的频率的电流以便与主机的速度成比例。三相交流由主igbt/二极管桥210提供。由三相电流生成的旋转场与由主转子114生成的磁场相互作用,因此在主转子114的轴上产生机械转矩。
20.将激励电流提供至主转子114在常规的发电系统中是一种挑战,原因如下。在启动开始时,任何基于同步机的励磁机不生成任何功率。在低速时,基于同步机的励磁机不能够生成足够的功率来对主转子供电。这是因为对于任何基于同步的励磁机,其dc激励绕组并不将功率传递至转子绕组。实际上,对于常规的发电系统,功率只能在轴上由机械能传递。因此,为了启动发动机,生成主转子激励电流的功率必须来自励磁机定子124。换言之,在启动模式期间用于激励的能量穿过励磁机120的气隙。显然,期望旋转变压器。相反,在发电模式中,主机110作为三相绕线磁场凸极同步发电机工作。为了产生电能,一种情况出现,即向主转子114提供激励电流。为此目的,可以利用常规的同步励磁机。不同的模式需要用于激励的不同的电源。一种模式需要励磁机定子124中的ac三相电流,另一种模式需要励磁机定子124中的dc电流。
21.双功能励磁机定子与位于icc中的接触器220结合工作。在启动模式中,通过将接触器切换到其适当位置,励磁机定子中的绕组被配置到ac三相绕组中。以此模式,具有ac三相绕组的励磁机定子124和具有另一ac三相的励磁机转子122形成感应励磁机。由icc中的励磁机数字控制组件240控制,ac三相绕组的相序列的方向与机器轴的方向相反。因此,感应励磁机在其制动模式中操作。在发电模式中,励磁机定子124中的绕组被配置到dc绕组中。具有dc绕组的励磁机定子124和具有ac三相绕组的励磁机转子122形成同步励磁机。不用增加励磁机的任何尺寸和/或重量,被配置的ac和dc绕组分别在启动模式和发电模式中在励磁机转子122和励磁机定子124之间的气隙中生成必要的旋转磁场。另外,在启动模式中,ac绕组将功率从励磁机定子124传递至励磁机转子122。
22.在启动和发电模式中,无论主igbt/二极管桥210的igbt 215何时换向,对于电力开关换向,需要主转子114的机械位置信息。如图2中所示并在图3和4中详细示出的,由主数字控制组件230生成无传感器转子位置信号θ、ωe(转子位置、转子速度)。通过s/g的电压和电流信号,由主数字控制组件230中的嵌入软件构造转子位置信号。
23.图3呈现在启动模式中s/g和icc系统50的框图。有三种电机——主同步电动机110、感应励磁机120和pmg 130。主同步电动机110和感应励磁机120在启动模式中扮演重要角色。主igbt/二极管桥210从dc母线接收dc输入电(例如270vdc),并将dc电逆变成ac电。由逆变器生成的三相ac电流被馈送到主同步电动机110中。生成ac电流的门控信号被启动器逆变器数字控制组件230控制。启动器逆变器数字控制组件230测量a相电流、b相电流和dc母线电压。使用通过主数字控制组件230中的嵌入软件实现的克拉克变换(clarke transformation),a和b相电流被转换到同步静止坐标系中的α和β电流。α轴线与位于主定子的a相绕组的中心的a轴线一致,β轴线在空间上超前α轴线90电角度。使用通过相同的嵌
ωc的负序分量。正序分量ωc是无用的,原因是其不包含任何转子位置信息。因此,此分量被完全地去除。如图3中图示的,α和β电流旋转-ωct角度。因此,正序分量变成dc信号,然后通过使用二阶高通滤波器或某个其它类型的高通滤波器(例如一阶或三阶或更高阶)可以消除此正序分量。剩下的分量、基频分量和负序分量包含转子信息。不过,在零速度下将基频电流施加到机器之前,确定转子位置,同样在零速和低速下,基频分量非常弱。能够可靠地提取转子位置信息的唯一分量是负序分量。在之前的旋转之后,将分量的频率变成2ω
r-2ωc。然后由数字控制组件230执行另一旋转2ωct。旋转的输出经过六阶低通滤波器或者某个其它适当的低通滤波器(例如一阶、二阶
……
或五阶低通滤波器)。使用i
β2θ
代表β电流的剩余信号,i
α2θ
代表α电流的剩余信号,获得以下角度:
[0030][0031]
遗憾的是,上面的角度的频率具有基频的两倍频率,因此,其不能够直接用于帕克和逆帕克变换。为了将上面的角度转换成转子位置角度,检测θ
′
是否在北极到南极区域,或者在南极到北极区域。如果θ
′
在北极到南极区域,则角度是:
[0032]
θ=θ
′
[0033]
并且如果θ
′
在南极到北极区域,则角度是:
[0034]
θ=θ
′
+π
[0035]
此角度然后用在d和q电流调整回路中的帕克和逆帕克变换中。如图3中所示的,带阻滤波器(如图3中所示的500hz滤波器,从而可以使用其它阻带频率,同时保持在本发明的精神和范围内)设置在克拉克和帕克变换之间,以消除载波频率对d和q电流调整回路的干扰。
[0036]
此高频注入无传感器方法在零或低速下工作令人满意。不过,该方法对频率靠近或高于载波频率使用的速度不会表现很好。因此,当速度超过某个阈值旋转速度,诸如80rpm时,使用另一无传感器方法。此方法是电压模式无传感器方法,如下文描述的。
[0037]
电压模式无传感器的实现由以下完成。尽管所述方法已经用在感应电动机和pm电动机中,但其还没有应用到凸极同步电机,原因是定子自电感不是恒定的,实际上,电感是转子位置的函数。同步静止坐标系中常规的α和β磁链等式对用于凸极励磁同步机是不实际的,原因是电感一直在变化,使用所述磁链等式通过β磁链对α轴线磁链的反正切生成转子角。为了克服此问题,在第二实施例中,导出一对人为磁链λ
α
′
和λ
β
′
以及其表达式:
[0038][0039]
其中,rs和lq分别是主定子电阻和q轴线同步电感。两个机器参数都是恒定的。幸运的是,λ
α
′
和λ
β
′
分别与α和β磁链对齐,角度θ=tan-1
(λ
′
β
/λ
′
α
)实际上是转子角度,其可以在一旦机器速度超过阈值旋转速度,诸如80rpm时,用于帕克和逆帕克变换。可以在数字控制组件230的嵌入软件中实现该等式。此方法在机器速度超过某个旋转速度,例如超过80rpm时提供可靠的转子位置角估计。
[0040]
两种单独的方法——高频注入无传感器方法和电压模式无传感器方法的组合可以在基于同步机的启动器的整个速度范围上以足够的准确度提供转子位置信息。
[0041]
在启动期间,由主逆变器施加在主机110上的电压与速度成比例,并与主机110的内部阻抗上的反电动势(back-emf)和电压降的矢量和相当。逆变器的最大可适用电压是dc母线电压。一旦矢量和等于dc母线电压,则逆变器电压饱和。一旦饱和出现,则主机110的速度不会变得更高,d和q电流调整回路将失去控制。通常,逆变器会是过电流,并关闭。主数字控制组件230测量线间电压v
ab
和v
bc
,线间电压v
ab
和v
bc
被发送至励磁机数字控制组件240。克拉克变换被施加到两个线间电压。变换的两个输出的矢量和被用作自磁场(auto-field)减弱回路的反馈,如图3中所示的。dc母线电压被因子化(factored),并用作控制回路的参考。自磁场减弱控制回路防止逆变器电压饱和,因此,防止主逆变器电流调整回路失去控制并关闭。
[0042]
自磁场减弱可以与接近单位功率因数控制方案结合,在逆变器电压饱和时,实现在高速下的较高的功率密度。作为示例而不是作为限制,接近单位对应于大于或等于0.9但小于1.0的功率因数。尽管自磁场减弱保持气隙场,但施加预定的d轴电流分布促进主机110在接近单位功率因数区域操作。如可以从下面的等式看出,因为除了项ωl
md
(if+id)之外,自磁场减弱一直很大,项ωl
mq
idiq也变得相当大。这显著提高s/g的功率密度:
[0043]
p=ωl
md
(if+id)i
q-ωl
mq
idiq[0044]
其中,p和ω分别是机电功率和转子速度,l
md
和l
mq
分别是d和q磁化电感。
[0045]
可以提高在低于基本速度的速度下的转矩密度。如之前提到的,在主逆变器数字控制组件230中有两个电流调整回路。一个是d轴回路,另一个是q轴回路。通常,q回路控制转矩生成,d回路控制气隙中的磁场。此方法还称作矢量控制方法。为了实现高转矩密度,通过施加足够大的转子激励电流if和转矩生成电流iq,驱动进入机器与机器的磁饱和区中。然而,在电流达到某个水平之后,不管电流iq、id和if的幅值如何增大,转矩保持相同,原因是机器是磁饱和的。补救方法是利用矢量控制设置以最大化机器的磁阻转矩。由机器生成的机电转矩是:
[0046]
t=l
md
(if+id)i
q-l
mq
idiq[0047]
其中,l
md
和l
mq
分别是d和q磁化电感。一旦机器磁饱和,l
md
(if+id)项变成恒定值。因此,生成磁阻转矩的方式是向机器施加负id。已知id=i sinδ和iq=i cosδ,对上面的等式执行优化,得到id电流的最佳分布:
[0048][0049]
其中,λi是机器的内部磁链。
[0050]
基于由本发明人执行的仿真,通过在矢量控制的输入施加id分布,能够实现近似38%的转矩提高。总之,使用矢量控制集合和获得的适当id电流分布,机器的转矩密度显著地增大。
[0051]
在第三实施例中,实现最大发电效率的icc的配置和控制可适用于s/g和icc系统50的发电模式。
[0052]
在发电模式中,如图2所示,主机110变成同步发电机,励磁机120变成同步发电机。pmg130通过如所示的整流器桥将功率提供至励磁机变换器。励磁机变换器在励磁机igbt/
二极管桥212中包括两个有源igbt/二极管开关,如图4中图示的。在其门极有实线的igbt/二极管开关是用于励磁机变换器的开关。有1号igbt开关和4号igbt开关。在发电模式中,igbt 1处于pwm模式,igbt 4所有时间都导通。剩余的其它igbt都截止。2号二极管用于续流(freewheeling)。igbt 1、igbt 4和二极管2加上励磁机定子绕组,形成降压变换器,其将dc母线电压例如270vdc降低到生成同步励磁机的期望激励电流的电压。
[0053]
无源和有源整流是可配置的。取决于应用,由励磁机变换器数字控制组件240和主变换器数字控制组件230控制,主igbt/二极管桥能够变成无源整流器或有源整流器。对于功率流仅具有单个方向的应用,igbt/二极管桥由主变换器数字控制组件230被配置到二极管操作桥中。对于功率流具有双方向的应用,igbt/二极管桥由相同的数字控制组件被配置到igbt和二极管操作桥中。当功率流方向从icc到负载时,s/g和icc系统处于发电模式中。当功率流方向从负载到icc时,系统处于所称的再生模式中,这实际上是电动机模式。在无源整流中,只使用主逆变器的igbt开关的本征二极管,也称作主igbt/二极管桥。通过励磁机数字控制组件240中的嵌入软件实现电压调整,发电机变换器数字控制组件230使主逆变器中的igbt处于截止,如图4中图示的。有三个控制回路控制por的电压。最里面的回路是电流调整器。测量的激励电流是反馈,ac电压调整器的输出是参考。电流调整器在命令级别控制激励电流。下一回路是ac电压回路。如图4中所示的,反馈信号是max{|v
ab
|,|v
bc
|,|v
ca
|}。参考是dc电压调整器的输出。ac电压回路在负载断开暂态期间使调整点(por)的dc电压保持在期望范围内起到重要作用。最后一个控制回路是dc电压回路。在por测量的电压与参考电压270vdc比较。误差信号进入相应的数字控制器中的补偿调整器。因此,por的dc电压被调整。
[0054]
如之前提到的,对于需要再生的发电应用,主igbt/二极管桥会被配置到有源整流器中。在此配置中,通过以下实现电压调整。如图4中图示的,在励磁机数字控制组件中和在主数字控制组件中的嵌入代码与无源整流的那些代码不同地构造。关于对励磁机侧的控制,激励电流回路只变成pi控制回路。通过查询表生成控制回路的参考,查询表是dc负载电流的函数。以主定子中的电流接近其最小可能值的方式生成此表。对主机侧外控制回路的控制是dc电压回路。参考是270vdc;反馈信号是por电压。如图4中所示的,控制回路是pi控制器,dc输出功率的正反馈加入到pi控制器的输出。dc输出功率等于dc输出电流和por电压的积。正反馈信号和pi控制器的输出的和是功率命令,其被用作内控制回路的参考,内控制回路也是pi控制器。反馈信号是通过使用如图4中所示的发电机的电压和电流计算的功率。内控制回路的输出是电压角θv,其被用来生成svpwm矢量vd*和vq*。两个矢量是帕克逆变换的输入。变换的输出是如图4中所示的svpwm的输入。
[0055]
igbt变换器的控制可以组合自磁场变形和过度调制,以实现igbt发电模式操作的最佳效率。
[0056]
如图4中呈现的,通过以下等式计算vd*和vq*:
[0057]vd
*=|v*|sinθv[0058]vq
*=|v*|cosθv[0059]
其中,|v*|=vmag。
[0060]
为了优化效率,首先,选择vmag为1pu,因此迫使变换器进入全过度调制区域,完全地丢弃由svpwm引起的igbt开关。这最小化igbt开关损耗。igbt如相移开关一样工作。
[0061]
因为vmag是恒定的,功率回路通过调节角度θv来调整功率。当负载为零时,θv接近零,当负载增大时,θv增大。
[0062]
实现优化的效率的第二因子是优化励磁机磁场电流,使得id电流被最小化。因此,igbt的导通损耗和发电机的铜耗被最小化。已发现,励磁机磁场电流与dc负载电流直接有关。dc负载电流越高,需要的励磁机磁场电流越高。出于实现最小的励磁机磁场电流的目的,通过测量生成查询表。查询表的输入是dc负载电流,查询表的输出是励磁机定子的励磁机磁场电流的命令。以对于每个dc负载电流点,在id电流处于其最小值时找到最优的励磁机磁场电流的方式,生成该表。此控制方法不仅实现s/g和icc系统的最佳效率,还提供有效的方法,使得操作点可以容易地从发电模式摆动到再生模式,即电动机模式。因此,实现以最快速的方式将dc母线上的过多的能量发送回发电机。第三实施例的第三方面涉及在发电模式期间提供igbt换向方法。igbt的换向基于无传感器电压模式,其是启动模式中使用的类似的无传感器方法。然而,因为操作模式在只是二极管的模式和igbt模式之间变化,在进入igbt模式之前,确定转子位置角。直接从线间电压测量值而不是从svpwm命令获得v
α
和v
β
。
[0063]
通过将dc母线上的过多能量吸收到机器中,同时调节母线电压来实现再生。在发电模式期间,可能有由负载产生的过多的能量。此过多的能量提高了dc母线电压。此能量能够由机器通过本发明的过度调制svpwm提供的再生方法吸收。在这种情况中,主逆变器数字控制使电压角θv的方向反向,迫使主igbt/二极管桥进入电动机模式。因此,功率流的方向将会被反向。功率将从负载流入机器中。过度调制阻止igbt开关,因此最小化开关损耗。本发明的这个方面提供将主igbt/二极管桥从发电模式摆动到再生模式的快速方式,反之亦然。
[0064]
在本公开的主题中,考虑了在前述的环境中的其它实施例和配置。例如,第四实施例图示于图6中。第四实施例具有与第一、第二和第三实施例相似的元件;因此,相同的零件将用相同的数字标识,要理解,第一、第二和第三实施例的相同零件的描述适用于第四实施例,除非另外指出。
[0065]
现有的实施例和第四实施例之间的一个不同是第四实施例已经去掉了接触器220。尽管在第四实施例中不包括接触器220,但本发明的替代性实施例可以包括如本文中描述的接触器220。
[0066]
现有的实施例和第四实施例之间的另一个不同是如所示的第四实施例用基于金属氧化物半导体场效应晶体管(mosfet)的桥配置诸如主机mosfet桥310和励磁机mosfet桥312,代替每个励磁机120和主机110的igbt/二极管桥。每个相应的mosfet桥310包括个别可控的mosfet器件314的阵列,并且除了mosfet体二极管之外,每个器件314可以被可选地配置以包括在mosfet体二极管两端配置的外部二极管。替代性地,本发明的实施例能够使得消除用于宽带隙mosfet器件314的外部二极管,这是由于器件314具有不期望的体二极管电特性,诸如较高的功率损耗。主机mosfet桥310与主机数字控制组件330通信耦连,并可由主机数字控制组件330控制。同样,励磁机mosfet桥312与励磁机主机数字控制组件340通信耦连,并可由励磁机主机数字控制组件340控制。
[0067]
每个mosfet 314和/或每个mosfet桥310、312可以包括一个或多个固态开关和/或宽带隙器件,诸如基于碳化硅(sic)和/或氮化镓(gan)的高带宽电力开关mosfet。可以基于固态材料构造,以较小或较轻的形式因子处理大的功率水平的能力,以及非常快速地执行
电力操作的高速开关能力,选择sic或gan。可以包括其它宽带隙器件和/或固态材料器件。
[0068]
示出每个数字控制组件330、340与相应的mosfet桥310、312的每个mosfet 314门极耦连,并根据本文中描述的各种模式操作以控制和/或驱动每个相应的桥310、312。例如,主机数字控制组件330连同其嵌入软件可以控制主机mosfet桥310,以(1)生成ac电,以在启动模式中驱动s/g 100,用于启动飞行器的原动机,和(2)如上文描述的,在原动机已经启动之后,在启动器/发电机100的发电模式中,将从启动器/发电机100获得的ac电转换成dc电。在第四实施例的操作期间,主机数字控制组件330可以可控地操作主机桥310以在飞行器的原动机启动之后将控制方法从启动模式切换到发电模式。
[0069]
在一个示例中,主机mosfet桥310和主机数字控制部件330可以被配置成在启动模式中使用如本文中描述的svpwm驱动桥310。如本文中使用的“驱动”mosfet桥可以包括根据例如svpwm的控制方法示例来操作门极控制和/或开关模式。附加的开关模式是可行的。
[0070]
在另一示例中,主机mosfet桥310和主机数字控制组件330可以被配置成在发电模式中使用基于反向导通的无源整流方法驱动桥310。已经在图7中以简化的电路示出基于反向导通的无源整流的一个示例。在第一电路400中,示出通过反向传导电流,即在从源极端子到漏极端子的方向上在mosfet通道中传导电流,单相电流穿过具有有源门极的第一mosfet 402(例如电流正穿过与体二极管相对的mosfet通道)。电流还穿过电负载404,并通过具有有源门极还反向导通的第二mosfet 406返回,第一电路400还图解说明具有无源门极(例如不经由mosfet通道导通)的第三mosfet 408。
[0071]
第二电路410图解说明第一可控开关事件,其中,示出每个第二mosfet 406和第三mosfet 408具有无源门极,并且返回电流通过每个相应的mosfet 406、408体二极管传导。在第二电路410的第一可控开关事件期间,示出电流从第二mosfet 406换向到第三mosfet 408。第三电路420图解说明第二可控开关事件,其中,示出第三mosfet 408具有有源门极,并经由mosfet通道反向传导电流。在第三电路420中,第二或第三mosfet 406、408都不经由相应的体二极管传导电流。
[0072]
尽管图7只图示一个相的可控开关事件,但可以使用基于反向导通的无源整流的方法来控制mosfet桥(经由mosfet门极控制和定时)以将三相ac电整流提供至dc电,如本文中描述的。
[0073]
在又一另外的示例中,主机数字控制组件330连同其嵌入软件可以控制主机mosfet桥310,使得桥310在电动机模式中生成ac电以驱动s/g 100,用于监测和/或使飞行器的原动机运动,以便对s/g 100和/或原动机执行测试和/或诊断。在此示例中,主机mosfet桥310和主机数字控制组件330可以被配置成在电动机模式中使用如本文中描述的svpwm操作和/或驱动桥310。
[0074]
因此,主机mosfet桥310可以如由主机数字控制组件330的控制可控地动作以逆变和/或转换功率。尽管只描述了主机mosfet桥310的操作,但其它实施例可以包括励磁机mosfet桥312的类似操作,其中,励磁机mosfet桥312被励磁机数字控制组件340可控地操作,以在发电模式中使用svpwm驱动励磁机mosfet桥312。如同之前的实施例,尽管描述了双向功率流(即启动器/发电机100),但实施例可以包括单向功率流,诸如发电机。而且,可以包括附加部件,例如主机mosfet桥310数字信号处理器(dsp),以诸如通过感测或预测启动器/发电机100转子位置,提供与主机数字控制组件330的定时和/或方法操作有关的输入。
[0075]
实施例还可以被配置成使得例如通过操作主机数字控制组件330以控制主机mosfet桥310,使得过多的能量储存在飞行器的转子和/或原动机的动能中,主机mosfet桥310吸收飞行器电力系统的过多电能,并且其中,主机桥门极驱动器操作以在再生模式中使用空间矢量脉宽调制驱动主机基于mosfet的桥。
[0076]
在第五实施例中,如图8中所示的,启动器/发电机100还可以包括与主机110和/或icc 200的dc电输出452选择性耦连的负载平衡单元(llu)450。llu 450可以包括例如具有电力储存装置470(诸如电池、燃料电池或超级电容器)的集成冗余再生功率变换系统。llu 450可以被配置成这样操作,使得在过多电力的时段中,飞行器电力系统的电能被电力储存装置470选择性吸收和/或接收(即“接收模式”),过多电力的时段例如当过多的能量从飞行器电力飞行控制致动返回,或者从启动器/发电机100有过多功率生成时。llu450还可以被配置成这样操作,使得在峰值功率或不充足功率生成的时段中,诸如在发动机启动和/或高功率系统需求,诸如飞行控制致动期间,电力储存装置470的电能被供应(即“供电模式”)。
[0077]
如所示的,llu450可以包括逆变器/变换器/控制器,诸如与本文中描述的主机mosfet桥310类似的llu基于mosfet的桥480,其输出与启动器/发电机100的dc输出选择性并联。llu数字控制组件460可以被包括并被配置成在各种操作模式中选择性驱动llu mosfet桥480。例如,当llu450在供电模式期间正操作以将dc电供应至启动器/发电机100的dc电输出时,llu数字控制组件460可以通过使用双极脉宽调制(pwm)方法操作llu mosfet桥480的门极。llu 450可以在供电模式中操作以将电力提供至主机mosfet桥310,以如本文中描述的在启动和/或电动机模式中操作。在另一示例中,当llu 450在接收模式中正操作以从启动器/发电机的dc电输出接收dc电时,llu数字控制组件460可以通过使用双极pwm方法操作llu mosfet桥480的门极。
[0078]
llu 450可以在接收模式中操作以从主机mosfet桥310吸收功率,同时如本文中描述的在发电模式中操作。在这个意义上,llu 450可以操作以向飞行器电力系统释放电力,以及由过多的电力对飞行器电力系统重新充电。实施例还可以被配置成使得在llu 450故障的情况下,例如通过操作主机数字控制组件330以控制主机mosfet桥310,使得过多的能量储存在飞行器的转子和/或原动机的动能中,主机mosfet桥310吸收飞行器电力系统的过多的电能,并且其中,主机桥门极驱动器操作以在再生模式中使用空间矢量脉宽调制驱动主机基于mosfet的桥。如同上文描述的本发明的实施例,每个相应的mosfet桥310、312、480包括个体可控的mosfet器件314的阵列,除了mosfet体二极管之外,每个器件314可以被可选地配置成包括配置在mosfet体二极管两端的外部二极管。
[0079]
在又一另外的示例性实施例中,如图9中所示的,启动器/发电机100还可以包括四桥臂逆变器550,四桥臂逆变器550与主机110和/或icc 200的dc电输出452耦连。四桥臂逆变器550可以操作以在发电模式中将从主机110和/或icc 200的dc电输出452接收的dc电转换成ac电,并且还可以操作以在启动模式中生成并提供dc电,以驱动启动器/发电机,用于启动飞行器的原动机。
[0080]
如所示的,四桥臂逆变器/变换器550可以包括逆变器/变换器/控制器,诸如类似于本文中描述的主机mosfet桥310的四桥臂基于mosfet的桥580,并被配置成相对于三相ac电,具有针对ac电的三个不同相的三个输出582和针对中性输出的第四输出584。在一个示例中,三相ac输出可以是400hz。实施例还可以包括四桥臂数字控制组件560,其被配置成在
各个操作模式中选择性驱动四桥臂mosfet桥580。例如,当四桥臂逆变器/变换器550在发电模式中操作以将来自dc电输出452的dc电转换成三相(和中性)ac电时,四桥臂数字控制组件560可以通过使用双极pwm方法操作四桥臂mosfet桥580的门极。四桥臂逆变器/变换器550还可以在启动模式中操作以将电力提供至主机mosfet桥310,从而通过使用双极pwm方法,操作四桥臂mosfet桥580的门极在启动和/或电动机模式操作,如本文中描述的。
[0081]
实施例还可以被配置成使得主机mosfet桥310通过例如操作主机数字控制组件330以控制主机mosfet桥310,使得过多的能量储存在飞行器的转子和/或原动机的动能中,吸收飞行器电力系统的过多的电能,并且其中,主机桥门极驱动器在再生模式中使用空间矢量脉冲宽度调制操作以驱动主机基于mosfet的桥。如同上文描述的本发明的实施例,每个相应的mosfet桥310、312、580包括个体可控的mosfet器件314的阵列,除了mosfet体二极管之外,每个器件314可以被可选地配置成包括配置在mosfet体二极管两端的外部二极管。
[0082]
本发明的附加实施例考虑本文中描述的基于mosfet的桥的替代性重复。例如,本发明的一个实施例可以具有励磁机mosfet桥312和llu mosfet桥480。本发明的另一实施例可以具有主机mosfet桥310和四桥臂mosfet桥580。本发明的又一实施例可以只具有主机mosfet桥310。而且,本文中描述的任何mosfet桥可以根据替代性或变化的控制方法操作,并且可以包括相似或不相似的材料和/或固态器件。另外,各个部件的设计和设置可以被重新排列,使得可以实现许多不同的在线配置。
[0083]
本文中公开的实施例提供具有基于mosfet的桥构造的飞行器启动和发电系统。能够在上面的实施例中实现的一个优点是上面描述的实施例实现基于mosfet的可控桥,其能够基于控制方法和/或模式执行逆变和变换功能。例如,通过对某些功能利用svpwm,启动器/发电机能够实现同步门控,同时最小化基于mosfet的桥的损耗。而且,当在基于反向导通的无源整流的反向方向上在mosfet器件两端传导电流时,mosfet两端的功率损耗可能低于由二极管中的正向电压降引起的功率损耗,因此进一步最小化功率损耗。
[0084]
此外,随着电子飞行控制致动的兴起,与常规的飞行控制致动相比,对飞行器的电力系统的需求提高。而且,当由于电子飞行控制致动造成的对电力系统的增加地需求停止时,电力系统的可用电力的增加可能威胁可能被电涌损坏的其它敏感电子器件。并入如本文中描述的基于mosfet的门极控制方法的llu提供当电力需求很高时的补充电力,并当电力需求很低时吸收过多的电力。
[0085]
能够在上面的实施例中实现的又一优点是宽带隙mosfet器件相比常规的半导体器件,具有较低损耗、较高开关频率和较高操作温度的优点。而且,尽管在控制方法中使用体二极管,并且体二极管往往具有比单独mosfet操作更高的功率损耗,这些二极管的使用被最小化,这又为电力系统提供较低的功率损耗。
[0086]
能够在上面的实施例中实现的又一优点是实施例具有相比启动器/发电机、励磁机、llu和四桥臂逆变器/变换器系统的优越的重量和尺寸优点。而且,固态器件,诸如基于mosfet的桥具有较低故障率和提高的可靠性。在设计飞行器部件时,要解决的重要因素是尺寸、重量和可靠性。本发明产生的实施例具有较低重量、较小尺寸、提高的性能和提高的可靠性的系统。降低的重量和尺寸与飞行中的竞争优势相互关联。
[0087]
在尚未描述的程度上,可以根据需要相互结合使用各个实施例的不同特征和结构。不能在所有实施例中被图示的一个特征不旨在解读为其不能够图示,而是出于描述的
简洁进行的。因此,不同实施例的各个特征可以根据需要被混合、匹配以形成新实施例,而不管新实施例是否被明确地描述。本文中描述的特征的所有组合或排列由本公开所覆盖。
[0088]
本书面说明书使用示例来公开本发明(包括最佳模式),还使得任意本领域技术人员可实施本发明(包括制造和使用任意装置或系统和执行任意结合的方法)。本发明的专利范围由权利要求书限定,并且可以包括本领域技术人员想到的其他示例。如果这样的其他示例具有与权利要求书的文字语言没有不同的结构元件、或者如果这样的其他示例包括与权利要求书的文字语言具有非实质性区别的等同结构元件,则这样的其他示例意欲落入权利要求的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1